
鱼雷被动声自导检测概率研究
2016-12-19 00:38由文立周利辉
弹箭与制导学报 2016年4期
由文立,周利辉,2
(1 海军潜艇学院,山东青岛 266000;2 海军装备研究院,北京 100171)
鱼雷被动声自导检测概率研究
由文立1,周利辉1,2
(1 海军潜艇学院,山东青岛 266000;2 海军装备研究院,北京 100171)
为了研究鱼雷声自导性能,有必要对自导系统检测概率进行分析。从自导接收机信号处理方式、检测概率与检测阈的关系出发,提出了基于信号余量的被动声自导检测概率计算方法。仿真结果表明,鱼雷声自导系统被动检测概率在距离上成三种分布。在一定距离内,检测概率均超过0.5;在远距离上仅有极个别深度可检测到潜艇目标;在前两者之间,检测概率受深度影响较大,因此有必要进行深度上的优化选择。
声自导检测概率;接收特性曲线;检测阈;信号余量
0 引言
鱼雷自导方程将海水介质、目标、鱼雷综合在一起,是自导系统性能预报的基本关系式[1-2]。通常以自导作用距离评估鱼雷自导系统性能[1,3-4],易于计算,但分析自导系统检测概率是一种更为合理的方法。声自导系统本质上说是一部声纳,文献[5-6]采用随机声纳方程,以声纳方程中部分项的随机性研究声纳检测概率,进而进行声纳探测性能的预报。接收机工作特性曲线(ROC)表征了检测概率、虚警概率和输出信噪比的关系。文中将从ROC曲线出发,从接收机和信号的角度研究被动声自导系统检测概率与信号余量的关系,为预报自导系统探测性能提供依据。
1 被动声自导系统接收特性曲线
鱼雷被动声自导系统采用宽带接收机,信号处理采用非相干处理方式,若信号与噪声幅值服从瑞利分布,则检测概率pd[7]为:
(1)
式中:erfc为补偿误差函数;erfc-1为其反函数,且
(2)
式中:pf为虚警概率;Ra为经过自导系统波束形成后的信噪比;M为时间采样数:
M=2ΔfΔt
(3)
式中:Δf为带宽(Hz);Δt为积分时间(s)。则信噪比门限RT和检测阈DT为:
DT=10lgRT
(4)
设Δf=19kHz,Δt=4s,取不同的pd、和pf和DT则形成一簇ROC曲线,如图1所示。
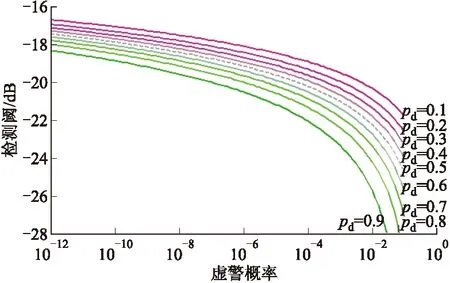
图1 鱼雷被动声自导系统ROC曲线
当pd=0.5,pf=10-4时,则RT=0.0588,DT=-18.6dB。
2 自导系统检测概率计算
检测概率pd由自导系统输出端信噪比Ra决定,自导系统性能预报时通常采用信号余量SE分析,因此将pd转化为SE的函数。被动自导方程下的信号余量定义为:
SE
(5)
信号余量SE表示自导系统接收机输出端实际信噪比超过信噪比门限的量,其中,SL为声源级,TL为传播损失,NL为环境噪声级,AG为自导系统阵列增益。根据式(5)可得:
Ra=RT10SE/10
(6)
可得,检测概率pd为:
(7)
通过式(7)的计算,即可将信号余量SE转变为pd检测概率,如图2所示。

图2 检测概率与信号余量的关系
3 仿真与结果分析
设潜艇速度为4kn,鱼雷自导系统接收频段[f1,f2]为[1kHz,20kHz],在此频带内潜艇辐射噪声谱具有-6dB/octave下降的特征,则潜艇噪声声源级SL为:
SL=SL0-1.40+10lg(10-0.6f1-10-0.6f2)
(8)
其中,SL0为潜艇辐射噪声在1kHz的谱级。文中取SL0=110dB,计算可得SL=102.6dB。
对于浅海,可以通过下式估算环境噪声谱级。
NLf=10lgf-1.7+6S+55
(9)
式中:f为频率(kHz);S为海况等级(S=0,1,…,9),则环境噪声级为:
(10)
设海况三级,则环境噪声级为NL=68.7dB。
传播损失TL的计算可采用各种水声传播模型进行,具体采用何种模型与频率有关。在宽带条件下,由于潜艇噪声谱级以-6dB/octave下降,可采用接收频段的几何中心频率f0作为传播损失计算的频率,计算可知f0=4.47kHz。设海深为70m,泥沙底质,沉积层厚度30m,海底平坦,声速梯度为负梯度和负跃层条件,潜艇深度为45m,鱼雷航行深度在30~60m之间,传播损失采用Bellhop模型[8]计算,则计算结果如图3、图4所示。
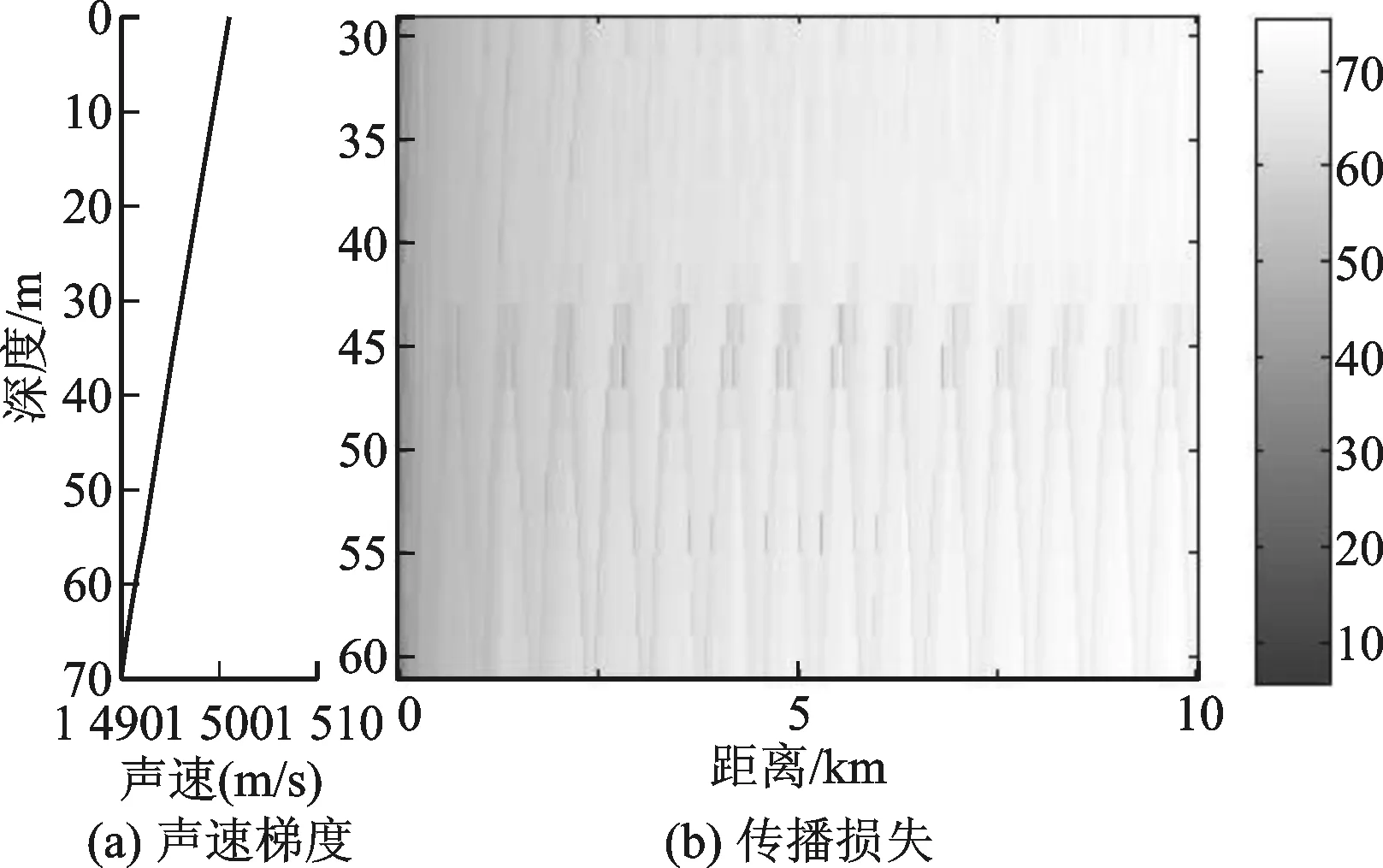
图3 负梯度水文条件及传输损失计算结果

图4 负跃层水文条件及传输损失计算结果
取AG=10.0dB,则采用式(7)计算检测概率,如图5所示。
可以看出,在4km以内,鱼雷被动声自导系统基本能探测到潜艇目标,在超过6km的距离上,只有部分深度上才能形成有效探测。

图5 鱼雷被动声自导检测概率
4 结论
仿真结果表明,鱼雷声自导系统被动检测概率在距离上成三种分布。在一定距离内,超过0.5的检测概率分布比较集中;在远距离上仅有极个别深度检测概率超过0.5;在前两者之间,检测概率受深度影响较大,部分深度检测概率在0.1以内,部分深度检测概率较高,但衰减较快。
文中的鱼雷被动声自导检测概率的预报方法,充分考虑声纳设备、海洋环境和潜艇目标对自导系统探测性能的影响,在适用性上优于声自导期望作用距离的预报,在实际研究和应用上更加符合实际情况。值得注意的是,检测概率为自导单次检测概率,不是整个搜潜过程中的探潜概率。实际探潜概率可根据检测概率进行估算。
[1] 李国付, 孙超. 鱼雷自导作用距离估算方法研究 [D]. 西安: 西北工业大学, 2007: 3-15.
[2] 周德善. 鱼雷自导技术 [M]. 北京: 国防工业出版社, 2009: 1-30.
[3] 李琛, 宁永成, 杨贵梅. 声自导鱼雷几何作用距离预报系统设计 [J]. 鱼雷技术, 2009, 17(2): 56-59.
[4] 初磊, 楼晓平, 李世令. 鱼雷声自导作用距离影响因素仿真分析 [J]. 弹箭与制导学报, 2010, 30(1): 68-71.
[5] 陈建勇, 鞠建波, 冷江. 吊放声纳被动探测的一次发现概率 [J]. 海军航空工程学院学报, 2004, 19(4): 482-484.
[6] 笪良龙. 海洋水声环境效应建模与应用 [M]. 北京: 科学出版社, 2012: 116-123.
[7] AINSLIE A Michael. Principles of sonar performance modeling [M]. Berlin: Springer & Chichester: Praxis, 2010: 53-122.
[8] PORTER M B, BUCKER H P. Gaussian beam tracing for computing ocean acoustic fields [J]. J. Acoust. Soc. Am., 1987, 82: 1349-1359.
Research on Torpedo Passive Acoustic Homing System Detection Probability
YOU Wenli1,ZHOU Lihui1,2
(1 Navy Submarine Academy, Shandong Qingdao 266000, China; 2 Naval Academy of Armament, Beijing 100171, China)
In order to research performance of torpedo acoustic homing system, it’s necessary to analyze system detection probability. According to acoustic homing system signal processing method and the relation between detection probability and detection threshold, detection probability was calculated through signal excess simulation. The results indicate that detection probability has 3 kinds of distribute at different distance. In short range, detection probability is higher than 0.5. In long range, submarine can be detected on few depths. Between the former ones, the effect of depth is powerful and it’s essential to design torpedo navigating depth.
acoustic homing detection probability; ROC curves; detection threshold; signal excess
2015-10-18
由文立(1963-),男,山东青岛人,高级工程师,硕士,研究方向:武器装备作战使用和保障。
TB566
A
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
火力与指挥控制(2021年8期)2021-09-08
考试与评价·八年级版(2020年5期)2020-10-29
小哥白尼(军事科学)(2020年8期)2020-05-22
舰船电子对抗(2019年2期)2019-05-23
军事运筹与系统工程(2017年1期)2017-07-31
水下无人系统学报(2016年3期)2016-10-13
火控雷达技术(2016年2期)2016-02-06
海洋世界(2014年2期)2014-02-27
