机载LiDAR点云定量化局部结构信息分析
2016-12-26 03:09曹志民谷延锋
地理空间信息 2016年2期
曹志民,谷延锋,吴 云
(1.东北石油大学 电子科学学院,黑龙江 大庆163318;2.哈尔滨工业大学 电子与信息工程学院,黑龙江 哈尔滨 150001)
机载LiDAR点云定量化局部结构信息分析
曹志民1,2,谷延锋2,吴 云1
(1.东北石油大学 电子科学学院,黑龙江 大庆163318;2.哈尔滨工业大学 电子与信息工程学院,黑龙江 哈尔滨 150001)

提出一种基于特征值的机载LiDAR数据定量化局部信息量分析方法。通过引入多项策略改进了传统主成分分析(PCA)点云局部结构分析对噪声敏感的缺点,利用这种鲁棒性很强的PCA局部结构分析结果,从信息论的角度给出了一种点云局部结构定量化分析的新方法。实验结果表明,该方法能够有效实现对机载LiDAR点云数据结构信息量的有效分析。
主成分分析;机载LiDAR;局部结构分析
由于机载激光雷达LiDAR具有主动获取目标大量具有精确三维空间坐标点云数据的能力,已经在摄影测量及遥感、电力系统、石油勘探等多个研究领域得到广泛应用[1-5]。通过提取机载LiDAR点云数据的局部结构信息,可以实现特定目标的三维结构重建。其中,基于特征值的方法是进行目标结构特征分析的一种典型方法[6-9]。然而,传统的基于PCA的局部结构特征值分析方法对点云数据中存在的噪声及干扰非常敏感。为了解决传统PCA方法的噪声敏感性,已经有很多学者提出了相应的改进方法。这些改进方法主要可以分为2种类型:①改进局部邻域的选择方法; ②改进局部协方差矩阵的构造方法。本文从局部邻域选择及局部协方差矩阵计算的可靠性出发,实现了一种对噪声具有较强鲁棒性的PCA局部结构分析方法。利用该方法得到的分析结果,从信息论出发,实现了LiDAR点云数据局部结构信息量的定量化计算。
1 机载LiDAR数据定量化局部结构信息分析
1.1 基于PCA的局部结构分析
对于给定点云数据P∈RN×3,令Pi∈R1×3(1≤i≤N)为点云数据中一个给定的点,局部结构分析的目的是判断该点属于点、线、面或体状结构,如图1所示。首先定义一个关于该点的邻域NBi={pj|dist(pj,pi)<T},即在距离测度dist(·)下,到点pi的距离小于阈值T的所有点的集合。在得到邻域Nbi后,即可通过计算邻域协方差矩阵Qi∈R3×3,利用PCA技术分析其局部结构:

式中,pNBi为邻域中所有点的均值。
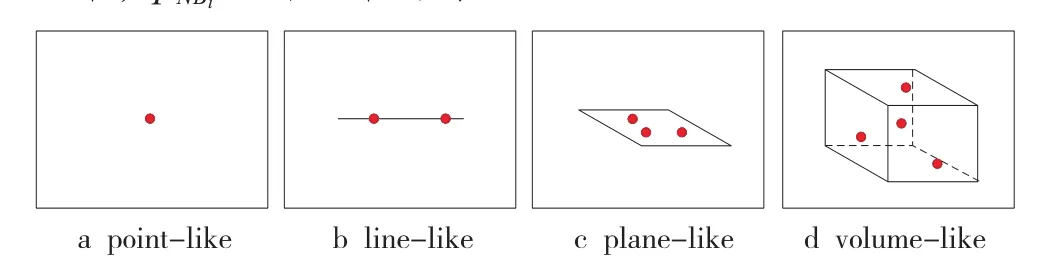
图1 3D形状分析示意图
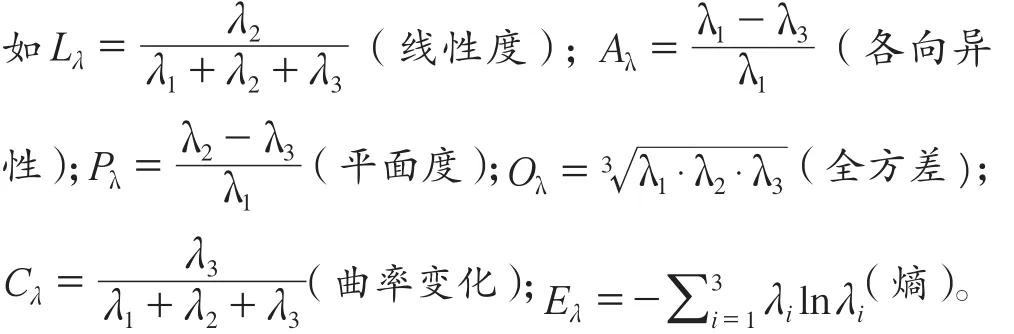
利用PCA技术对式(1)得到的协方差矩阵进行特征值分析,可以得到3个特征值λ1、λ2、λ3(λ1≥λ2≥λ3)。根据特征值间的相对大小关系,即可实现对点云局部结构的分析。当最大特征值λ1很小时,局部结构为点状;当最大特征值λ1不是很小,而λ2和λ3都很小时,局部结构为线状;当只有λ3很小时,局部结构为面状;当所有3个特征值都不是很小时,局部结构为体状。另外,除了直接利用3个特征值的大小外,还可以通过3者的组合构造多种典型特征值,
1.2 局部结构信息定量化分析
理论上,§1.1所述基于PCA技术的特征值局部结构分析能够很好地实现点云局部结构的判断。而实际应用中,由于数据采集设施中不可避免的随机误差及数据采集过程中外界环境等因素的影响,原始点云数据会存在各种随机噪声干扰,而§1.1所述的经典PCA法对噪声是非常敏感的。为此,本文通过如下4个措施来增强基于特征值的局部结构分析方法的鲁棒性:①原始数据进行归一化处理,增强计算的鲁棒性;②利用近似最近邻ANN技术,利用黎曼图结构构造局部邻域;③利用L1Median算法获取的几何中值代替协方差计算中的均值;④选取对噪声具有强鲁棒性的特征值Cλ作为局部结构分析的依据。
至此,即可利用上述鲁棒特征值分析的结果从信息论的角度出发进行定量化局部结构信息的计算,该定量化局部结构信息也可以看作是一种结构显著性特征。本文中,局部点结构往往是一些野值点造成的,而野值点可以通过简单的预处理得到筛除。为此,典型局部结构以线、面、体结构为主。若令原始点云中任一点pi为线、面、体结构的概率分别为pl、pp和pc,那么定义该点的局部结构信息量为:

式中,wpl、wpp和wpc分别为原始点云中线、面及体结构的总体概率。
本文提出的基于特征值的局部结构信息量定量化分析方法具体步骤如下:
步骤 1:利用ANN算法得到原始点云P∈RN×3中每个点的局部邻域点标号集Ids∈Rk×N(k为ANN邻域点个数)及邻域点到对应中心点的距离矩阵Ds∈Rk×N。
步骤 2:初始化结构计数矩阵SCl, SCp,SCc∈RN×1为0N×1,不同结构的结构概率矩阵Pr∈RN×3为0N×1。
步骤 3:利用本文提出的鲁棒性PCA局部结构分析方法及步骤1得到的局部邻域知识进行局部结构投票:对于任一点pi及其邻域NBi中的邻域点,利用局部几何中值构造协方差矩阵进行PCA分解,得到对应的特征值,并计算点pi所在邻域的局部曲率变化。如果<0.05,则:



步骤 4:计算定量化局部结构信息量矩阵QI∈RN×1。为了得到QI, 首先需要得到不同结构在原始点云数据中的总体概率:

其中符号·/表示元素对元素的点除运算。最终,有:

式中,Wnumsymb表示Prsymb中概率值大于0的个数。
2 实验结果
为了验证本文所提方法的有效性,以结构信息丰富的建筑物屋顶点云为例,分别利用仿真数据和实际数据进行验证。
本文所采用的仿真数据包括2个典型的具有丰富点线结构的建筑物屋顶模型,都是由100 701个点构成,点间距为0.01 m,如图2a所示。除了仿真数据外,还选取3个具有不同结构细节的真实机载LiDAR点云数据,如图2b~2d所示。其中第一个真实数据采样密度约为2点/平面,共2 621点,第2和第3个真实数据采样密度均为6.7点/km,分别有18 516点和19 845点。

图2 实验数据示意图
利用所提定量化局部结构信息分析方法,对图2所示4组数据的实验结果如图3所示(第一列为原始数据的正视图;第二列为曲率变化特征;第三列为定量化信息量) 。
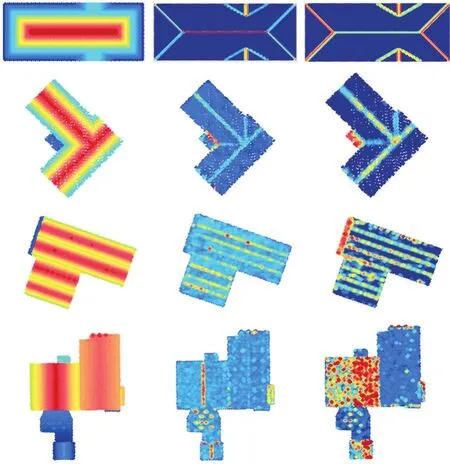
图3 定量化结构信息分析结果
3 结 语
通过增强基于传统PCA技术的点云数据局部结构信息分析方法对噪声的鲁棒性,增强了这种典型的基于特征值点云数据局部结构分析的有效性和实用性。另外,从信息论的角度更深层次地挖掘点云数据局部结构信息,能够以一种定量化形式输出,得到局部结构显著性分析结果,为后续结构信息的充分利用提供了有效支持。
[1] Lemmens M. Airborne LiDAR Sensors [J]. GIM International, 2007, 21(2): 24-27
[2] Yan J, Shan J, Jiang W. A Global Optimization Approach to Roof Segmentation from Airborne LiDAR Point Clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing, 2014(94): 183-193
[3] 李峰, 吴燕雄,卫爱霞,等. 机载激光雷达3维建筑物模型重建的研究进展[J].激光技术,2015,39(1):23-27
[4] 高敏,韩聪. 基于机载激光雷达技术的城市三维数据建设[J].测绘与空间地理信息,2014,37(11):134-135
[5] Zhang W, Wang H. 3D Building Roof Modeling by Optimizing Primitive's Parameters Using Constraints from LiDAR Data and Aerial Imagery[J].Remote Sensing, 2014(6):8 107-8 132
[6] Sampath A, Shan J. Segmentation and Reconstruction of Polyhedral Building Roofs from Aerial LiDAR Point Clouds[J]. IEEE Trans on Geoscience and Remote Sensing, 2010, 48(3):1 554-1 567
[7] Gross H, Thoennessen U. Extraction of Lines from Laser Point Clouds[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2006(36):86-91
[8] Fransens J, Reeth F. Hierarchical PCA Decomposition of Point Clouds[C]. 3DPVT'06, Chapel Hill, NC, 2006
[9] Lin C H, Chen Y Y, Su P L. Eigen-feature Analysis of Weighted Covariance Matrices for LiDAR Point Cloud Classification[J].ISPRS Journa of Photogrammetry and Remote Sensing, 2014(94):70-79
P237.3
B
1672-4623(2016)02-0010-03
10.3969/j.issn.1672-4623.2016.02.003
曹志民,博士,讲师,主要研究方向为遥感多源数据融合与处理。
2015-03-18。
项目来源:国家自然科学基金资助项目(61371180);东北石油大学培育基金资助项目(基于信息化稀疏表示的三维建筑物LiDAR数据复原)。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
世界科学技术-中医药现代化(2021年7期)2021-11-04
吉林大学学报(理学版)(2020年3期)2020-05-29
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
自动化学报(2018年7期)2018-08-20
建筑热能通风空调(2018年5期)2018-07-09
周口师范学院学报(2016年5期)2016-10-17
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04