双塔结构的伸缩式天线系统设计研究
2016-12-27 16:18陈曦
科技传播 2016年19期
陈曦
摘 要 为了使伸缩式自动架设/撤收大阵面天线能够具有更好的刚度,本文在伸缩式雷达天线背架的基础上提出了双塔式的伸缩天线背架并结合散斑图像微位移测量技术和行人检测技术构成了一种具有人工智能的大阵面天线自动展开/折叠系统,以期使高机动雷达能够更高探测精度、更大口径和适应恶劣的战场环境。
关键词 大阵面天线;伸缩式天线背架;智能监测;散斑图像微位移测量;行人检测
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2016)172-0287-03
雷达对一个战区乃至国家的防御体系起着越来越重要的作用。在以信息战为核心的现代战争中,一旦开战,敌方的情报信息系统就是打击的首要目标。而雷达作为情报系统的传感器是情报信息的源泉,由于体积庞大,部署时间长,机动性差等因素,是敌方首选打击的目标。为了生存和更好地发挥作用,对雷达的高机动部署和快速展开/撤收能力提出了越来越高的要求,地面大型雷达高机动性能已经成为重要研究课题。世界上地面高机动雷达天线都采用天线折叠的架设/撤收方式导致天线口径做不大。哈尔滨工业大学彭高亮教授的发明专利《一种伸缩式雷达天线背架》采用一种全新的方式收放天线,实现了大口径天线(WXH=15m×12m)雷达的高机动。本文在该专利的基础上,提出了一种新型双塔结构的伸缩式雷达天线系统,用于提高天线面精度和天线口径。
1 工作原理与关键技术
1.1 伸缩式雷达天线背架系统的工作原理
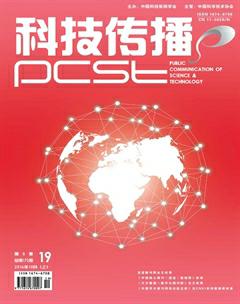
在前文提到的所谓伸缩式雷达天线背架(以下称为单塔结构的伸缩式天线背架)的专利描述中,该伸缩式雷达天线背架是一种由七节伸缩机构组成的云梯式结构,其整体外形如图1所示,工作状态如图2所示,运输收拢状态如图3所示。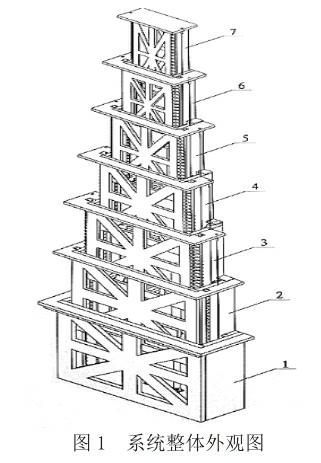
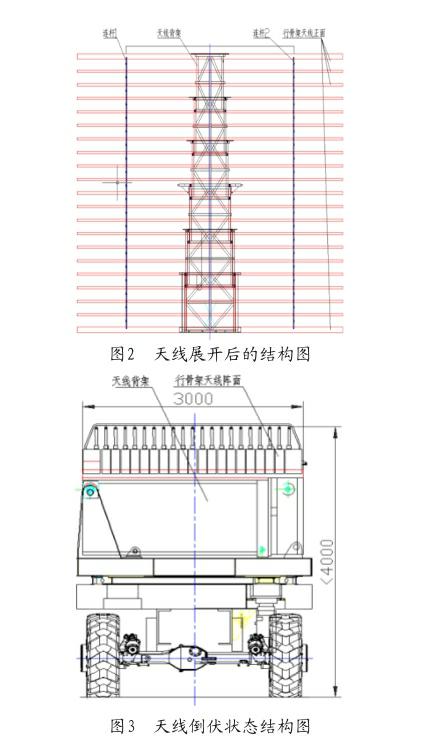
此单塔结构的伸缩式天线背架已经完成了在某型号的大阵面雷达天线上的实验,取得了令人满意的效果。在该专利的实验中,收缩时可将一个高12m的大阵面天线收缩到3米,并倒伏在运输车辆上,高度小于4m。而其展开动作可以一步到位地完成天线阵面的展开和锁定动作。受该发明专利的启发,本文提出一种针对更大规模天线阵面的双塔伸缩式天线系统,核心思路是为了解决更大规模的天线阵面的骨架在重力的作用下不可避免地出现弯曲形变的现象,将原本发明专利中一套位于阵面中轴线上的伸缩式背架扩展为两个窄小的伸缩式背架机构,使其按照天线阵面中轴线对称分布并重新排列构成一个全新的天线系统。如图4、5所示,其优点如下:双塔跨度大,减少天线骨架悬臂长度,提高天线骨架刚度;每个塔载荷减半,可以简化升降塔结构为图5所示的薄壁厢型梁形式(吊车臂的经典结构),提高可制造性和制造精度;每个塔的厚度降低,提高雷达越野通过性和稳定性;天线骨架可以做得跟轻更薄,提高伸缩比,从而可以天线做得更大刚性更好;每个塔的升降简化为两个油缸,这样双塔式天线背架与单塔式天线背架的升降油缸总数不变。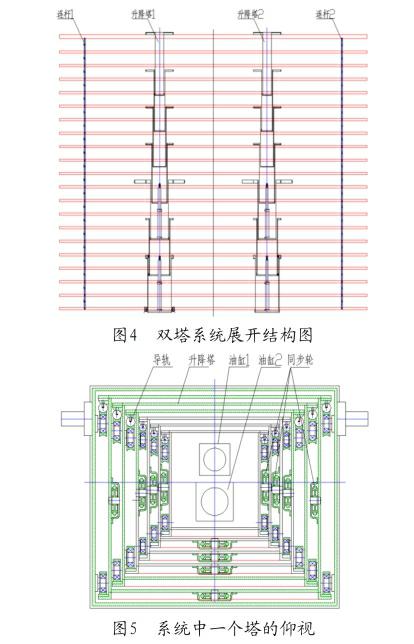
1.2 系统中的关键技术
1)原本发明专利中的单塔结构的伸缩式天线背架的七个伸缩节由双油缸机械同步驱动,没有同步问题,且即使有一个油缸出现故障也只会锁死伸缩机构,并不会造成安全事故;然而使用双塔式伸缩背架必然解决两个塔伸缩同步的问题,一旦两个伸缩机构的误差超过阈值就会使得其所带动的天线阵面扭曲形变导致破坏性的后果。因此必须设计一套机电液一体化的、控制和监视完善的天线系统确保天线系统安全性。
2)在实战环境下,雷达天线进行灯光管制条件下的工作是常见的,这时往往伸手不见五指,而在这种无法用人眼来观察的环境下,系统可操作性和安全性尤为重要。针对这一问题,在天线系统的监控单元上嵌入一套基于散斑图像的微位移测量系统,解决各种恶劣战场环境中系统工作情况的量化评估确保操作的正确性和系统安全性,并实现天线系统的智能化。
3)天线阵面在展开、收起以及雷达开机工作阶段都有不允许有人员进入的规定范围的,因此需要实时监测是否有人员出现在了危险区域。在这里我们使用一种实时行人检测算法来进行人员安全监测。
1.3 监测系统工作框图
在1.1中所提到的3个问题实际上是两套相互影响又并行工作的系统共同解决的,下面给出系统的原理框(图6)。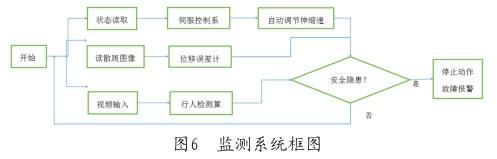
这一套监测系统包括两大部分,一是与双塔结构的伸缩式天线背架联动的伺服控制系统,以机械调节的方式尽量使双塔同步;二是智能监测系统,包括一组安装于双塔最下层分别向两个独立的液压伸缩机构发射激光并采集散斑图像的位移测量设备,以及两个能够观察到运输车辆两侧的两个摄像机用于进行行人检测。
上述3个模块中,以机械伺服系统对两个伸缩机构动作的自动调节已经有多种成熟的应用,其原理和工作方式再次不做多余的描述,下面将重点介绍在实战条件下使用的智能监测系统对整个双塔伸缩式天线背架的安全保障措施。
1)双塔不同步情况的测量。本文提到的双塔伸缩式天线背架的结构设计是由两个独立结构的液压油缸系统,采用经典的液压同步技术后,必须防止各种战场因素导致的过大同步误差产生。当双塔不同步的误差e与当前伸(缩)行程l的比值η超过一定的阈值时,就必须停止动作并将故障情况由串口通信反馈至操作人员。
由于大阵面天线的展开/收回约8min,是一个缓慢的过程,伸缩臂每秒的行程很短,且由于实战环境的要求复杂严格,因此我们希望使用一种非接触式的,高精密度且抗干扰能力较强的全天候检测系统来对双塔同步情况做出监控,因此选用较为成熟的激光散斑图像测量算法。
2)双塔伸缩结构工作区域出现行人的情况。为了快速、有效地检测出整个系统动作区域的人员,避免因视线死角产生的安全问题,本文采用文献《Pedestrian detection at 100 frames per second, Rodrigo Benenson, Markus Matias, CVPR2012》中所提到的利用stixels提取先验信息,之后结合改进的FPDW算法进行识别的方法。
深度信息可以很好地提高行人检测算法的正确率,但提取深度信息所需的时间漫长,让人望而却步。在文献中作者选择利用stixel来代替深度信息。所谓stixel(sticks above the ground in the image)即通过快速对地面上的柱状物体如行人、灯柱、树木、广告牌等进行检测,提供一种先验信息以供分类器进行学习分类,如图7所示。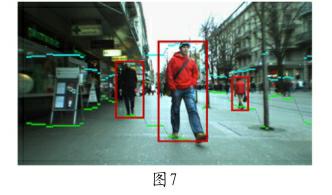
图中绿色线条为stixel信息的底部,蓝色为stixel信息的顶部,红色的框则是获取的检测目标。
所获得的stixel信息区域介于底部即地面和顶部即行地表柱状物体即本系统中拍摄区域中的行人或撑腿上边沿可能出现的大概位置之间。由此可以估算出图像中柱状物体的高度和相互之间的相对位置关系。使用stereo image可以直接且快速地计算出stixel,从而不用计算整张图像中的所有深度信息,加快了算法的速度。在文献中作者对图像中的地面和stixel进行估计,并设置stixel的高度为1.75m,在CPU上可以达到135fps的速度。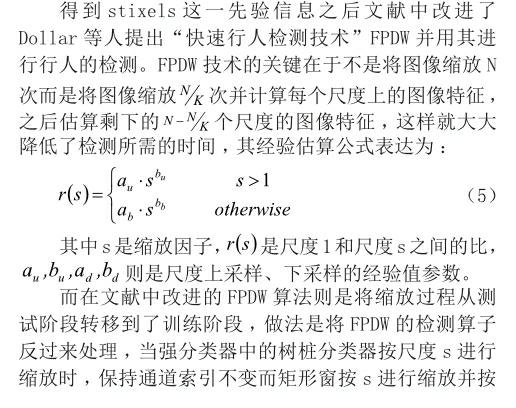
该算法在本系统中的应用其实更加简单,由于系统中要求监测的区域固定且范围不大,只是在天线展开与折叠这两个不同的阶段监测区域略有不同,可以通过在不同阶段开始之前将摄像头转到不同方向再开始运行算法即可。
2 系统软件
本系统主要由两部分构成,其一为动作控制部分,用于以可选择的本控或遥控两种方式对伸缩背架的展开和回收进行控制;其二为监测部分,负责测量两个伸缩机构是否同步和监测工作区域是否有人员进入,监测部分在出现异常状态时应能及时停止伸缩背架的动作并发出报警。图8为程序框图。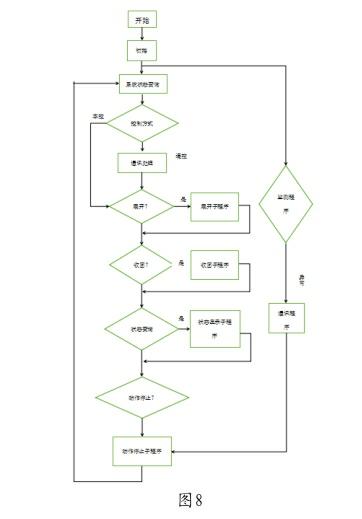
3 结论
经过设计与实践,单塔结构的伸缩式雷达天线背架已经在实际应用中取得了良好的成果,成功实现了大阵面天线的站立、展开、收回和倒伏动作。本文在此结构成功应用的基础上提出了一种针对更高天线面精度的双塔结构的伸缩式雷达天线背架系统,并以两种成熟的智能监测算法对新的系统进行保障,包括使用激光散斑图像微位移测量法对双塔同步情况的监控和以行人检测算法保障系统工作时周围人员的安全。这两种智能算法皆在工业机械位移测量和道路行人检测方面实现成功的应用,将它们与双塔系统相结合相信能够取得更好地效果。
参考文献
[1]彭高亮,一种伸缩式雷达天线背架;中国,2015109806 95.9[P].2015-12-23.
[2]郭立,邱天,王妙锋,等.基于相位分析的散斑图像位移测量算法[J].电路与系统学报,2009,14(2):127-130.
[3]岳红原,黄坚,林忠.两种性能优异的行人检测方法分析[J].现代计算机:普及版,2014(32):45-48.
[4]邱天.数字激光散斑图像的仿真建模和位移测量算法研究[D].中国科学技术大学,2006.
[5]Pedestrian detection at 100 frames per second,Rodrigo Benenson,Markus Matias, CVPR2012.