基于模糊匹配的船舶污损监测方法
2017-01-03 09:18闵少松周橹君
船海工程 2016年6期
闵少松,周橹君,彭 飞
(海军工程大学 舰船工程系,武汉 430033)
基于模糊匹配的船舶污损监测方法
闵少松,周橹君,彭 飞
(海军工程大学 舰船工程系,武汉 430033)
为及时确定船体水下清洗时机、消除船体海生物污损带来的不利影响,建立船体污损和洁净2种状态下的航行性能监测数据的模糊匹配方法,消除污损之外其他干扰因素对“轴功率-航速”关系的影响,通过计算同一航速下轴功率增量来评估船体污损程度。利用该方法对某船航行数据进行处理,并与实际情况进行对比,结果表明,基于模糊匹配的污损监测方法可为科学实施船舶水下清洗提供理论和方法依据。
船体水下清洗;海生物污损;污损监测;模糊匹配;轴功率增量
船舶水线以下船体污损会造成众多不利影响,如增加阻力、燃油的消耗与有害气体排放量,降低水下设备的性能[1]。水下清洗作为一种新型污损清除手段,能在船舶不进坞前提下有效解决上述不利影响。为确保水下清洗的质量,选择合适的清洗时机(即船舶污损到何种程度)至关重要,这就需要建立一套简单又快捷的污损监测方法。近年来,基于轴功率、航速关系的模型多为污损监测所采用[2-3],其原理是:污损生物的生长导致阻力不断增加,相同航速下轴功率也不断增加;相同航速下,通过比较与船体清洁状态下轴功率的变化,以此来判断污损程度。但“轴功率-航速”关系除了会受到污损的影响外,还会受到排水量、风、浪、流等众多因素的影响。因此,污损监测方法的关键就在于排除这些干扰因素的影响。
张子龙与M.Aas-Hansen[4]均采用理论公式与经验公式相结合的修正方式来计算各因素的影响量,予以扣除后来消除其影响。所不同的是,两者所用公式各有差异。这种基于排水量、风、浪等因素影响修正的方法却存在如下问题:①经验公式的计算精度不高,这对污损监测结果的准确性有较大地影响;②理论公式存在许多前提假设,并不适用所有船型。因此,拟建立一种污损状态和清洁状态下“轴功率-航速”的比较方法,既能消除排水量、风、浪等因素影响的方法,又能避免由于使用经验修正公式带来的误差。
1 基本原理
“轴功率-航速”关系受许多因素影响,但只要在相同影响因素下比较轴功率变化量,就可以消除这些因素的影响,同时又可避免修正方法的缺陷。
以船体洁净状态下的数据为基准数据,带有污损时的数据为污损数据,污损数据与基准数据进行模糊匹配,匹配成功则说明影响因素是相同的。但海上的情况复杂多变,各种影响因素千变万化,这就需要作以下处理,以提高污损数据与基准数据匹配的成功率,更好地进行污损的监测:①大量记录数据,将这些因素的变化尽可能多的记录下来;②污损数据与基准数据进行匹配时作一定的模糊处理:各影响因素在一定的小范围内虽然不同,但其误差程度带来的影响可忽略,将这些范围定为模糊匹配条件,污损数据与基准数据满足这些一致性匹配条件后即可认为一致。
2 监测数据模糊匹配方法
为了实现污损监测,需要采集的数据见表1。其中,轴功率及航速数据用于建立监测的模型;风速、风向、浪高、浪向、航向及水深的数据用于排除风、浪和浅水效应的影响;GPS航速与计程仪航速的数据用于排除海流的影响;排水量和纵倾的数据用于排除装载与浮态的影响;舵角的数据用于排除船舶机动带来的影响;轴转矩、主机功率作为参考数据。
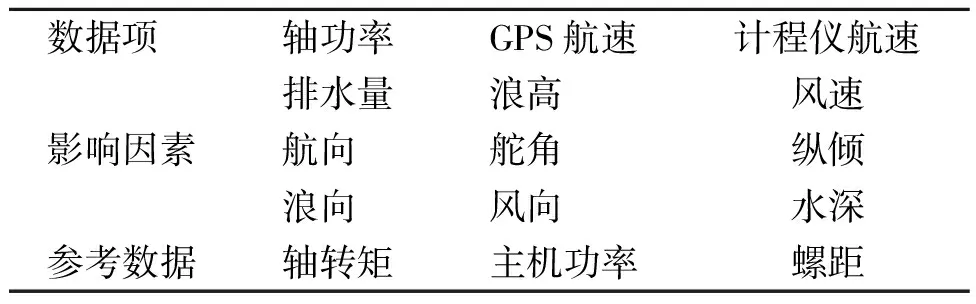
表1 需采集的数据项及影响因素
2.1 一致性匹配条件
以排水量、纵倾、风速、风舷角、浪高、浪舷角、舵角、计程仪航速及GPS航速的数据作为模糊匹配的条件。
1)排水量。测速试验中船舶排水量的偏差一般应控制正常排水量的2%以内,特殊情况应控制在3%以内[5-6]。将匹配条件定为:偏差小于3%,即2排水量误差小于3%则为一致。
2)纵倾。测速试验时,纵倾与设计状态的偏差应控制在0.1%设计水线长以内,避免纵倾不同而造成的影响。参考此标准,可将纵倾的匹配条件定为:偏差小于0.1%设计水线长。
3)风舷角、浪舷角。风舷角[7]、浪舷角分别为航速相对于风速、浪向的夹角。风、浪的观测方向用16个方位来表示,每个方位之间相差22.5°。将22.5°作为风舷角、浪舷角的度量标准,将其匹配条件定为:角度之间的差值小于22.5°。
4)风速。蒲福风级将风速分为13级,而风级越高,风速所占的速度范围越广。除了0级风外,1风级的风速变化量是最小的,为1.3 m/s,而1.3 m/s的风速变化量对于船舶轴功率的影响很小。为了简便,以相对保守的1级风的风速变化量作为匹配条件:风速之间差值小于1.3 m/s。
5)浪高。一般将浪高分为10个等级(0~9级)。船舶测速试验中,为了能忽略波浪对测速的影响,试验条件中浪要不大于2级[5],对应的最大浪高为0.5 m;由此可见,浪高变化量在0.5 m以内,对轴功率和航速影响不大。为简便起见,以2级浪高作为匹配条件:浪高之间差值小于0.5 m。
6)舵角。舵角阻力、阻力变化率都随舵角增大而增大,见图1。因此,舵角越大,舵角匹配条件应更为严格;而舵角阻力变化曲线类似三角函数,利用三角函数确定舵角匹配条件。
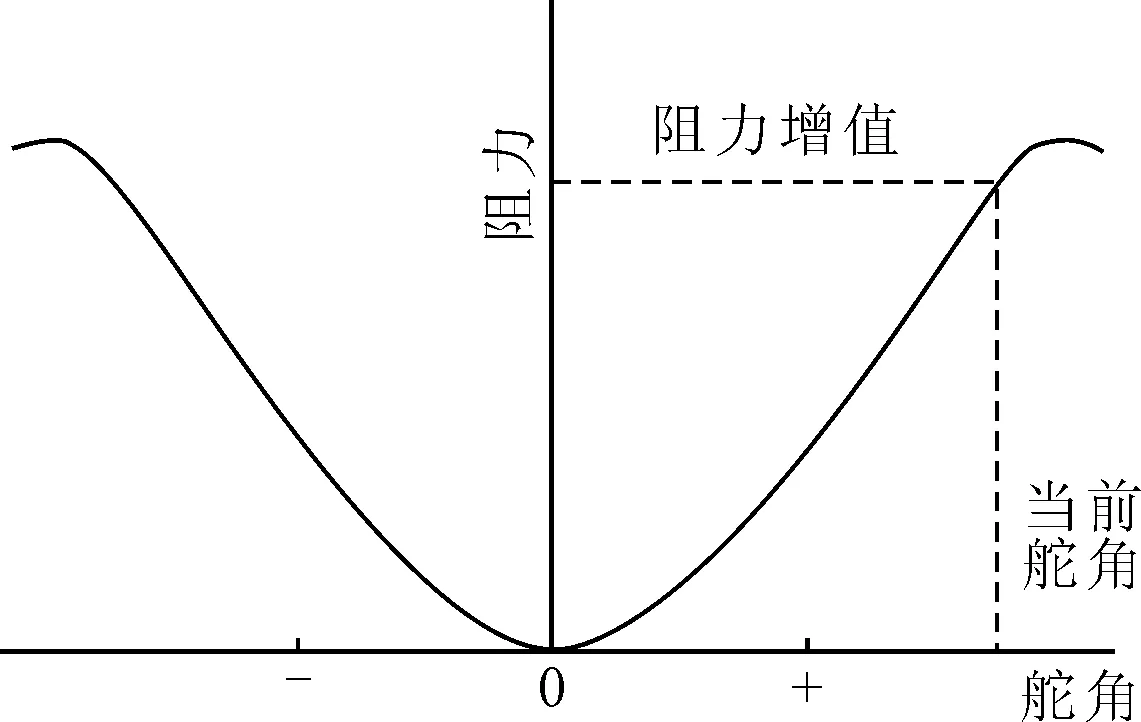
图1 舵角阻力随舵角的变化
为了减小舵角对航速的影响,船舶测速试验应尽可能少操舵,舵角不得大于5°[6]。结合上述分析,确定舵角匹配条件为:舵角之间的差值小于5cosθ(θ为当前舵角)。
7)航速。参考某船舶实际航行时记录的航速(见表2),平均航速差值为0.44 kn。将船舶航速的匹配条件定为:航速之间差值不大于0.45 kn。
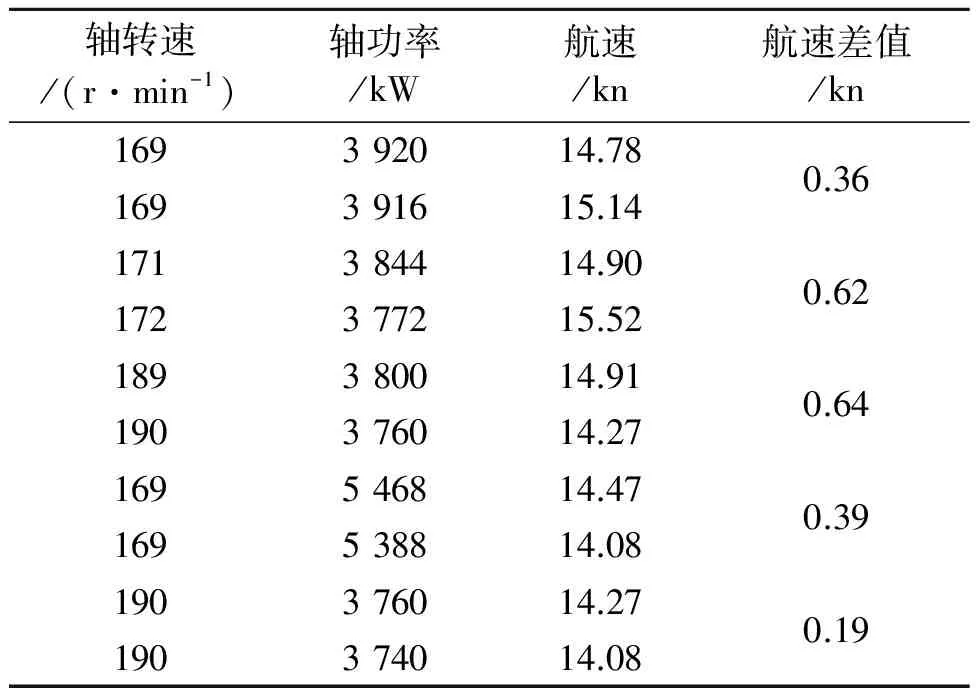
表2 某船舶航行记录
综上,9个影响“轴功率-航速”关系因素的一致性匹配条件整理见表3。
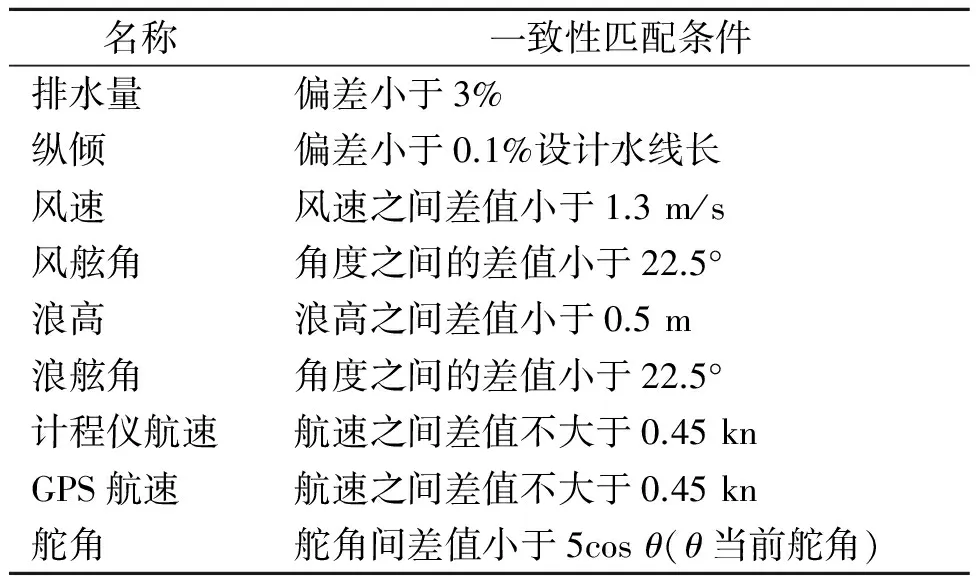
表3 相关因素的一致性匹配条件
2.2 相近程度计算
由于满足匹配的基准数据可能有多个,这就需要计算数据组之间的相近程度,找到与污损数据最相近的基准数据进行轴功率变量计算。
在计算相近程度前需将数据进行标准化处理,标准化处理公式如下。
(1)
(2)

判断污损数据与基准数据相近程度采用带权重的欧几里得距离公式[7-8]。
(3)
式中:X,Y为数据对象;xk,yk为X、Y的第k个因素;wk为第k个因素对应的权重,权重值见表4;n为X,Y中因素个数。
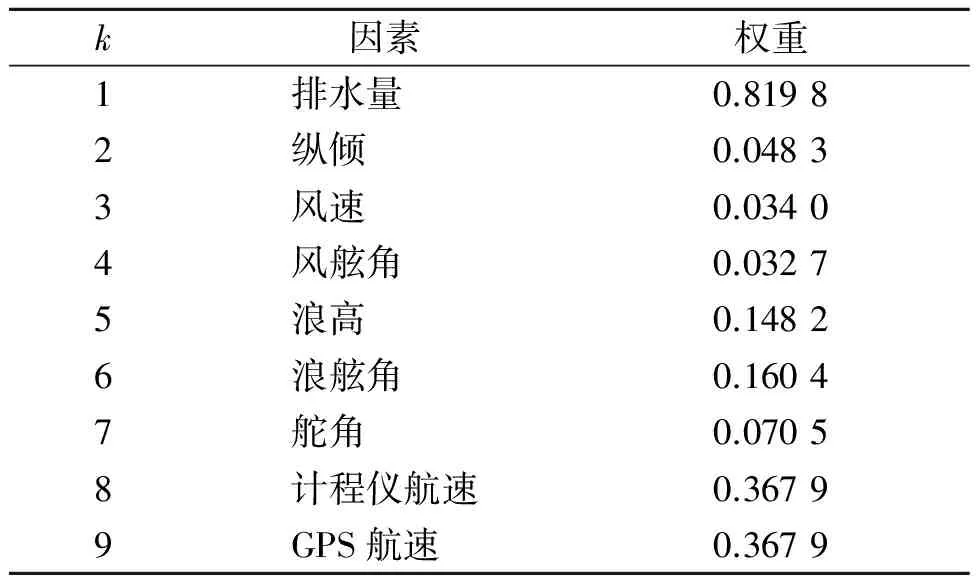
表4 各因素对应的权重
3 验证分析
3.1 验证数据
验证数据采用前期收集的某船航行数据,对其进行处理后,将所得监测评估结果与实际污损情况进行对比,以验证基于模糊匹配的污损监测方法的实用性与有效性。
某船污损状态时记录的数据如表5所示,对应的纵倾、风、浪、舵角数据如表6所示。而基准数据由于记录的数量较多,只列出污损数据匹配到的基准数据。
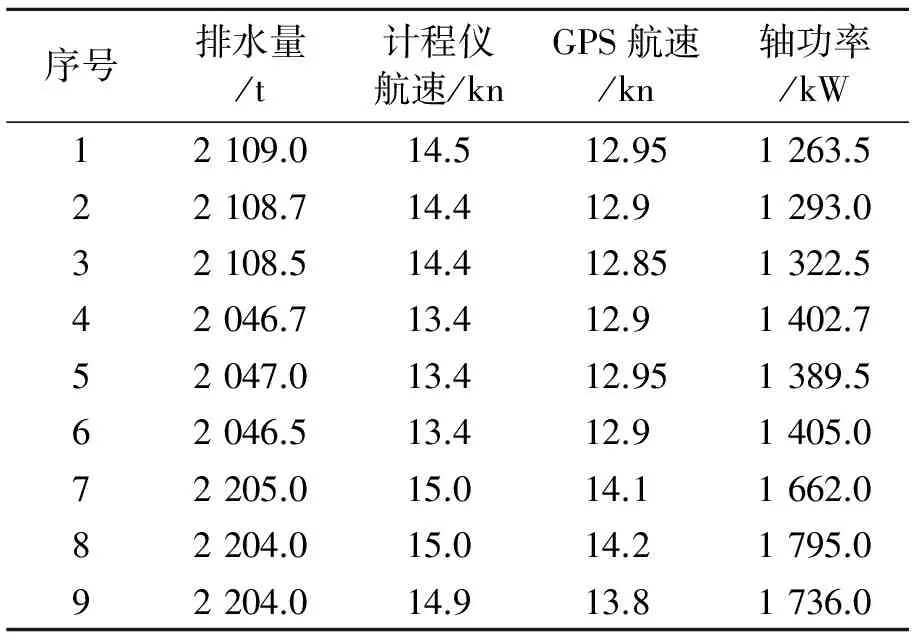
表5 污损数据
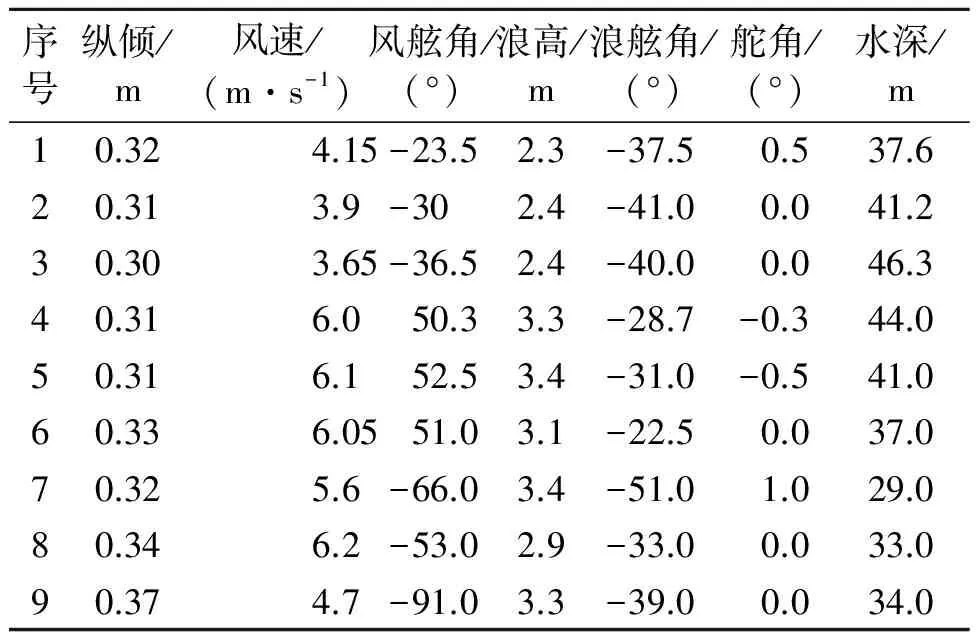
表6 污损数据
3.2 匹配计算
污损数据与基准数据库匹配后,有6条匹配成功,见表7,对应的基准数据见表8;匹配失败的有3条,见表9。
表7 匹配成功的污损数据
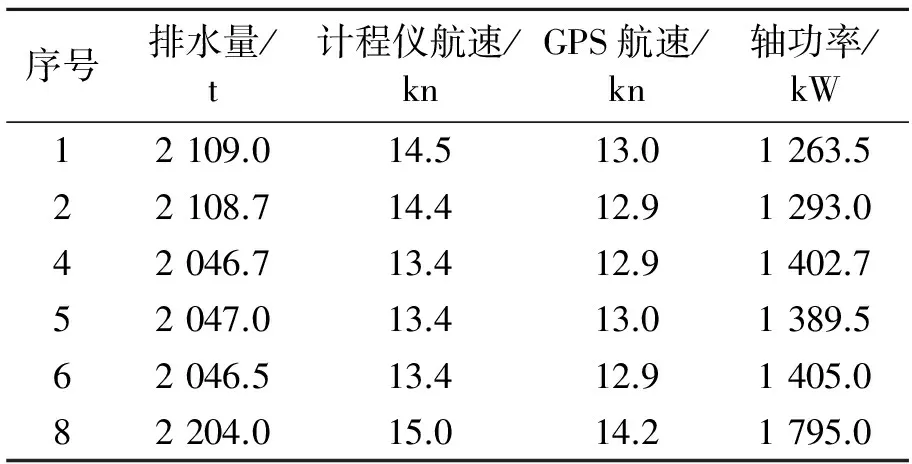
序号排水量/t计程仪航速/knGPS航速/kn轴功率/kW12109.014.513.01263.522108.714.412.91293.042046.713.412.91402.752047.013.413.01389.562046.513.412.91405.082204.015.014.21795.0
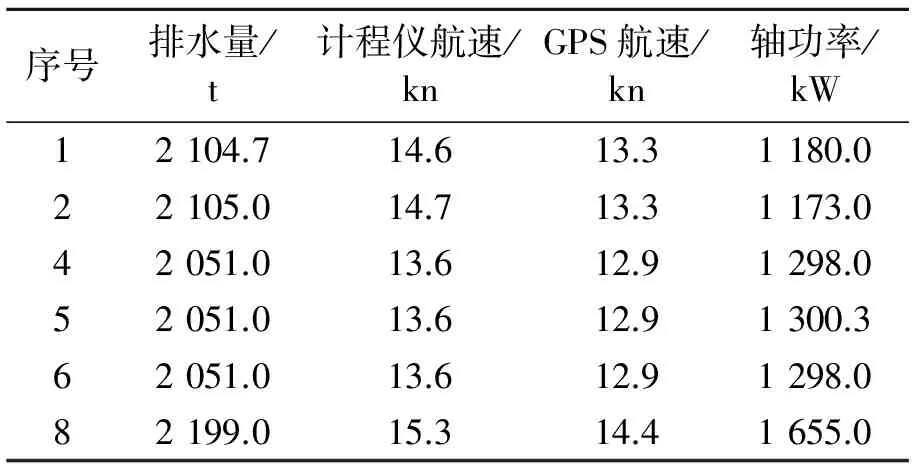
表8 匹配到的基准数据
表9 匹配失败的污损数据
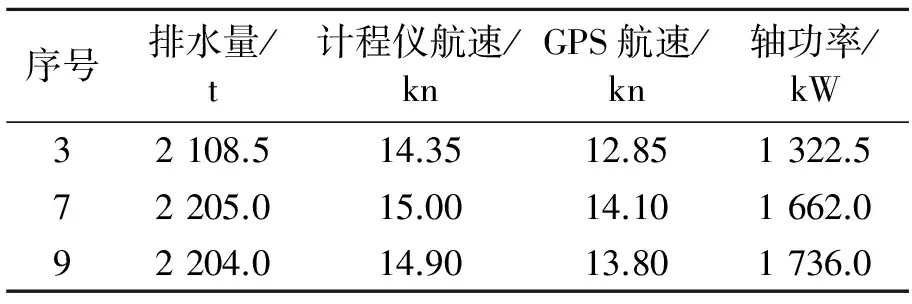
序号排水量/t计程仪航速/knGPS航速/kn轴功率/kW32108.514.3512.851322.572205.015.0014.101662.092204.014.9013.801736.0
共有6条污损数据可用于污损的监测评估,对应的轴功率增量见表10。
3.3 评估结果分析
以该船的污损程度评估图为基础,将6组污损数据的评估结果绘制在该图中,结果见图2。
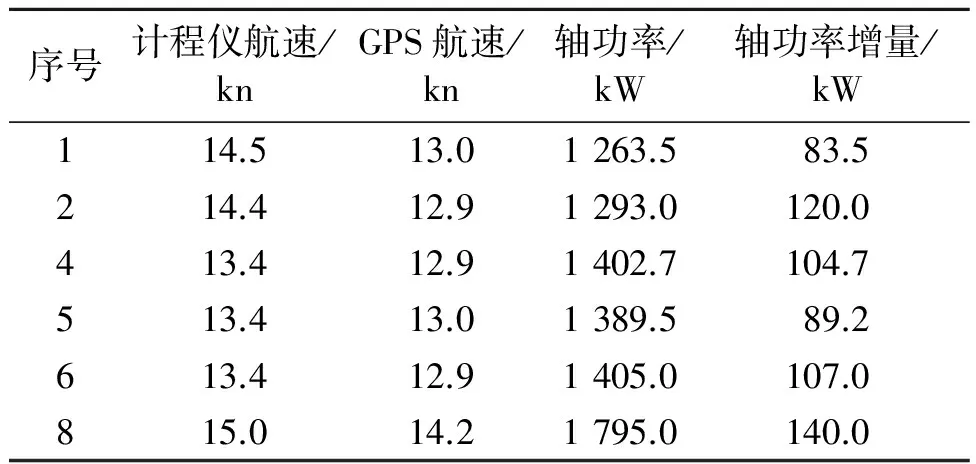
表10 轴功率增量计算
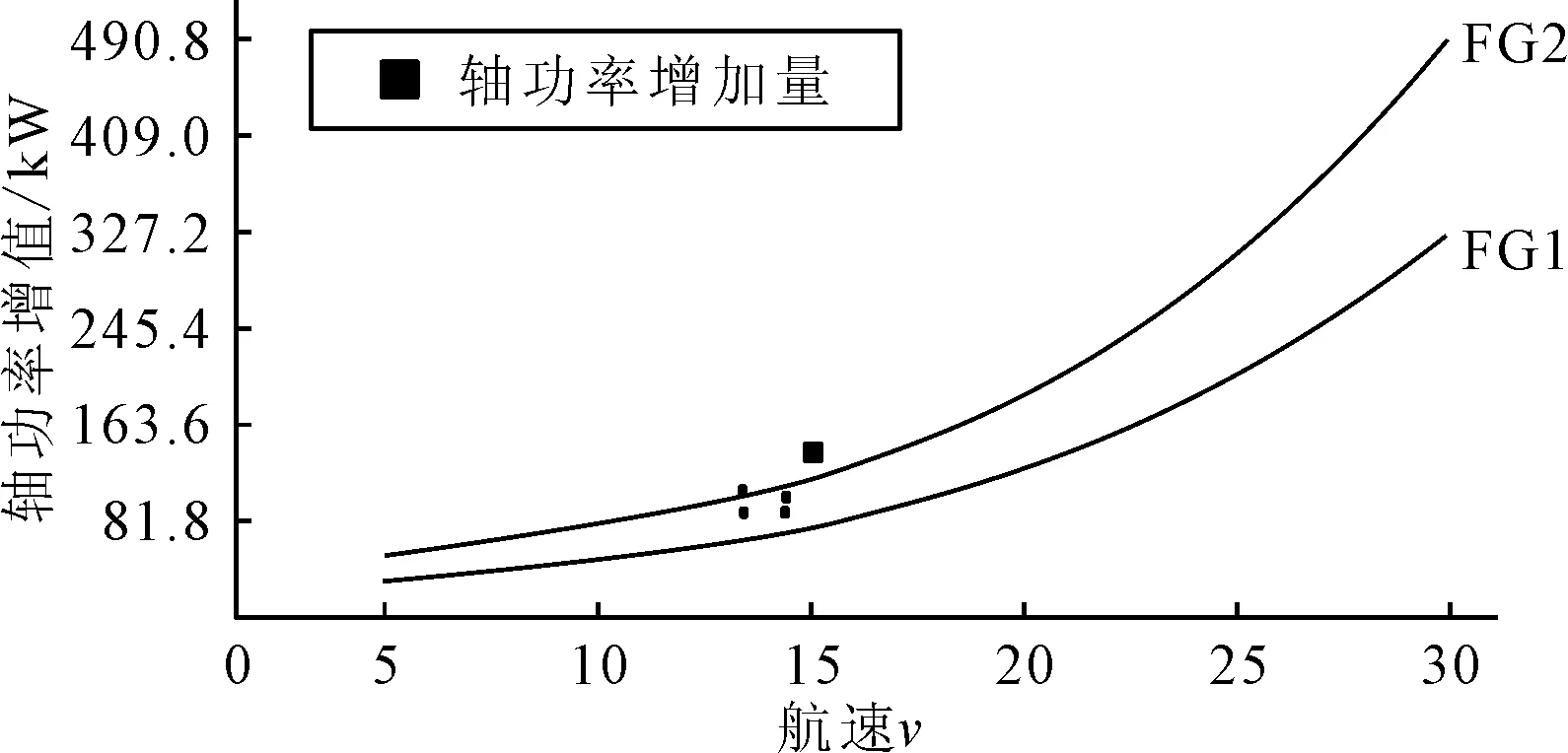
图2 评估结果
污损数据的序号是按照时间由早到晚的顺序排列的,图2中,中间2个点为1、2号污损数据,左侧为4、5、6号污损数据,右侧为8号污损数据。对比可知,船舶污损程度逐渐增加。
2015年4月中旬,该船进行水下清洗,图3为清洗前拍摄的图片资料,该船各部分都出现了点状钙质污损,污损等级[2]达到FG2。
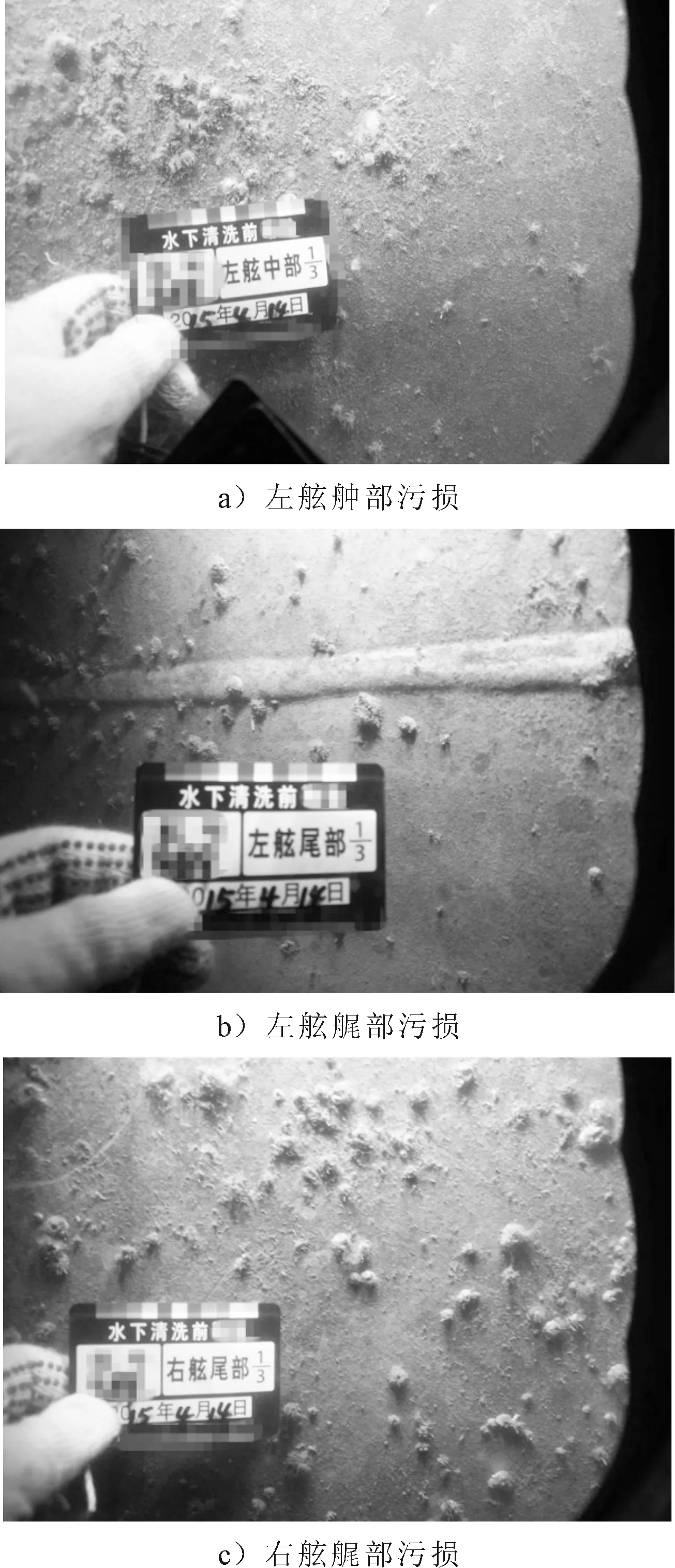
图3 水下清洗前船体艉部污损情况
由该船的实际污损程度情况可知,监测评估的结果是可靠的。因此,基于模糊匹配的污损监测方法是可靠的、有效的。
4 结束语
基于数据模糊匹配的污损监测方法的核心是利用排水量、风、浪等因素一致性匹配条件和相近程度的计算方法,过滤搜索与洁净状态船体处于相同排水量、风、浪等因素条件下,污损状态船舶的“轴功率-航速”数据对,通过比较相同航速下轴功率的变化,来确定污损对轴功率带来的影响,进而实现污损实时监测。
该方法可有效避免对排水量、风、浪等影响因素进行数据修正所带来的误差,相对简洁。利用该监测方法,对前期跟踪的某船舶航行记录的数据进行处理,并与该船的实际情况进行对比分析,验证了该方法的可行性。
该方法要求基准数据(即洁净状态下的数据)具有较大的样本,从而使污损状态下收集到的数据可以找到匹配的对象。另外,建立船体污损程度同轴功率变化之间的映射关系,是通过监测污损状态下轴功率变化预测污损程度、确定是否开展水下清洗的基础。这些工作都需要进一步努力。
[1] 沈国英,施并章.海洋生态学[M].厦门:厦门大学出版社,1990.
[2] 张子龙.船舶污损程度监测评估方法研究[D].武汉:海军工程大学,2014.
[3] 闵少松,张子龙,彭飞.基于轴功率-航速关系的船舶污损监测法改进[J].船海工程,2015,44(3):146-149.
[4] AAS-HANSEN M. Monitoring of hull condition of ships[D]. Trondheim: Norwegian University of Science and Technology,2010.
[5] 徐顺棋,徐振宇.实船试验[M].北京:海潮出版社,2006.
[6] 邵开文,马运义.船舶技术与设计概论[M].2版.北京:国防工业出版社,2014.
[7] TAN Pang-Ning,Michael Steinbach,Vipin Kumar.数据挖掘[M].完整版.范明,范宏建,译.2版.北京:人民邮电出版社,2015.
[8] HAN Jiawei,MICHELINEKAMBER,PEI Jian.数据挖掘:概念与技术[M].范明,孟小峰,译.3版.北京:机械工业出版社,2012.
Monitoring Method about Ship Fouling Based on Fuzzy Matching
MIN Shao-song, ZHOU Lu-jun, PENG Fei
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Aimed to ascertain the occasion of hull underwater-cleaning and eliminate the impact caused by hull bio-fouling, a fuzzy matching method is built which is used to match the voyage performance of fouling hull with cleaning hull, the impact on the relationship between shaft power and ship speed caused by interference factors expect the fouling can be eliminated. The degree of fouling can be evaluated by calculating the shaft power increment at the same speed. The voyage data of a ship is calculated by this method, and the calculation result is contrasted with the actual situation of this ship. The results show that the monitoring method about ship fouling based on fuzzy matching is reliable and effective.
hull underwater-cleaning; bio-fouling; fouling monitoring; fuzzy matching; shaft power increment
10.3963/j.issn.1671-7953.2016.06.010
2016-05-04
海军工程大学自然科学基金 (HGDQNJJ13038)
闵少松(1978—),男,博士,讲师
U672.7
A
1671-7953(2016)06-0044-05
修回日期:2016-05-31
研究方向:船舶维修工程,船舶水下清洗技术
E-mail:minshaosong@163.com
猜你喜欢
计算机仿真(2022年9期)2022-10-25
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
数学小灵通·3-4年级(2021年6期)2021-07-16
土木建筑与环境工程(2020年4期)2020-09-02
舰船电子工程(2020年4期)2020-06-19
中国科技纵横(2019年5期)2019-04-24
中国舰船研究(2016年3期)2016-09-02
中国水运(2015年2期)2015-04-23
物理教学探讨·初中学生版(2009年4期)2009-06-24