运动参数对近波面拍动翼推进性能的影响
2017-01-21 03:48刘鹏苏玉民李宏伟
中南大学学报(自然科学版) 2016年12期
刘鹏,苏玉民,李宏伟
运动参数对近波面拍动翼推进性能的影响
刘鹏,苏玉民,李宏伟
(哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨,150001)
研究水翼不同运动参数对近波面二维刚性拍动翼推进性能的影响。首先,根据计算流体动力学(CFD)建立了近液面水翼的计算模型,然后采用速度边界造波及动网格等方法对不同参数下水翼的运动及水动力性能进行模拟和分析,最后,计算比较水翼处于无界流中及近静水面时性能。研究结果表明:恰当的水翼摇摆与升沉间相位差能够有效增加翼推力,提高翼推进效率及波浪能利用效率。波面的存在及恰当的翼摇摆与升沉相位差可增加水翼尾涡梯度、减小涡分布范围,从而增加翼推力及效率。此外,水翼大摆幅角运动可获得较高的推力及效率,而大升沉幅度下水翼推力较高,但效率较低。
规则波;拍动翼;运动参数;尾涡;推进性能
随着陆地资源的日益枯竭,各国对海洋资源开发、海洋空间争夺日益激烈[1]。在海洋探测、监控及军事应用中,无人水下航行器(unmanned underwater vehicle, UUV)越来越重要[2],尤其仿鱼形UUV以其出色的流体力学性能及卓越的隐身性等优点引起了各国研究者的极大重视,它采用仿鱼尾拍动运动的水翼推进,但常规仿鱼形UUV以燃油或电池作为动力,同时在进行海洋探测、监控时,许多情况下要求UUV近海面长时间航行,导致其续航力极低且极易造成海洋环境污染,而海洋中丰富的波浪能为仿鱼尾拍动翼推进提供了一种极为可观的能量来源[3],许多学者进行了一系列相类似的应用于船舶助推的研究或试验[4−6]。目前,处于无界流中拍动翼的性能研究的已较为深入。CHENG等[7−8]建立三维波动板理论讨论了鱼类的最佳游动方式。JONES[9−10]采用面元法计算了单个、对摆、串列和多个摆动水翼的水动力性能。苏玉民等[11]计算了三维刚性尾鳍的水动力性能,讨论了运动参数对尾鳍水动力性能的影响。刘鹏等[12]采用有限体积法计算了多体间涡系干扰对拍动翼性能的影响。而近波面拍动翼性能研究却相对较少,对于完全依靠波浪能驱动水翼,WU[13]首先提出水翼在波面下时可从周围流体中获取能量的理论。ISSHIKI等[14−15]根据Wu的理论提出以近波面摇荡水翼作为推进器的设想并完成了相应试验。GRUE等[16]计算了近波面二维平板的性能;而对于水翼主动运动且利用波浪能推进的研究极少,DE SILVA[5]计算了近波面翼不同环境参数下的性能。虽然完全依靠波浪能驱动水翼在节能上最为理想,但这种推进方式将使UUV控制更为复杂,因此考虑仿鱼形UUV近波面航行时仍采用拍动翼主动运动推进。这些研究中只研究了部分波浪参数对翼性能的影响,而大部分翼自身运动参数对性能影响却无法定量给出,也未深入分析翼流场变化、涡系干扰等情况,因此无法解释其性能差别的根本原因;同时由于应用背景差别,其结果亦无法直接作为仿鱼形UUV利用波浪能推进的理论参考。本文作者基于有限体积法,二次开发了CFD软件Fluent,通过求解雷诺平均纳维-斯托克斯(RANS)方程,应用动网格技术,计算分析了不同运动参数下二维刚性水翼在近波面运动时的水动力性能,同时计算水翼处于无界流中及静水面下的性能作为比较,并从流场及涡系变化角度解释了近波面水翼利用波浪能推进的机理。
1 数值计算的基本原理和方法
1.1 数值计算模型
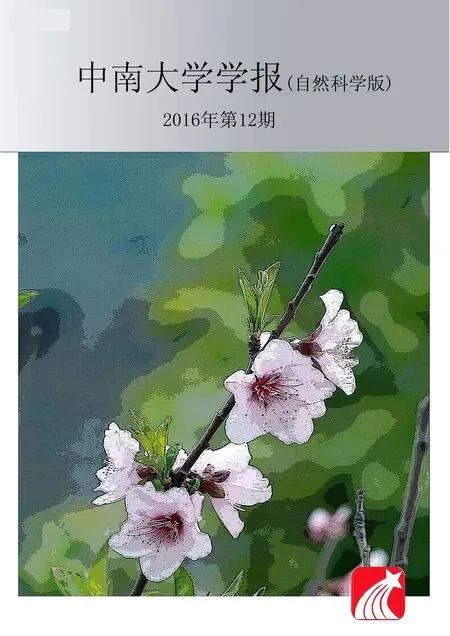
近波面拍动翼坐标系如图1所示,沉深l、弦长的水翼在深w的水中做升沉幅度0、摆幅角0的拍动运动,均匀来流速度为,入射规则波波长、波高1。固定坐标系原点位于水入口与空气入口相交点处,轴沿波传播方向为正,轴以指向空气域为正。
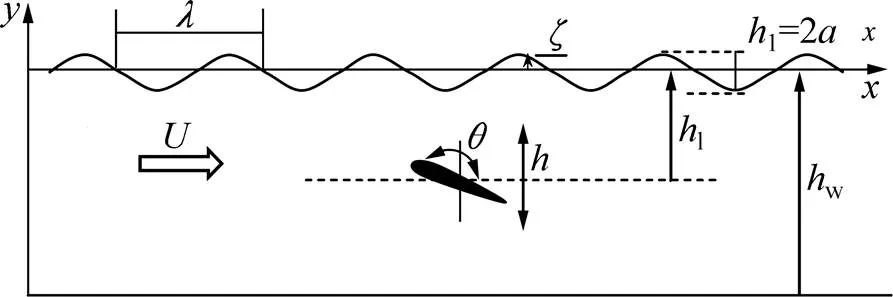
图1 近波面拍动翼坐标系
翼随体坐标系=0点位于翼纵摇点。
水翼随体坐标系下行进波的波形方程为[17]

式中:为波幅,=1/2;为波数,=2π/;0为遭遇频率;为重力加速度。
随体坐标系下,翼的运动方程为:
式中:为水翼运动频率;为水翼运动与波浪间的相位差;为水翼纵摇与升沉相位差。瞬时沿水翼方向的推力系数t、方向的升力系数l及以翼首缘点为力作用中心的力矩系数m可以通过对数值计算获得的翼表面压力分布系数s的积分获得,即:
式中:n和n分别为指向翼外部流场法向量在和方向的分量;s为二维翼表面积。定义1个周期内平均输入功率系数p与输出功率系数po:
由式(5)可得水翼运动的自身推进效率[18]:
式中:T为平均推力系数,表示t在1个周期内的平均值,。
为描述水翼对波浪能的利用,由水波理论定义单位宽度的波浪功率w及系数pw为
式中:g为波的群速度。定义水翼回收波浪功率系数pr:pr=pow−pon,其中pow及pon分别为水翼近波面及近静水面时的输出功率系数。于是可定义近波面水翼对波浪能的回收效率r为r=pr/pw。
1.2 数值计算方法
对于不可压缩的黏性流动,在笛卡儿坐标系下,用张量的形式表示的时均连续性方程和RANS方程可分别写为[19]:

式中:u和u均为速度分量的时均值;p为压力的时均值;′和′均为速度分量的脉动值;为速度分量乘积的时均值;S为动量方程的广义源项;为流体的动力黏性系数。
计算中的湍流模型为RNG−模型,采用速度边界造波法及阻尼消波法产生数值波浪,应用VOF法捕捉自由液面变化,采用PISO算法加快计算收敛。用非结构网格划分整个流域,并应用动网格技术保证水翼运动过程中网格质量,为满足计算精度要求,网格在近自由液面及近水翼处进行加密。计算网格边界条件设置分别如图2和图3所示。
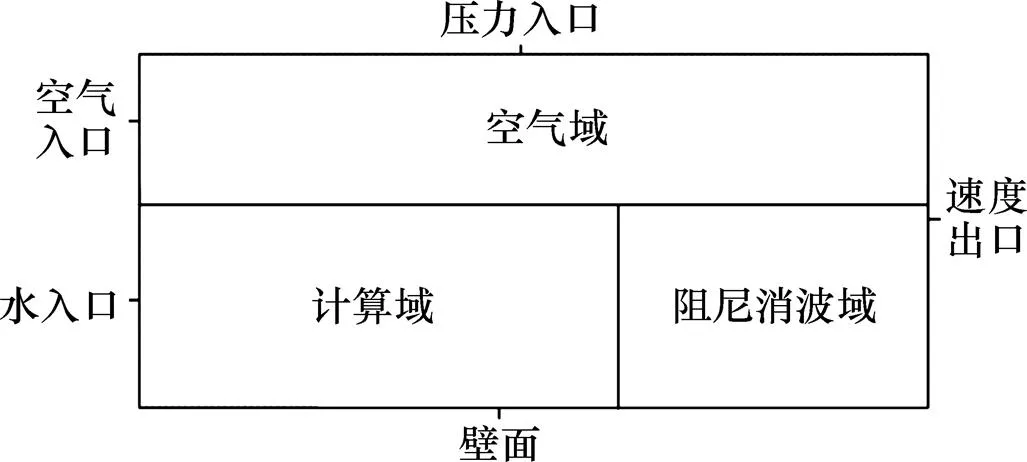
图2 数值水池示意图

图3 计算域网格
2 数值计算方法有效性验证
与本文研究相关的试验是ISSHIKI[14−15]于1984年完成,试验在长×宽×深为25 m×1 m×0.71 m水池中进行,试验中水翼为弦长=0.4 m的NACA0015翼型,翼纵摇中心在距水翼前缘0.12 m处,入射波波幅=0.048 m。水翼通过弹性机构与运动载体连接,二者水平运动速度相同。试验中,首先在静水中水翼与载体以一系列恒定水平速度前进,测得整个机构的阻力,获得机构阻力与其运动速度的关系;然后,将机构置于波浪面下,水翼在波浪作用下产生推力使整个机构前进,测得机构的水平运动的平均速度、水翼的纵摇角度及升沉幅度,由于此时机构运动的阻力等于水翼产生的推力,因此,根据上一步阻力与速度关系应用此时平均速度值获得机构的阻力,从而得到此时水翼的推力。数值计算中其他参数如翼升沉幅度、纵摇角度、相位差等与文献[15]中结果相同,同时保持翼的运动频率与波浪的遭遇频率相等。
以上试验中水翼的运动虽然是被动的,但采用相同运动参数下的主动运动翼来获得其性能的数值计算方法也证明的可行的。同时假设试验中,水翼随波浪的摇荡及升沉运动符合正弦函数。计算中的稳定来流速度设定为与机构的平均前进速度相等,计算域设置及网格如图2和图3所示。
本文计算结果与试验值比较如图4所示,其中:纵坐标为推力的无因次值,横坐标为波数与翼 弦长的乘积,图中亦给出了WU[13],GRUE等[16]及DE SILVA等[5]的计算结果作为比较。从图4可知:在大波长(小)下,4种理论计算方法均与试验值吻合良好,但在小波长(大)下,只有本文计算结果仍能与试验值符合良好,证明文中所用的数值计算方法对所研究问题的有效性。其他方法与试验值差别的主要原因是计算方法中对流体黏性的忽略及湍流模型的选择。
1—实验值;2—WU;3—GRUE;4—YAMAGUCHI;5—计算值。
图4 不同下无因次推力比较
Fig. 4 Comparison of non-dimensional thrust between experiment and theory
3 计算结果与分析
基本工况的参数设置如下[5]:数值水池总长=25 m,造波区长1=15 m,消波区长2=10 m,水深w=3 m,空气域高h=2 m,水平流速=0.1 m/s,波高1==0.04 m,波长=6.64 m;翼型NACA0012,弦长=0.1 m;沉深h=0.1 m;翼摇摆与升沉相位差=90°,摇摆运动领先;波翼相位差=−90°,翼运动领先;翼周期=2 s= 1/=2π/;升沉幅度0=0.5;最大摆幅角θ=15°;遭遇频率=。
3.1 水翼摇荡与升沉相位差对水翼性能的影响
已有研究表明,处于无界流中水翼摇荡与升沉的相位差对其推力及效率有重要影响[20]。1个周期内不同环境下不同时刻水翼瞬时推力系数t及升力系数l变化分别如图5和图6所示,图中亦给出水翼在无界流中及近静水面时的系数作为比较。本节中所述相位差为水翼纵摇领先升沉的相位差。
由图5可以得出:不同环境下,水翼t在1个周期内均连续变化2次,出现2个极大值。对t的影响表现在对t的变化幅度上,越小,t随时间变化越剧烈;也表现在t峰值的出现时刻上,随着的增大,t峰值出现时刻逐渐向时刻及+/2时刻偏移。而由图6可知:1个周期内水翼的l连续变化1次,有1个极大值;对l的影响与其对t的影响相似。此外,综合图5和图6,对比处于无界流及近波面、近静水面水翼系数可知,波面的存在主要增加了水翼力学系数变化的幅值而对其变化规律没有影响;对比无界流中水翼,静水面的存在对力系数的变化影响不大。
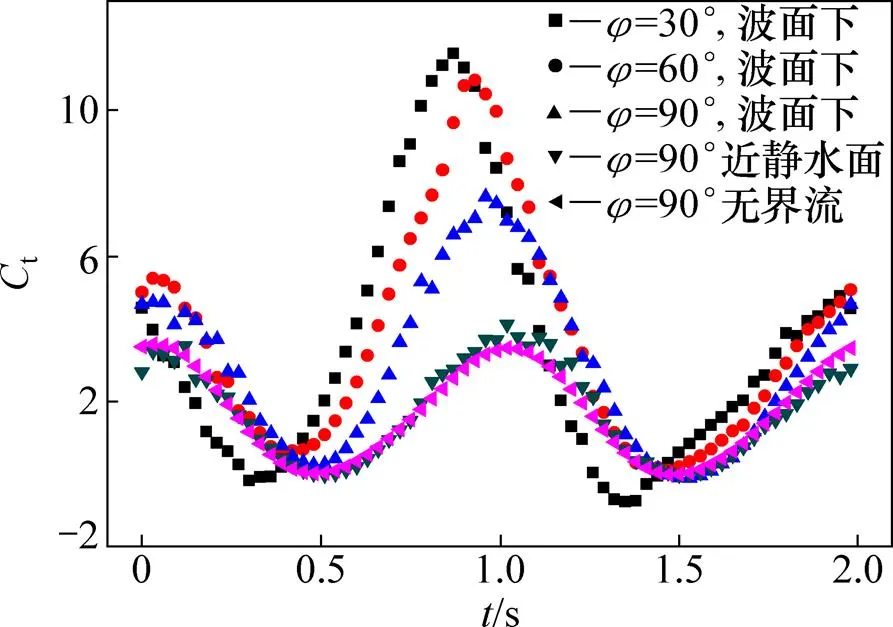
图5 Ct随相们差φ的变化
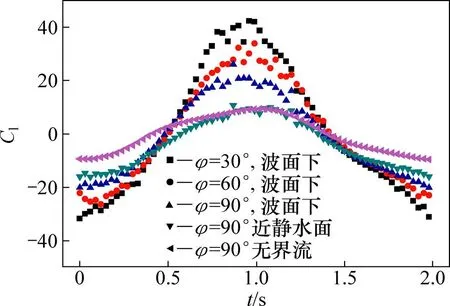
图6 Cl随相位差φ的变化
对不同环境下水翼平均推力系数T、波浪回收功率pr、水翼推进效率以及波浪能回收效率η的影响曲线分别如图7和图8所示。由图7可知:不同环境下,水翼T均随着的增加呈先增后减趋势,各曲线均在≈60°时取得最大值,而当>150°时,各种环境下水翼将不再产生推力;不同时,水翼产生正推力时均是有波条件下最高,表明对近波面水翼推力的产生亦有十分重要的影响,当选择恰当时,波面对水翼推力的产生有增加作用,且在=60°波面增加作用最大;而当选择不当时,波面的存在反而会使水翼阻力迅速增加。同时由图5可知:的变化对处于2种环境下水翼T差别影响不大。另外,近波面水翼pr随变化平缓,且在≈60°水翼能够从波浪中获得最大功率。由图8可知:与r均随着的增加而先增后减,不同环境下均在≈90°取得最大值。多数情况下,均有处于无界流中水翼最高,而波面下水翼略高于其处于静水面下时情况。结合图7可知:水翼在波面下运动时,选择恰当的能够有效提高水翼的推力及推进效率,而选择不当的反而会使推力及效率减小甚至为负;同时对处于波面下及静水面下时产生推力的差值影响较大,而对2种情况下水翼的效率差值影响很小。
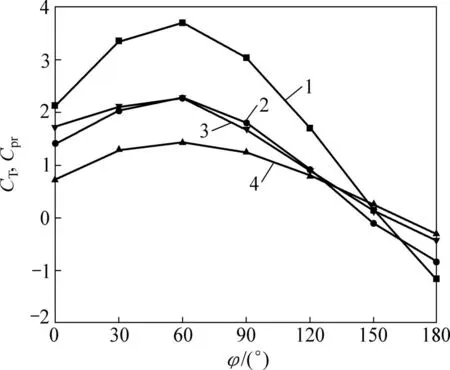
1—波面下T;2—近静水面T;3—无界流T;4—pr。
图7T和pr随相位差的变化
Fig. 7 Change of average thrustTand wave power recoveryprwith phase difference between heave and pitch
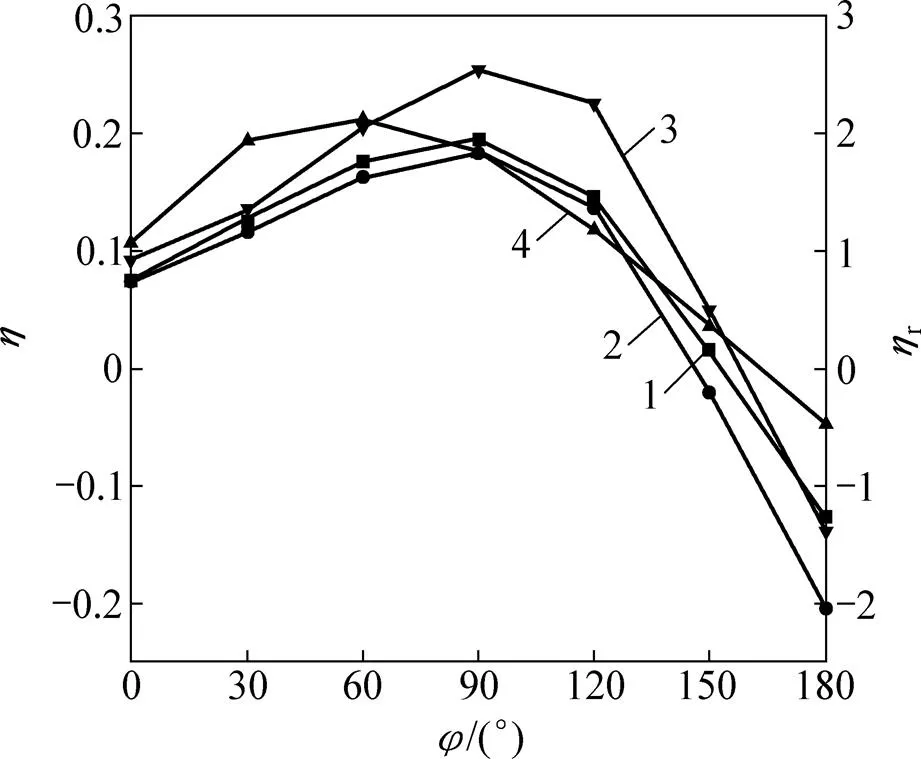
1—波面下;2—近静水面;3—无界流;4—r。
图8和r随的变化
Fig. 8 Change of wave energy recoveredand propulsive coefficientsrwith phase difference between heave and pitch
水翼在运动时,其脱落的尾涡在流场中呈反卡门涡街形式排列,使得翼后方形成喷射状态的流体,在具有较大动量流体的反作用下,水翼受到前进的推力,因此尾涡情况对翼推进性能具有极其重要的影响。为深入了解不同环境下、不同时水翼水动力性能差别的根本原因,给出了不同环境中水翼1个周期内不同时刻翼附近涡系变化如图9所示。
由图9可知:在+2/4时刻,明显=60°水翼尾涡分布范围更小、梯度更高,且在=90°下水翼出现了较大梯度的首缘涡,此时对应图5中=1s时=60°下水翼瞬时推力要大幅高于=90°时情况;同时不同时刻均有=60°时水翼尾涡压力梯度更高,从而对应图7中=60°时水翼平均推力大于=90°时推力,此外,=90°下水翼的尾涡分布范围较小,故能有效减少涡系能量的耗散,提高水翼推进效率,对应图8中=90°下水翼推进效率高于=60°时效率。与水翼近静水面运动相比,波面的存在使得水翼尾涡梯度增加较大,而分布范围变化不大,对应波面下水翼平均推力高于其处于静水面下,表明波面的存在有利于增加水翼尾涡梯度,增大翼推力。无界流中水翼尾涡分布范围更小,但涡系梯度不大,导致其效率虽高但推力较小。综合上述,恰当的下,波面的存在既可有效提高水翼的推力,又能增加近自由液面运动水翼的推进效率。
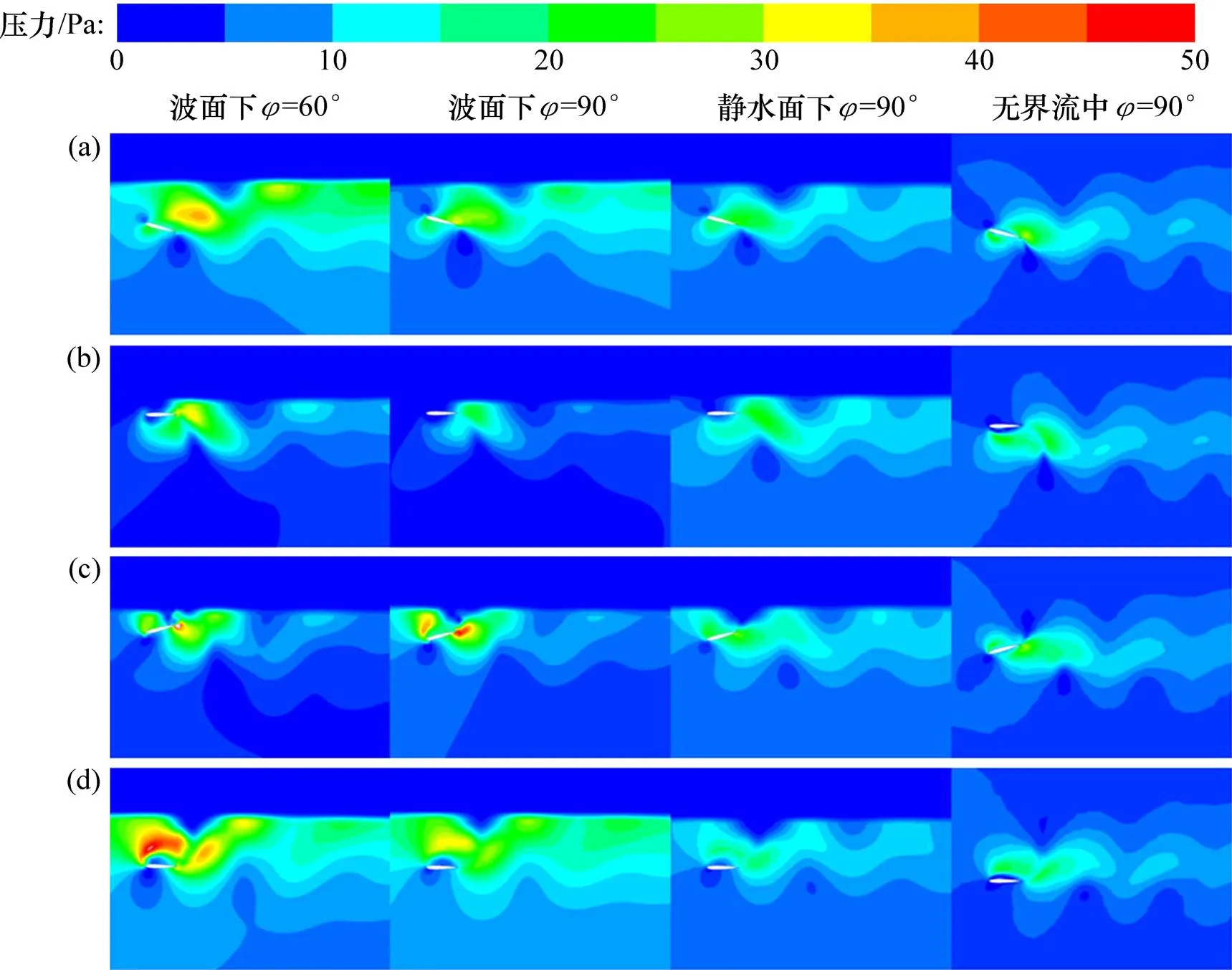
(a);(b)+/4;(c) T+2/4;(d)+3/4
图9 1个周期内不同时刻不同环境下水翼表面动压力分布
Fig. 9 Dynamic pressure distribution of foil at different time in one period with different surroundings
3.2 水翼摆幅角对水翼性能的影响
水翼在不同环境下绕轴纵摇运动的摆幅角0对其平均推力系数T、波浪回收功率pr和水翼推进效率、波浪能回收效率r的影响曲线分别如图10和11所示。
从图10可知:随着0的增大,T及pr均逐渐增大。表明增加摆幅角能够有效增加各种环境下水翼的推力,且水翼大摆角运动有利于其获取更多的波浪功率。同时,近波面翼所产生的推力与静水面下及无界流中翼推力之差亦随着0的增大而增大,表明增大摆幅角对近波面水翼推力的增加效果更明显。而由图11可知:大的摆幅角时水翼的及r越高,表明增加摆幅角能够有效提高水翼对波浪能的利用能力。此外,对于无界流中水翼而言,随着0的增加,其增加速率趋缓,与近波面水翼逐渐接近,表明大的摆幅角下,水翼受波面作用,在保证获得较大推力的情况下,其效率亦可接近甚至超过其处于无界流中时情况。同时0越大,近波面翼高出其近静水面时越多。
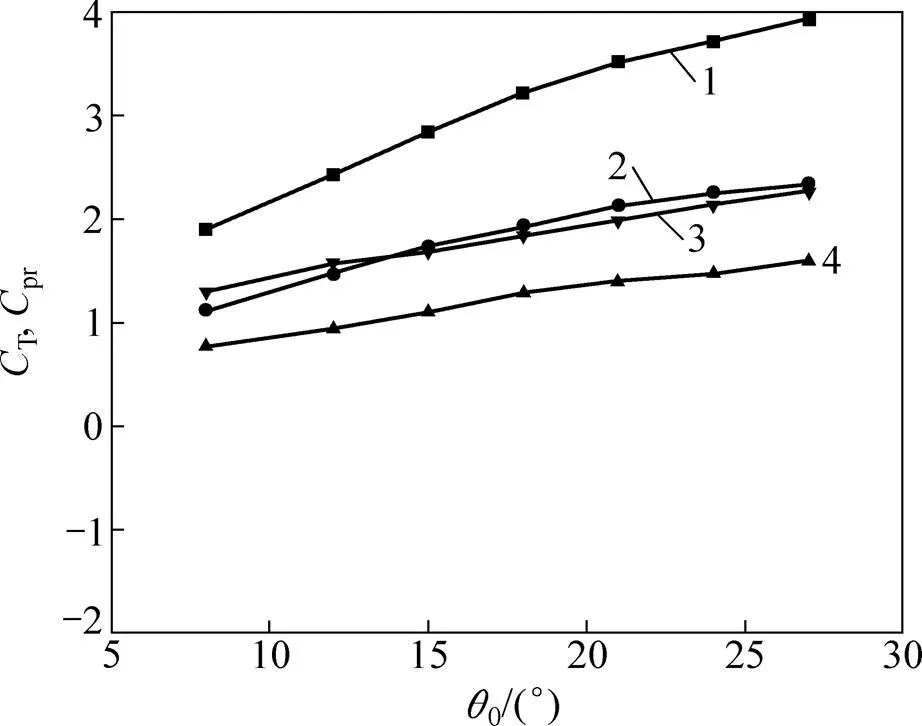
1—波面下T;2—近静水面T;3—无界流T;4—pr。
图10T和pr随0的变化
Fig. 10 Average thrustTand wave power recoveryprversus pitch amplitude0
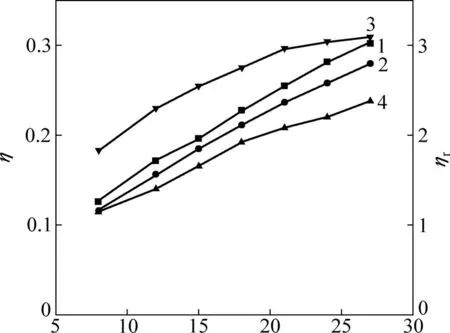
1—波面下;2—近静水面;3—无界流;4—r。
图11和r随0的变化
Fig. 11 Wave energy recoveredand propulsive coefficientsrversus pitch amplitude0
3.3 水翼升沉幅度对水翼性能的影响
当水翼运动周期确定情况下,升沉幅度不同即为翼垂向运动速度的不同。为保证水翼在不同升沉幅度下的整个运动过程均在同一流体介质中,设定水翼沉深h=0.12 m,其他参数则与基本工况设置一致。计算得到不同无因次升沉幅度0/下水翼平均推力系数T、波浪回收功率pr和水翼推进效率、波浪能回收效率r变化曲线分别如图12和13所示,图中亦给出水翼在无界流中及近静水面时的系数作为比较。
由图12可知:近波面、近静水面及无界流中水翼的T均是随着0/的增大而增加,且任意升沉幅度下有波面存在时的水翼推力均高于其他2种情况,表明水翼升沉幅度的增加及运动翼上方波面的存在均有利于水翼推力的产生,同时相比较于无界流中情况,静水面的存在会使水翼T有极小幅度的增加。由图13可知:各种环境下水翼的均是随0/的增大而减小,且不同0/下均是无界流中水翼效率最高,有波浪存在情况时次之,静水面下翼效率最低,表明波面及静水面的存在使得水翼运动时克服升力及力矩所做功增幅大于翼推力增幅,但由于近波面水翼能够有效利用波浪能,故使得近波面翼效率要高于近静水面时情况;而随着0/的增加,近波面与近静水面水翼差距逐渐减小,结合图12中2种环境下水翼推力差距增大,表明随着0/的增大,与静水面下相比,波面的存在使得驱动水翼运动总功的增加更为迅速。同时综合图12和图13可知:近波面水翼的pr及r随着升沉幅度的增大而以近线性方式增加,表明固定波浪形式下,大升沉幅度运动有利于水翼获取更多的波浪能量。
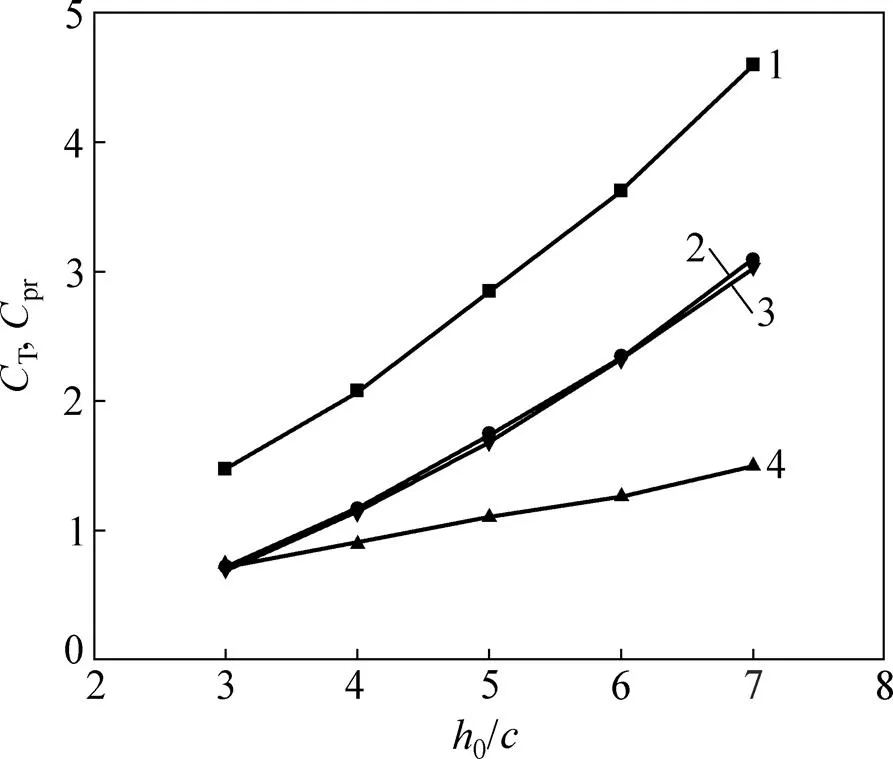
1—波面下T;2—近静水面T;3—无界流T;4—pr。
图12T和pr随0/的变化
Fig. 12 Average thrustTand wave power recoveryprversus non-dimensional submergence0/

1—波面下;2—近静水面;3—无界流;4—r。
图13和r随0/的变化
Fig. 13 Wave energy recoveredand propulsive coefficientsrversus non-dimensional submergence0/
4 结论
1) 水翼近波面运动时,摇摆与升沉间的相位差主要影响水翼瞬时力系数的幅值及峰值出现的时刻;与水翼近静水面运动相比,波面的存在增加了瞬时力系数的幅值而对其变化规律没有影响;与无界流相比,静水面的存在则对力系数变化影响不大。
2) 摇摆与升沉相位差为60°时,不同环境下水翼推力取得最大值,而当相位差为90°时,不同环境下水翼推进效率取得最大值。相位差为60°时,尾涡梯度更大,而相位差为90°时尾涡的分布范围更小。同时相位差为60°时,近波面水翼吸收最大的波浪功率,获得最高的波浪能利用效率。
3) 水翼在大摆幅角下能够获得更大的推力、更高的推进效率,同时增加摆幅角有利于提高近波面运动水翼对波浪能的利用能力;而水翼升沉幅度越大,其推力越大、效率越低,大升沉幅度运动有利于水翼吸收更多的波浪能。
[1] 苏玉民, 万磊, 李晔, 等. 舵桨联合操纵微小型水下机器人的开发[J]. 机器人, 2007, 29(2): 151−154. SU Yumin, WAN Lei, LI Ye, et al. Development of a small autonomous underwater vehicle controlled by thrusters and fins[J]. Robot, 2007, 29(2): 151−154.
[2] TRIANTAFYLLOU M S, HOVER F S, TECHET A H, et al. Review of hydrodynamic scaling laws in aquatic locomotion and fishlike swimming[J]. Applied Mechanics Reviews, 2005, 58(4): 225−237.
[3] XIAO Qing, ZHU Qiang. A review on flow energy harvesters based on flapping foils[J]. Journal of Fluids and Structures, 2014, 46(4): 174−191.
[4] BØCKMANN E, STEEN S. Experiments with actively pitch-controlled and spring-loaded oscillating foils[J]. Applied Ocean Research, 2014, 48: 227−235.
[5] DE SILVA L W A, Yamaguchi H. Numerical study on active wave devouring propulsion[J]. Journal of Marine Science and Technology, 2012, 17(3): 261−275.
[6] NAITO S, ISSHIKI H. Effect of bow wings on ship propulsion and motions[J]. Applied Mechanics Reviews, 2005, 58(4): 253−268.
[7] CHENG J Y, ZHUANG L X, TONG B G. Analysis of swimming three dimensional waving plate[J]. Journal of Fluid Mechanics, 1991, 232: 341−355.
[8] 程健宇, 庄礼贤, 童秉纲. 三维变幅波板的游动[J]. 水动力学研究与进展: A辑, 1991, 6(S1): 1−11. CHENG Jianyu, ZHUANG Lixian, TONG Binggang. Swimming of three-dimensional waving plate with variable amplitude[J]. Journal of Hydrodynamics A, 1991, 6(S1): 1−11.
[9] JONES K D, PLATZER M F. Numerical computation of flapping-wing propulsion and power extraction[C]//35th Aerospace Science Meeting and Exhibit. NV: AIAA, 1997: 1−16.
[10] PLATZER M F, JONES K D, YOUNG J, et al. Flapping wing aerodynamics: progress and challenges[J]. AIAA Journal, 2008, 46(9): 2136−2149.
[11] 苏玉民, 黄胜, 庞永杰, 等. 仿鱼尾潜器推进系统的水动力分析[J]. 海洋工程, 2002, 20(2): 54−59. SU Yumin, HUANG Sheng, PANG Yongjie, et al. Hydrodynamic analysis of submersible propulsion system imitating tuna-tail[J]. The Ocean Engineering, 2002, 20(2): 54−59.
[12] 刘鹏, 苏玉民, 刘焕兴, 等. 串列异步拍动翼推进性能分析[J]. 上海交通大学学报, 2014, 48(4): 457−463. LIU Peng, SU Yumin, LIU Huanxing, et al. Propulsive performance analysis of tandem asynchronous flapping foil[J]. Journal of Shanghai Jiaotong University, 2014, 48(4): 457−463.
[13] WU T Y. Fish swimming and bird/insect flight[J]. Annual Review of Fluid Mechanics, 2011, 43: 25−58.
[14] ISSHIKI H. A theory of wave devouring propulsion: 1st report[J]. Journal of the Society of Naval Architects of Japan, 1982, 151: 54−64.
[15] ISSHIKI H, MURAKAMI M. A theory of wave devouring propulsion: 4th report[J]. Journal of the Society of Naval Architects of Japan, 1984, 156: 102−114.
[16] GRUE J, MO A, PALM E. Propulsion of a foil moving in water waves[J]. Fluid Mech, 1988, 186: 393−417.
[17] 刘鹏, 苏玉民, 李宁宇. 波翼相位差对柔性翼水动力性能的影响[J]. 哈尔滨工程大学学报, 2016, 37(3): 313−319.LIU Peng, SU Yumin, LI Ningyu. Effects of wave phase difference on the hydrodynamic performance of a flexible flapping foil[J]. Journal of Harbin Engineering University, 2016, 37(3): 313−319.
[18] ANDERSON J M, STREITLIEN K, BARRETT D S, et al. Oscillating foils of high propulsive efficiency[J]. Journal of Fluid Mechanics, 1998, 360: 41−72.
[19] LIU P, SU Y, LIAO Y. Numerical and experimental studies on the propulsion performance of a Wave Glide propulsor[J]. China Ocean Engineering, 2016, 30(3): 393−406.
[20] ZHANG Xi, SU Yumin, WANG Zhaoli. Numerical simulation of the hydrodynamic performance of an unsymmetrical flapping caudal fin[J]. Journal of Hydrodynamics, 2012, 24(3): 354−362.
(编辑 赵俊)
Effect of kinematic parameters on propulsion performance of flapping foil
LIU Peng, SU Yumin, LI Hongwei
(Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University, Harbin 150001, China)
The effect of kinematic parameters on the propulsion performance of 2D rigid flapping foil nearby the wave surface was studied. At first, the numerical model of foil under the waves was built based on the computational fluid dynamic (CFD) technique. Then, using wave-generated by velocity inlet boundary method and dynamic mesh technology, both the motions and hydrodynamic performances of foil were simulated and analyzed. The performances of foils which were in infinite fluid and nearby the calm water surface were calculated and compared. The results show that the thrust, propulsive efficiency and the wave devouring efficiency of foil can be maximum when the phase difference between pitch and heave is appropriate. The wake can increase the gradient of foil’s wake vortex and decrease its range when the foil was near the wave surface or with the favorable phase difference between pitch and heave. As a result, the thrust and propulsive efficiency can be improved. In addition, it is beneficial to increase the thrust at larger pitch angle or heave amplitude and higher efficiency can get at larger pitch angle or smaller heave amplitude.
regular wave; flapping foil; kinematic parameters; wake vortex; propulsion performance
10.11817/j.issn.1672-7207.2016.12.015
U661.43
A
1672−7207(2016)12−4062−08
2015−12−05;
2016−03−09
国家自然科学基金资助项目(51479039,51609220);中国博士后科学基金资助项目(2013M540271);中央高校基本科研业务费专项资金资助项目(HEUCFD1403);黑龙江省博士后经费资助项目(LBH-Z13055)(Projects(51609220, 51479039) supported by the National Natural Science Foundation of China; Project(2013M540271) supported by China Postdoctoral Science Foundation; Project(HEUCFD1403) supported by the Basic Research Foundation of Central Universities; Project(LBH-Z13055) supported by Heilongjiang Provincial Postdoctoral Financial Assistance)
刘鹏,博士,讲师,从事流体力学、仿生物水下推进技术研究;E-mail:pengliu@ouc.edu.cn
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
海洋技术学报(2021年3期)2021-08-19
数字海洋与水下攻防(2020年5期)2021-01-04
水道港口(2020年6期)2020-02-22
当代陕西(2020年24期)2020-02-01
扬子江(2019年5期)2019-09-23
舰船科学技术(2019年4期)2019-05-16
中学教学参考·理科版(2018年7期)2018-10-20
中文信息(2018年2期)2018-05-30
中国航海(2014年1期)2014-05-09