
三轴磁传感器误差分析与校准
2017-02-10 00:35卞鸿巍王荣颖苏瑞祥
舰船电子工程 2017年1期
陈 雷 卞鸿巍 王荣颖 苏瑞祥
(1.海军工程大学导航工程系 武汉 430033)(2.海军青岛航保修理厂 青岛 266000)
三轴磁传感器误差分析与校准
陈 雷1卞鸿巍1王荣颖1苏瑞祥2
(1.海军工程大学导航工程系 武汉 430033)(2.海军青岛航保修理厂 青岛 266000)
针对传统使用磁性物质对磁传感器误差补偿繁琐、精度不高;多位置标定法对设备要求高等难题。论文在分析磁传感器各项误差的基础上,建立误差模型;根据磁传感器误差模型证明了磁传感器数据分布在椭球面这一假设,进而在椭球约束的前提下利用最小二乘拟合方法,求取误差参数,对磁传感器各项误差予以补偿,实验结果表明,该标定方法能够有效地补偿磁传感器硬磁干扰、软磁干扰、零偏、非正交误差、刻度因数等误差项。
磁传感器; 误差模型; 椭球拟合; 标定补偿
Class Number TP212.13
1 引言
由于地球磁场强度比较稳定,在加速度计提供载体俯仰角和横滚角的前提下,通过磁传感器输出的三轴的磁场强度,可以解算出航向角。磁传感器的测量值会受载体环境硬磁和软磁干扰,同时存在零偏、非正交和刻度因数等误差[1]。为了获取更加精确的航向信息,需要对磁传感器进行误差补偿。传统的补偿方法为硬补偿,即在传感器周围放置硬磁、软磁等来抵消载体硬软磁干扰,但是这种存在方法比较繁琐、精度较低等问题;也有学者使用多位置标定方法,但是需要找到磁北,对设备要求较高[2~3]。本文针对磁传感器硬磁干扰、软磁干扰及磁传感器器件误差,建立磁传感器误差模型[4],通过椭球拟合的方法对磁传感器进行标定补偿,能够有效地补偿磁传感器各项误差。
2 磁传感器误差建模
磁传感器误差主要为硬磁干扰、软磁干扰和器件误差即零偏、非正交误差、和刻度因数。
2.1 硬磁干扰和软磁干扰
当硬磁材料被磁化后会产生一个固定的磁场,即使周围的磁场的强弱和方向发生变化后,这个固定磁场依旧不会发生变化。由于硬磁干扰对磁传感器输出的三轴矢量是恒定的[5],则磁传感器受硬磁干扰的输出可表示为
H1=He+Hh
(1)
其中H1为磁传感器在受到硬磁干扰后的测量值,He为磁传感器敏感到的三轴地磁场矢量,Hh为硬磁对磁传感器测量值的影响。
载体上软磁材料可以看成由载体X,Y,Z三个方向软磁材料组成,各轴向的软磁材料分别受到三轴地磁场分量的磁化,对磁传感器产生三个方向的软磁干扰。软磁干扰与软磁材料的数量、质量和磁传感器与载体的相对位置有关[6]。表1为磁传感器各轴向受到的软磁干扰的误差模型。

表1 软磁干扰误差模型

载体软磁材料受到地磁场磁化后产生的磁干扰为Hs,则磁传感器受软磁干扰的输出模型可表示为
(2)
故磁传感器受到硬磁和软磁干扰的误差模型可表示为
(3)其中
Hm为磁传感器受硬磁和软磁干扰后的输出。
2.2 磁传感器器件误差
磁传感器非正交误差是在传感器制造过程中三个敏感轴偏离了理想互相垂直的轴向。令磁传感器理想正交坐标系为OXYZ,磁传感器实际的三轴非正交坐标系为OX1Y1Z1,假设OXZ平面与OX1Z1平面重合且OZ轴与OZ1轴重合,OX1轴在OXZ平面与OX轴的夹角为α,OY1轴在OXY平面上的投影与OY1轴的夹角为β,此投影与OY的夹角为γ,则磁传感器的非正交误差模型可表示为
(4)
(5)
式中Lx、Ly、Lz为磁传感器X、Y、Z轴的刻度因数。
同时磁传感器还存在三轴零偏He0,综合以上所有讨论到的磁传感器的误差,可将磁传感器输出表示为
H=K1K2Hm+He0
(6)
其中
结合磁传感器硬磁和软磁干扰误差,即式(3),可得:
H=K1K2EHe+(K1K2Hh+He0)=PHe+Q
(7)
其中
(8)
3 基于椭球假设的磁传感器标定
若将磁传感器在空间以任意姿态角旋转,磁传感器输出数据分布在一个中心在原点,半径为C的标准球面上[7~8]。但是实际应用中由于磁传感器受到各种误差的影响,使得磁传感器测量的数据点不再处于这个标准球面上。椭球假设是指当磁传感器处于磁环境比较稳定的载体中受到硬磁、软磁和零偏、刻度因数、非正交误差等影响后,磁传感器输出数据分布在一个中心偏离坐标系原点的椭球上。
根据式(7)可以得到磁传感器误差模型的二次型,如式(9)所示:
HTH=HePTPHe+HePTQ+QTPHe+QTQ
(9)
由式(9)可知,若PTP满足严格对角占优条件,则为正定矩阵,可以得出HTH为椭球面,由式(8)知P具体的表示形式:
(10)
矩阵K1中的元素Lx,Ly,Lz为传感器的刻度因数都趋近于1,而且K1为对角矩阵,故矩阵K1是正定矩阵;由于非正交角度为比较小的角度,即α,β,γ为小角度,则cosα,cosβ,cosγ趋近于1,而sinα,sinβ,sinγ趋近于0,故矩阵K2为一严格对角占优正定矩阵;根据文献[9]可知,软磁干扰矩阵中的元素hxx,hxy,hxz,hyx,hyy,hyz,hzx,hzy,hzz均为较小量,则矩阵E为严格对角占优正定矩阵。综上对矩阵P的分析可知其为严格对角占优正定矩阵,则PTP为严格对角占优正定矩阵,从而证明了椭球假设的正确性。
以实际所有采集到的数据点与椭球面的距离平方和最小为判定原则,利用最小二乘法对磁传感器输出数据进行椭球拟合[10~11]。确定拟合后椭球面的参数,根据椭球面参数求解误差参数,从而对磁传感器进行校准。
磁传感器测量的三轴磁场矢量Hx,Hy,Hz,经过拟合后满足椭球面方程:
ax2+by2+cz2+dxy+eyz+fxz+mx+ny+tz=1
(11)
其中a,b,c,d,e,f,m,n,t为椭球面参数。
将椭球面方程表示成矢量形式:
(X-X0)TA(X-X0)=1
(12)
可得:
HTAH-2H0TAH+H0TH0=1
(13)
根据磁传感器的误差模型,可得其误差补偿模型为
He=P-1(H-Q)
(14)
对He取模可得:

(15)
对式(15)作等效变换可得:
(16)
对比式(12)和式(16)可得误差参数;
(17)
在求得误差参数的基础上结合误差补偿模型,即式(14)可对磁传感器的输出进行补偿。
4 实验验证
将一小铁块和磁传感器固定在木板上,这样是为了使磁传感器受到硬磁干扰和软磁干扰。采集磁传感器在空间任意姿态下的数据,根据椭球拟合标定方法解出误差参数P和Q,根据误差补偿模型对磁传感器输出的数据进行补偿。
将实验测得的磁传感器的数据和误差标定补偿后的数据进行对比,如图1所示,可以看出原始数据处于一个中心点偏离坐标原点的椭球面上,而经过误差补偿后的数据分布在中心基本位于坐标原点的球面上。
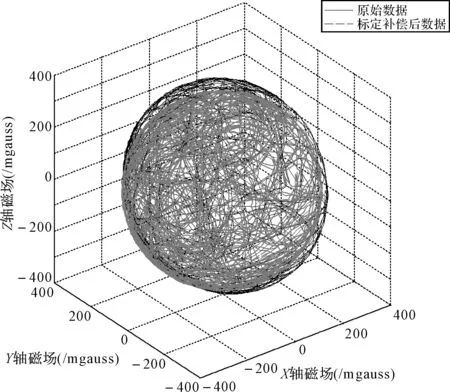
图1 标定补偿前后数据
为了更加清晰地反映误差标定补偿前后磁传感器数据所在曲面的中心,将标定补偿前后数据所在曲面分别投影在OXY、OXZ、OYZ平面,如图2~图4所示,可知标定补偿后的数据在三个平面上的中心点基本在坐标原点,而标定补偿前数据在平面上的中心点明显偏离坐标原点,从而可知磁传感器数据标定补偿后分布在中心基本在坐标原点的曲面上,而未经标定补偿的磁传感器的数据处于中心偏离坐标原点的曲面上。

图2 标定补偿前后数据
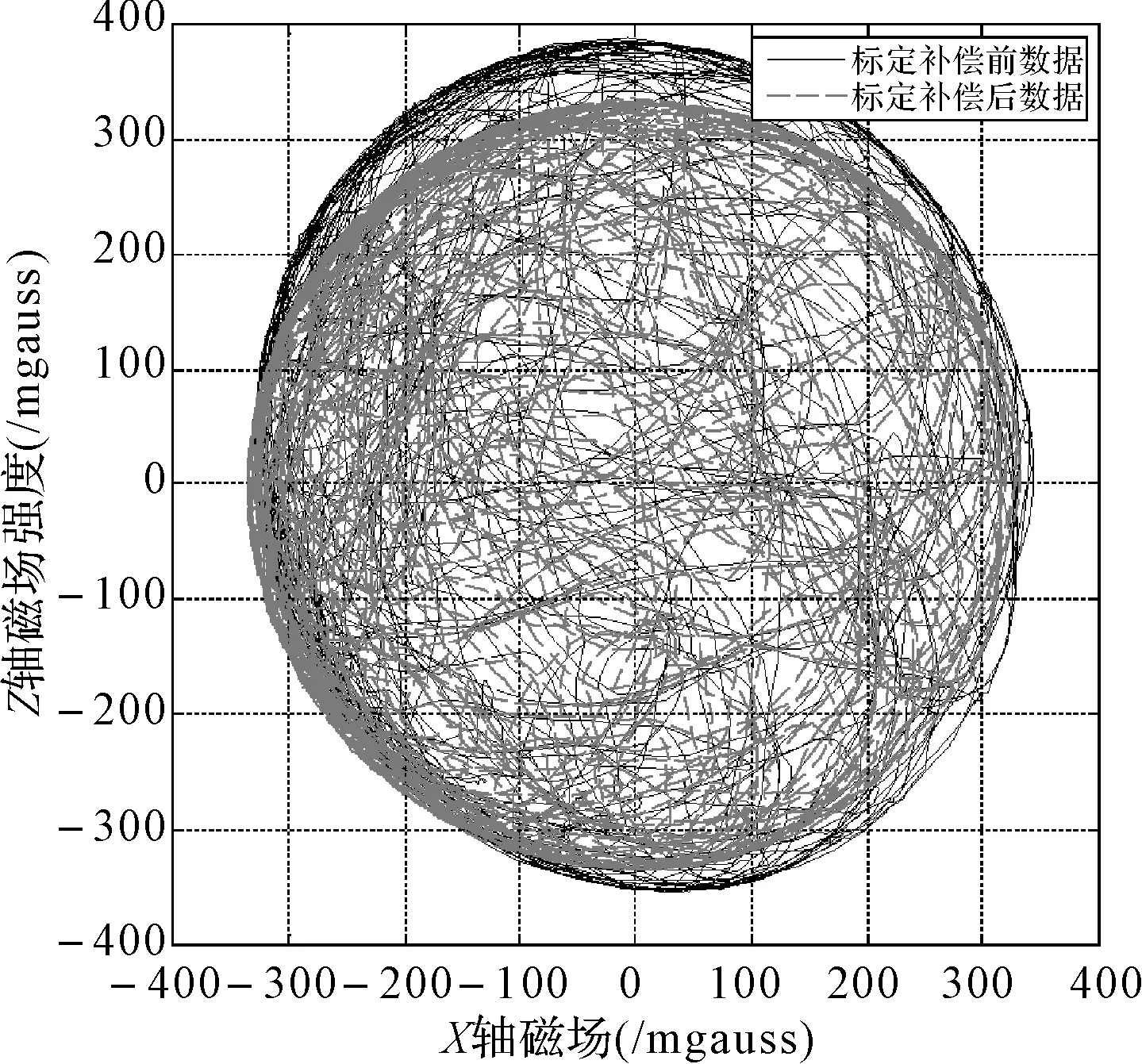
图3 标定补偿前后数据
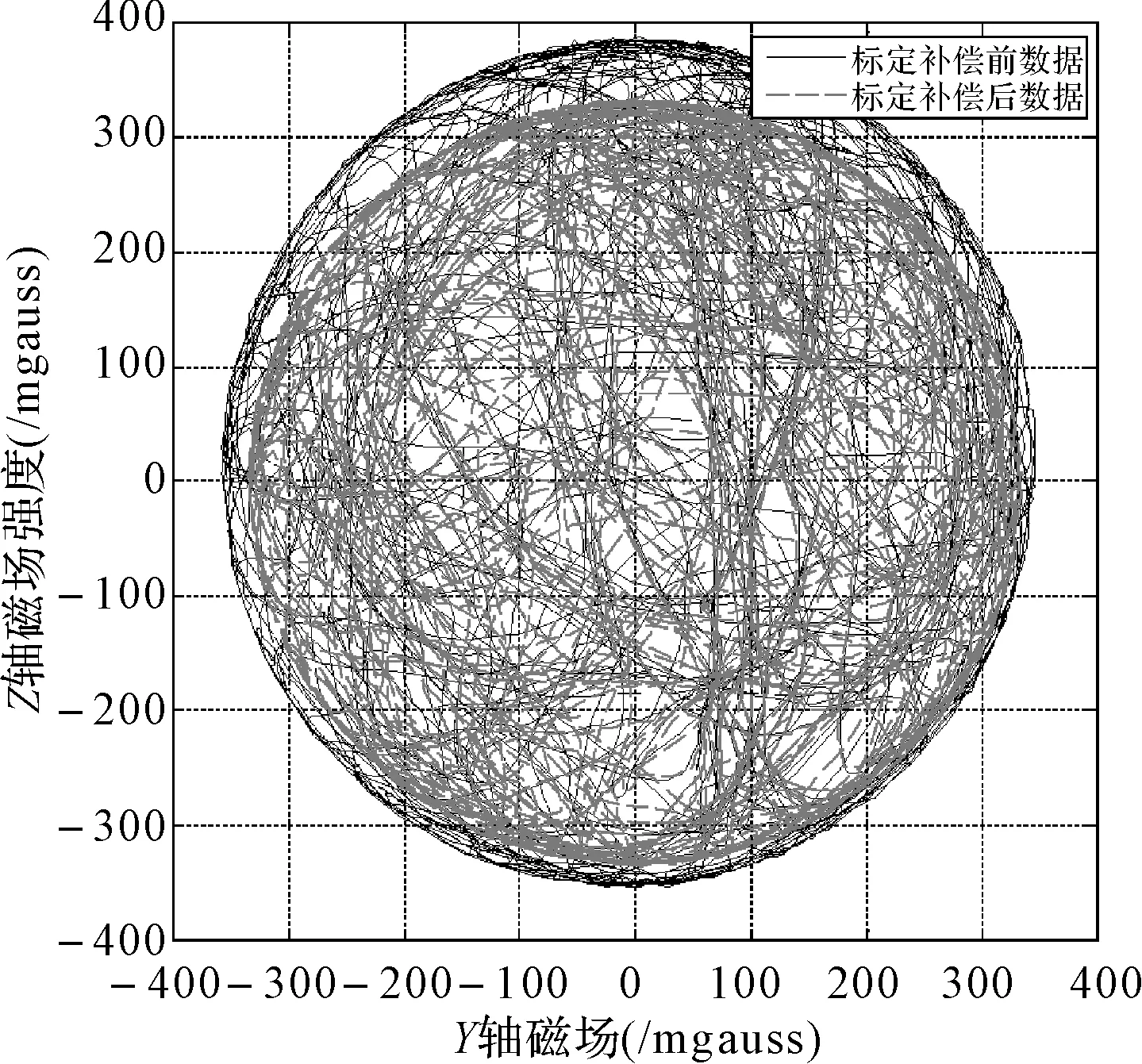
图4 标定补偿前后数据
图5为误差标定补偿前后磁传感器数据模值对比,可以看出标定补偿后磁传感器数据的模值波动小于磁传感器输出的原始数据模值的波动。磁传感器输出原始数据的模值方差为304.9089(mgauss2),磁传感器数据误差标定补偿后模值方差为1.7698(mgauss2)。可以得出磁传感器数据经标定补偿后基本处于球面上。
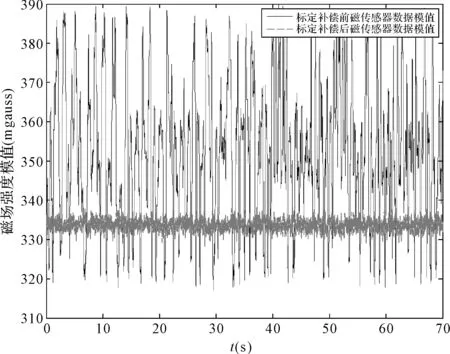
图5 标定补偿前后磁传感器数据模值
由以上对磁传感器误差标定补偿前后数据所处的曲面及曲面的中心分析,可得标定补偿后的磁传感器数据基本分布在球心在原点的球面上。
5 结语
本文分析磁传感器各项误差来源,建立误差模型,证明了磁传感器输出数据分布符合椭球这一假设,而后根据拟合后椭球面参数求取磁传感器误差参数,对磁传感器进行误差补偿。椭球拟合标定实验表明,该方法能够较好地校正由磁传感器零偏和硬磁干扰而引起的数据所在曲面的中心偏离坐标零点,以及由刻度因数、非正交、软磁干扰引起的球面发生畸变成椭球面。验证了该标定算法的有效性。
[1] 龙礼,张合.三轴地磁传感器误差的自适应校正方法[J].仪器仪表学报,2013,34(1):161-165.
[2] 林恒,魏莹莹,李保国.一种八位置数字磁强计系统误差标定方法[J].传感器与微系统,2011,30(3):87-89.
[3] 郭鹏飞,任章,邱海韬,等.一种十二位置不对北的磁罗盘标定方法[J].中国惯性技术学报,2007,15(5):598-601.
[4] 戴磊,齐俊桐,吴冲,等.旋翼飞行机器人磁罗盘误差分析及校准[J].机器人,2012,34(4):418-423.
[5] 李翔.航姿参考系统三轴磁强计校正的点积不变法[J].仪器仪表学报,2012,33(8):1813-1817.
[6] 赵琳,杨晓东.现代舰船导航系统[M].北京:国防工业出版社,2015.
[7] 练军想,唐康华.GNSS与惯导及多传感器组合导航系统原理[M].北京:国防工业出版社,2015.
[8] 陈国彬.弹载三轴磁测系统设计与误差标定补偿技术研究[D].太原:中北大学,2012.
[9] Moulin M, Goudon J C, Marsy J M, et al. Process for compensating the magnetic disturbances in the determination of a magnetic heading, and devices for carrying out this process: US, US 4414753 A[P].1983.
[10] Fitzgibbon, Pilu, Fisher. Direct least-squares fitting of ellipses[J]. IEEE Transactions on Patterns Analysis & Machine Intelligence,1996,1(5):253-257.
[11] Gander W, Strebel R, Golub G H. Least-squares fitting of circles and ellipses[J]. BIT,1994,34(4):558-578.
Three-axis Magnetic Sensor Error Analysis and Calibration
CHEN Lei1BIAN Hongwei1WANG Rongying1SU Ruixiang2
(1. Department of Navigation Engineering,Naval University of Engineering, Wuhan 430033) (2. Navy’s Navigation Warranty and Repair Plant of Qingdao, Qingdao 266000)
Aiming at the problems that the traditional methods use magnetic materials in magnetic sensor error compensation is trival, low precision, and multi position method of calibration requires higher precision equipment, in this paper, errors model is established on the basis of the analysis of the magnetic sensor errors, Based on this error model, a hypothesis that the magnetic sensor data distribution in a ellipsoid, using the least squares fitting method to calculate the ellipsoid parameters. On the premise of ellipsoid constraint, the error parameter is calculated and the error of magnetic sensors is compensated. The experiment result shows that the calibration method can effectively compensate the magnetic sensor errors which contain hard magnetic interference, soft magnetic interference, zero bias, nonorthogonal error, and scale factor.
magnetic sensor, error model, ellipsoid fitting, calibration and compensation
2016年7月19日,
2016年9月1日
国家自然科学基金资助项目(编号:41506220)资助。
陈雷,男,硕士研究生,研究方向:导航制导与控制。卞鸿巍,男,教授,博士生导师,研究方向:导航制导与控制。王荣颖,男,博士,讲师,研究方向:导航制导与控制。苏瑞祥,男,硕士,工程师,研究方向:惯导与平台罗经修理。
TP212.13
10.3969/j.issn.1672-9730.2017.01.010
猜你喜欢
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
矿山测量(2021年4期)2021-09-18
汽车电器(2021年8期)2021-08-24
南方农机(2021年12期)2021-07-08
大众投资指南(2020年10期)2020-07-24
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
北京航空航天大学学报(2017年3期)2017-11-23
