
舰载机偏置中线监视研究
2017-03-15 02:45田杰荣王月基史存虎
指挥控制与仿真 2017年1期
田杰荣,王月基,史存虎
(1.海军航空兵学院,辽宁 葫芦岛 125001;2.民航山西空管分局,山西 太原 030031)
舰载机偏置中线监视研究
田杰荣1,王月基1,史存虎2
(1.海军航空兵学院,辽宁 葫芦岛 125001;2.民航山西空管分局,山西 太原 030031)
中线摄像机是监视和引导舰载机进近着舰的重要设备,针对普通机场陆基着舰训练中线摄像机的部署问题,提出了在跑道侧方进行偏置监视的安置方法,建立了偏置中线监视的下滑道指示模型和误差模型,并利用MATLAB 进行了仿真分析。仿真结果表明:不同的安装位置会影响中线摄像机理想下滑道的指示角度以及指示精度,通过合理选取安装位置可满足监视要求,解决中线摄像机在普通机场的部署问题,提高舰载机陆基着舰训练效率。
舰载机;陆基着舰训练;中线监视;下滑道指示
舰载机在航空母舰着舰是一个十分复杂而又危险的飞行过程,飞行员需要借助着舰指挥员和相关引导设备才能顺利完成。中线摄像机是航空母舰上的一种引导设备,位于着舰跑道的中心线固定安装在跑道下方,用来监视舰载机进近着舰,可以提供舰载机与理想下滑道的水平和垂直角度偏差。基于偏差信息,可以辅助着舰指挥员形成决策,对下滑的舰载机实施着舰指挥。中线摄像机还可对舰载机下滑过程进行全程记录,为飞行员回顾下滑过程提供参考,并为着舰指挥官训练后讲评提供依据。
为降低上舰风险,节约训练成本,在允许舰载机飞行员在航空母舰上做着舰飞行之前,必须先进行陆基着舰训练(Field Carrier Landing Practice,FCLP)。在普通机场进行FCLP时,安装中线摄像机需要对跑道进行破坏性施工,或者把中线摄像机裸露在一种易于快速安装部署、显示效果良好且可以保证跑道中心线上,但这往往会影响飞行安全。因此,架设飞行安全的中线摄像机是FCLP的迫切需求。目前国内外主要针对航空母舰光电引导系统的设计、稳定技术、自动着舰和信息融合等[1-4]有深入研究,对航母中线电视监视系统设计和十字标线的稳定等也有研究[5-7],很少涉及普通机场训练条件下的着舰引导设备尤其是成本经济、使用方便、功能齐全的中线监视系统研究。
本文在分析航空母舰上舰载机中线监视原理的基础上,针对普通机场中线摄像机偏置安装的实际应用,建立了偏置中线监视模型,对安装位置约束条件、偏置中线下滑道指示及指示精度误差进行了详细的分析,利用Matlab对中线摄像机在不同安装位置对下滑道指示的影响进行了仿真。研究结果表明,在中线摄像机偏置的情况下,中线摄像机十字线指示的理想下滑道角度变化和指示精度具有明显的规律性,通过合理选取安装位置,可以解决中线摄像机在普通机场的部署问题。特别说明本文的普通机场是指可以供歼击机等飞机起降,没有专门为舰载机训练配置额外航空保障设备的机场。
1 舰载机中线监视原理
如图1所示,舰载机在航空母舰最后进近着舰时,采取保持迎角的方式,借助菲涅尔光学助降系统沿固定角度的下滑道完成拦阻着舰。OP为舰载机的理想下滑道,θ为下滑道的基准角,其大小一般为3.5°~4°,点O为舰载机的理想着舰点,通常位于第二根拦阻索[8]。
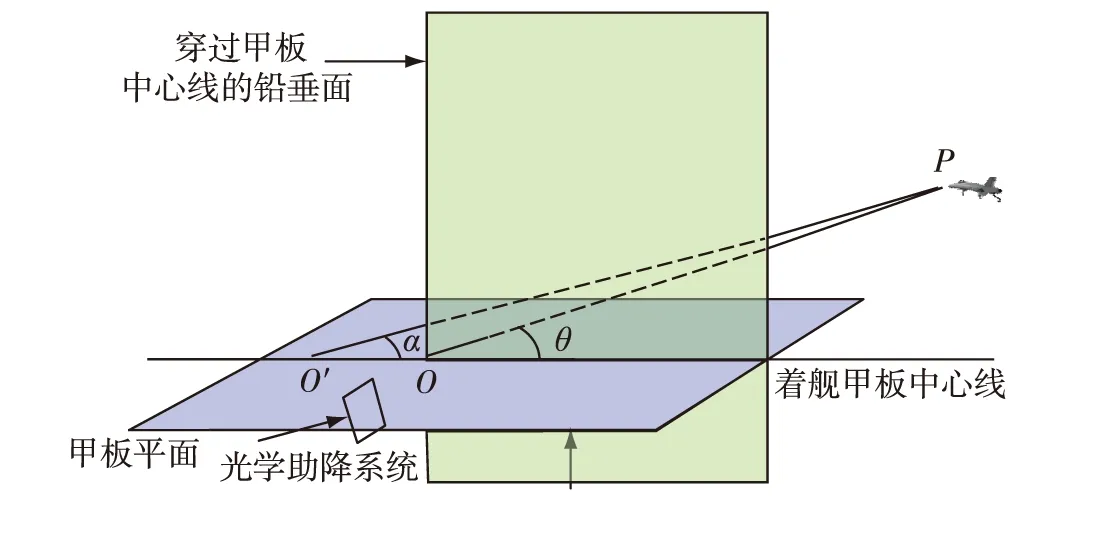
图1 舰载机着舰示意
中线摄像机安装在航母斜角甲板的中心线上,安装位置下陷,不影响舰载机着舰,O′为中线摄像机安装位置,距离理想着舰点大约100多米。如图2所示,中线摄像机通过提供叠加十字标线的中线合成视频来显示飞机的位置偏差信息,其中理想下滑道由十字标线指示,十字标线横坐标指示的角度就是α的角度。

图2 中线摄像机监视画面
由三角函数关系可得:
(1)
其中,L为舰载机与理想着舰点的距离,S为中线摄像机与理想着舰点的距离,由于θ和S为固定值,α只与L有关。
由于θ较小,当L≫S,α变化不明显,随着飞机接近理想着舰点,α会逐渐减小,直至为零,因此舰载机从下滑道入口点到理想着舰点过程中,中线摄像机十字标线的横坐标会发生变化,运动规律如图3所示。

图3 中线摄像机十字标线横坐标运动规律
2 偏置中线监视模型
2.1 安装位置约束条件
中线摄像机在跑道侧方安装时,在摄像机视场设计基本不变的条件下,要使其监视范围与摄像机中线安装时相一致,其安装位置受公式(2) 的条件约束,如图4所示。
(2)
其中M为中线摄像机与跑道中心线的侧方距离,φ为中线摄像机的水平视场角,φ为中线监视要求的水平视场角,通常情况下φ>φ。

图4 中线摄像机偏置安装示意
2.2 下滑道指示模型
如图5所示,O′点为中线摄像机安装位置,由于偏置安装,中线摄像机十字标线指示下滑道的俯仰角α、方位角β会与中线安装时不同。

图5 偏置中线监视示意
由三角函数关系可得:
(3)
(4)
式中,M、S为常数,即中线摄像机选取了固定位置,在不考虑摄像机性能的前提下,α、β只与舰载机与理想着舰点的距离L有关,实际工作中L由测距雷达测量。由公式(3)和(4)可知,随着L的减小,飞机接近理想着舰点,α和β均发生变化,对应于中线摄像机坐标系中的理想下滑道在俯仰和方位两个方向同时变化。
2.3 指示精度误差模型
下滑道指示精度是中线摄像机重要的技术指标,决定着舰机与理想下滑道之间的偏差估计。根据作用距离和图像处理的要求[9],要想实现在3km 处分辨率达到3m的精度,下滑道指示精度应达到1mrad,才能保证图像处理的正常实施。 中线摄像机的偏置安装,改变了中线系统原有的布局,需要重新评估对于指示精度的影响。
根据误差理论[10],对于
y=f(x1,x2,…xn)
(5)
函数系统误差Δy的近似计算公式为
(6)
α、β是关于L的常数(M、S为常数),L的测距误差会间接影响下滑道指示精度,α、β的误差估计为:
(7)
(8)
3 仿真分析
3.1 仿真条件
中线摄像机指标要求为:
作用距离≥5km;
水平视场≥7°(以跑道中心线为中心);
垂直视场≥2°(以理想下滑道为中心);
下滑道指示精度:2mrad(3σ)。
摄像机视场设计:水平视场8.9°,垂直视场6.5°。
测距雷达的测距精度:6m。
参考普通机场跑道边设备部署距离经验,采用距中心线不超过15m垂直距离,即取M=15,根据公式(2),可得
S≥14×12.853≈193
(9)
3.2 结果与分析
令S的变化范围为193~500,通过仿真,得出中线摄像机十字标线指示的俯仰角α、方位角β变化如图6所示,指示精度误差变化图如图7所示。

图6 线摄像机偏置指示角度变化
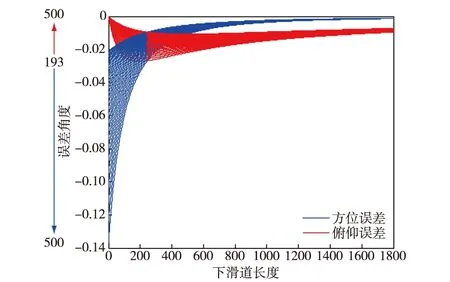
图7 中线摄像机偏置指示精度误差变化
如图6所示,中线摄像机的偏置安装会造成中线摄像机的俯仰视角和方位视角的变化,这与(3)、(4)的结论是一致的,且随着S的增大,α、β均有减小的趋势。
如图7所示,经分析计算得出中线下滑道方位指示误差随距离接近而增加,随着S的增大下滑道俯仰和方位指示误差均有减小的趋势。对于S=193,飞机距理想着舰点距离进入150m后,测距误差引起方位指示误差达到0.04°以上,引起的俯仰指示误差最大值为0.03°,均符合下滑道指示精度的要求。
3 结束语
舰载机飞行员和着舰指挥官的训练不同于一般的飞行员和指挥官,具有训练周期长、强度大、危险性高等特点。因此为提高飞行员和指挥官的成才率,提高飞行员的着舰成功率,壮大舰载机飞行员和着舰指挥官队伍,提高航母战斗力,在现有机场的基础上,建设一系列成本经济、使用方便、功能齐全的专门用于培训舰载机飞行员和着舰指挥官的着舰引导系统意义重大。本文以普通机场偏置部署中线摄像机为研究内容,通过建模与仿真分析了舰载机偏置中线监视对舰载机着舰引导的影响。结论表明,在中线摄像机偏置的情况下,其理想下滑道十字线指示精度可满足要求,本文的研究可以应用于下一步偏置中线监视系统的设计。
[1] 刘波,耿林. 舰载机的光电降落引导系统研究[J]. 激光与红外,2005,35(9):670-672.
[2] 吴文海,拜斌,范海震,等. 基于光电引导的全天候自动着舰模式研究[J]. 飞行力学,2013,31(2):126-129,134.
[3] 葛兵,高慧斌,余毅. 光电着舰引导系统的视轴稳定[J]. 光学精密工程,2014,22(6):1577-1583.
[4] 王杰,谭乐祖,毕波,等. 舰载机综合光电着舰引导信息融合[J]. 海军航空工程学院学报,2012,27(2):231-233.
[5] 赵建川,邵俊峰,王弟男,等. 航母中线电视监视系统的设计[J]. 中国光学,2012,5(6):625-629.
[6] 邵俊峰. 起降综合电视监视系统研究[J]. 光机电信息,2011,28(9):54-58.
[7] 潘永之,李玉和,刘东岳. 基于坐标变换的舰载电子十字线稳定方法[J]. 计算机测量与控制,2008,16(1):106-108.
[8] US Department of the Navy. NATOPS Landing Signal Officer Manual[Z]. VIRGINIA: Landing Signal Officers School Naval Air Station Oceana Virginia Beach, 2001.
[9] 王兵学,张启衡,刘玉清,等. CCD探测器搜索跟踪系统的作用距离分析[J]. 光电工程,2004,31(11):12-15,62.
[10]吴文旺. 系统误差传递公式的适用范围及其完善[J]. 石家庄铁道大学学报(自然科学版),1991,4(3):96-101.
Research on Offset Centerline Surveillance of the Carrier-based Aircraft
TIAN Jie-rong, WANG Yue-ji, SHI Cun-hu
(1.Naval Air Force Academy, Huludao 125001;2.Shanxi Air Traffic Management Branch of CAAC, Taiyuan 030031 Shanxi, China)
Centerline camera is an important equipment to monitor and guide the carrier-based aircraft into carrier deck. For deployment centerline camera in ordinary airport with field carrier landing practice, offset monitoring placement method is proposed in the side of the runway, slope indicator model and the error model of offset centerline monitoring is built, and the simulation analysis is carried out by MATLAB. Simulation results show that position of camera will affect the indication angle and indication accuracy of ideal glide in centerline camera, reasonable deployment can be selected to meet the monitoring requirements. The deployment of the centerline camera in the general airport is resolved. Training efficiency of field carrier landing practice is improved.
carrier-based aircraft; Field Carrier Landing Practice; centerline monitoring; slope indicator
2016-10-25
田杰荣(1982-),男,山西忻州人,硕士,讲师,研究方向为舰载机基础理论。 王月基(1974-),男,硕士,副教授。 史存虎(1962-),男,高级工程师。
1673-3819(2017)01-0037-04
V271.4+92;E917
A
10.3969/j.issn.1673-3819.2017.01.008
修回日期: 2016-11-20
猜你喜欢
智能计算机与应用(2022年9期)2022-09-28
现代电子技术(2022年18期)2022-09-17
汽车实用技术(2022年15期)2022-08-19
航天返回与遥感(2022年3期)2022-07-07
中国信息化(2022年5期)2022-06-13
中学生数理化·中考版(2021年9期)2021-11-20
科学技术创新(2021年25期)2021-09-11
安徽建筑(2020年11期)2020-11-23
名城绘(2020年5期)2020-10-14
活力(2018年18期)2018-01-14
