1P5R型管片拼装机构分析及设计
2017-03-30 18:46庄欠伟杨正
筑路机械与施工机械化 2017年3期
庄欠伟+杨正

摘 要:以宁波轨道交通3号线一期工程的类矩形盾构机为依托,分析了类矩形管片拼装的难点。利用机构学知识,综合传统圆形拼装机构和该工程管片的特点,创新研发了一种1P5R串联型拼装机。结合对该拼装机机构形式和结构原理的介绍,探讨其特点及优势:体积小,动作灵活,可以实现90°以上的姿态调整;既能够完成类矩形圆周管片拼装,又能完成大长度中立柱的拼装。
关键词:类矩形盾构机;1P5R型管片拼装机;长度空间比;中立柱
中图分类号:U455.43 文献标志码:B
文章编号:1000-033X(2017)03-0103-04
Abstract: Based on the rectangular shield machine for the first phase of Ningbo Rail Transit Line 3, the difficulties in assembling rectangular segments were analyzed. By using the knowledge of mechanism, traditional circular assembling mechanism and the characteristics of the segments, 1P5R, a tandem segment erector, was developed. The form and structural principle of the segment erector were introduced to discuss its characteristics and advantages: small volume, flexible movement, and is capable of making 90°of position adjustment. The segment erector applies to the assembly of both the rectangular-like pieces of circular tube and long columns.
Key words: rectangular shield machine; 1P5R segment erector; length-to-space ratio; center pillar
0 引 言
随着城市现代化的推进,为了更合理地运用有限的地下空间,矩形或类矩形等异形断面隧道被越来越多地应用到城市隧道工程中[1-5]。矩形断面的隧道尺寸越做越大,施工距离越来越长[6-8]。当前市场上缺少矩形盾构机,投入到工程应用的矩形或类矩形隧道掘进机主要以顶管形式为主,不具备管片拼装机等设备,管节跟随掘进机体一同向前顶进,施工条件受到很大限制。而传统圆形盾构所用的管片拼装机受拼装机械手活动范围限制,无法直接应用在矩形等异形隧道掘进机上,因此对可用于矩形及其他异形断面的管片拼装机进行研究有重要的意义。
国内多家机构对盾构管片拼装机进行了研究,提出了一些新的拼装机构类型。如武汉大学喻萌、程燕采用虚拟样机技术研究了回转加摆臂式拼装机[9-10];上海交通大学黄业平等人研究了基于3-RPS并联构型的管片拼装机构[11-12];钱晓刚研究了采用球面二自由度的空间五杆机构来实现拼装自由度[13-14],为隧道管片拼装技术提供了新的思路。
本文以应用于宁波市轨道交通3号线一期工程出入段线的类矩形盾构机为依托,对其管片拼装机进行研究。受施工区域空间条件限制,项目采用类矩形断面管片,中间设置立柱,两侧区域分别供2条轨道线路使用,管片外廓尺寸为11.50 m×6.94 m。
针对工程中所用的类矩形特殊断面,项目借助工业机器人理念,综合机械工程理论、数学方法、控制理论、电气工程技术以及计算机软件技术等[15-19],采用双串联机器臂式拼装机构,达到六自由度管片拼装功能,同时满足特殊空间角落的拼装能力。
1 类矩形管片特点
类矩形管片有如下特点。
(1)隧道断面大。外廓尺寸宽11.50 m,高6.94 m。
(2)管片结构复杂。单环管片分为11片,中间设置立柱,立柱高度为5.22 m。
(3)错缝拼装。要求左右拼装机均能完成各块管片的拼装。
管片断面及分块如图1所示。
管片断面为非圆形,内部用于管片拼装的空间也为非圆环形;管片形状为非统一圆弧,有单一圆弧,有两段圆弧,中立柱管片为直线,拾取点处圆弧为非统一圆心;拾取点为非质心,机械手需要承担较大力矩。管片长度空间比非常大,已超过0.8,且管片形状为大长度直线管片,而拼装空间近环形,管片无法在拼装空间平面拼装,常规圆形拼装机长度空间比均为0.4左右,管片形状与拼装控制相似,无法完成本工程管片拼装功能,需要突破传统的拼装思路。
2 传统圆形拼装机分析
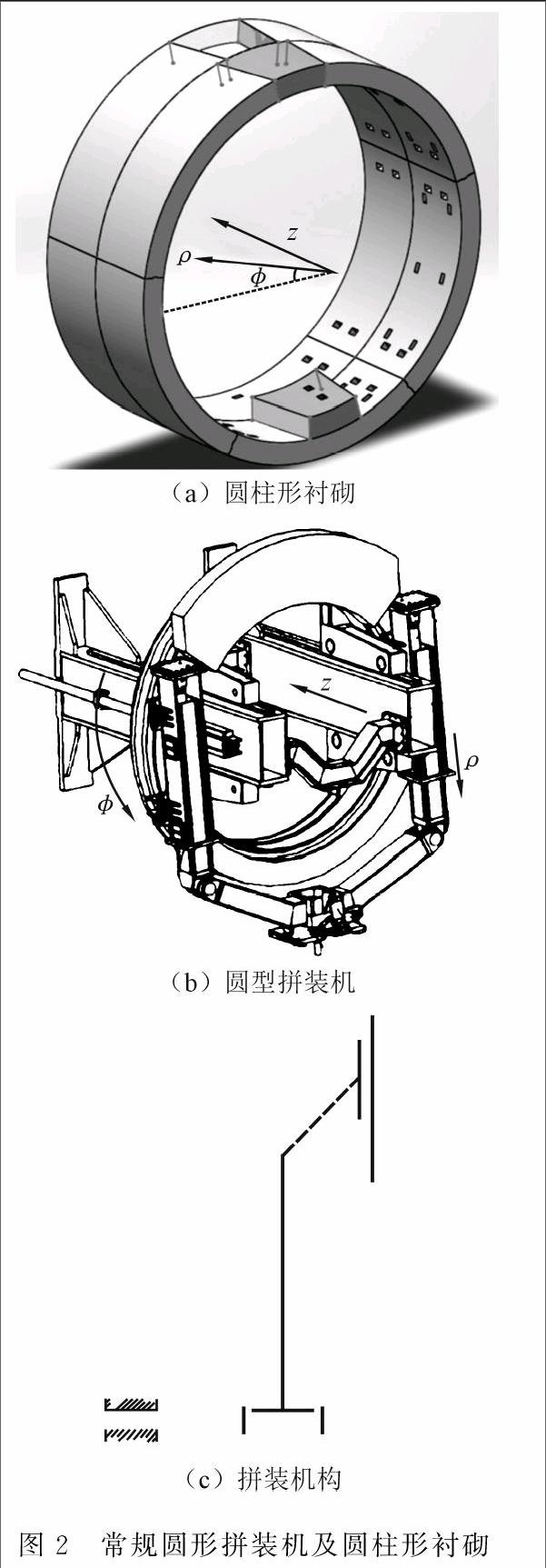
目前,圆形拼装机将管片拼装成一个圆柱形衬砌,如图2 (a)所示,常规圆型拼装机如图2 (b)所示。拼装机构简图如图2(c)所示,位置控制机构为PRP结构形式。第一个运动副为沿Z轴移动的大平移机构,是一个冗余滑动副(P);第2个运动副為沿φ方向的旋转机构,是一个旋转副(R);第3个运动副为沿ρ方向移动的径向移动机构,是一个冗余滑动副(P)。执行机构运动副与运动坐标系一致,结构简单无需运动耦合。
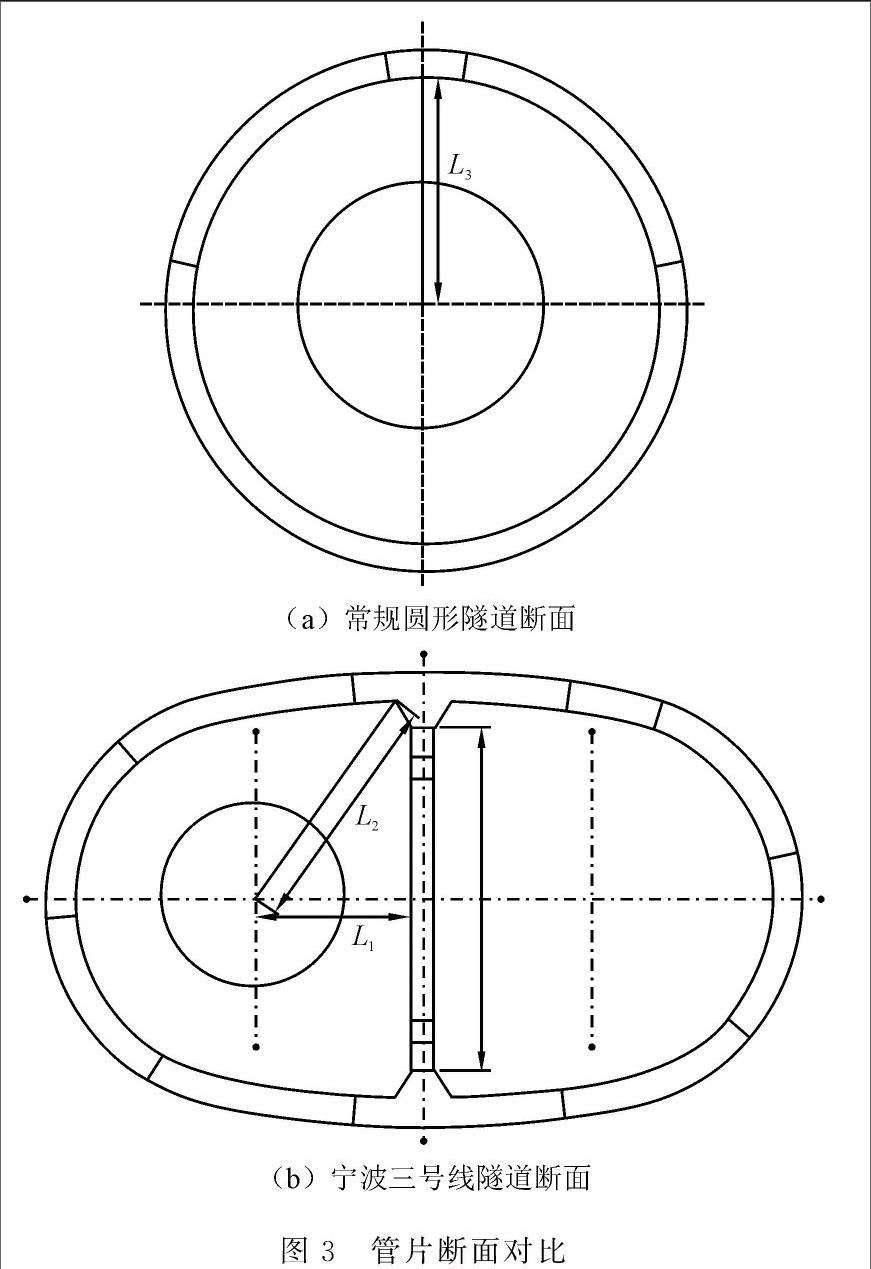
如图3(a)所示,常规圆形隧道为不变半径L3,通过PRP结构形式定位的拼装机适合圆形断面管片拼装。目前,宁波三号线隧道断面如图3(b)所示,其内部空间为非圆形,长边L2和短边L1差值大。内部管片工作空间狭长,管片运动复杂,通过PRP结构形式定位的拼装机基本无法拼装;中立柱无法在拼装空间平面内回转,也难以完成拼装,急需研发新型机构来完成这类情况下的管片拼装。
3 1P5R拼装机构设计
该类矩形管片形成的隧道是非圆断面的柱状体,可采用一个滑动机构实现柱状体轴线方向运动。类矩形断面内部空间不规则且狭长,RRR运动结构形式有3个回转运动副串联,可灵活控制管片平面位置点和位置平面姿态,有利于管片在狭窄空间完成拼装。拼装机的定位机构采用PRR定位机构加R姿态机构形式。
管片C1、C3、T2、T1的拼装轴线不过拼装圆心,其平面姿态调节范围较大,对应立体坐标系绕Z1周旋转的范围大。类矩形管片中立柱纵向输送到拼装机拾取处,如图4所示。中立柱拼装目的处为图4虚线处。PRR定位机构的拼装只能将中立柱送达图中所示位置,需管片位姿调整机构将其绕x1轴旋转90°。绕Z1和x1轴旋转角度均较大,常规的并联三自由度机构已经无法实现这种大范围的姿态调整,只能采取串联型的机构。综合以上情况,并考虑到管片姿态调整还需一个绕y1轴的微小姿态调整,该管片拼装机采用串联型的RRR结构形式,如图5、6所示。因此,类矩形管片拼装机的机构采用PRRRRR形式,即1P5R形式。
六自由度串联管片拼装机由回转系统、平移系统、机械臂和机械手构成。其中回转系统的主要功能是在拼装管片的过程中提供回转力矩,形成机构整体绕管片轴线的回转运动,并且为整个拼装系统提供支撑作用。提升系统的主要结构是2个提升油缸和2个导杆,2个提升油缸完成对管片的提升和上推;平移系统主要由1个双作用油缸和2根水平导杆组成;夹取装置用于拾取管片并进行微小的姿态调节。
如图7所示,六自由度串联型拼装机由6个液压执行机构完成运动,6个执行机构完全约束拼装机械手的6个自由度。其中平移油缸提供拼装机整体沿隧道轴线(z轴)平移;回转油缸带动拼装机整体沿轴线回转,大臂油缸驱动机械大臂摆动,小臂油缸驱动机械手装置整体(小臂)在大臂上摆动,回转马达和大臂、小臂油缸共同作用调整管片沿x、y轴向的位置以及绕z轴转动的姿态;仰俯油缸和平转油缸分别驱动机械手带动管片绕x、y轴转动进行姿态调整。
此外,拼装机械手装置内设有管片夹取装置,内置油缸安装在转动板上,油缸伸缩带动吊装螺栓拾取管片,管片贴紧转动板之后随转动板一起作空间六自由度运动。
在xy轴平面内,由回转马达和大臂、小臂油缸共同作用,使管片按所需轨迹运动。图8中,以ω为OA相对x轴的转角,由回转马达转动量直接控制ω值,θ1为∠OAB,由大臂油缸伸出量控制θ1值,θ2为∠ABC,由大臂油缸伸出量控制θ2值。根据ω、θ1、θ2以及相关臂长数据的几何关系进行三角函数计算,可得出拼装机拾取点C的平面坐标以及绕z轴的转动姿态角度。同样,对于指定的管片拾取或安装点,由计算机计算出所需的回转马达旋转角度以及油缸行程,将拼装机运行至相应的位置;根据合适的管片拼装路径也能计算出相应的执行元件(马达和油缸等)的动作指令。
根据拼装机机械臂的张开大小,管片与拼装机之间的连接点可在直径为3.67~6.95 m的范围运动,如图9(a)所示。通过2台串联型拼装机协作施工,可完全覆盖本工程所用类矩形隧道管片所有拾取及安装区域,如图9(b)所示。
4 结 语
本文设计的1P5R型管片拼装机,创新地将串联型运动机构应用于隧道盾构管片拼装机中,这种新型拼装机解决了工程中类矩形断面隧道管片的拼装难题,亦可扩展应用至其他异形断面隧道管片的拼装。通过在计算机预置拼装路径,根据需要实时计算各执行元件的动作过程,可以实现所需运动轨
迹,提高了施工效率,并为隧道施工的自动化和智能化提供了发展空间。
参考文献:
[1] 郭 昊.矩形顶管机下穿郑州市中州大道工程简介[J].中国市政工程,2013(5):53-55.
[2] 贾连辉.超大断面矩形盾构顶管设计关键技术[J].隧道建设,2014,34(11):1098-1106.
[3] Tadashi Hashimoto.市区软土地层地下工程施工新技术[J].隧道建设,2012,32(3):261-269.
[4] 李 刚,于天彪,费学婷,等.基于数字样机的TBM管片拼装机运动学和动力学仿真[J].中国工程机械学报,2012,10(3):260-264.
[5] 滕延锋.矩形盾构新型管片拼装设备与拼装技术的研究[J].建筑施工,2016,38(2):221-223.
[6] 吕建中,庄欠伟.φ14.87m盾构液压推进系统分析[J].筑路机械与施工机械化,2008,25(7):75-77.
[7] 卞永明,方晓骏,杨濛,等.矩形盾构管片拼装机同步控制系统的设计[J].同济大学学报:自然科学版,2016,44(4):637-644.
[8] 张友湖,余克文.基于TBM的管片拼装机结构设计及三维建模[J].煤矿机械,2011,32(7):14-17.
[9] 喻 萌.TBM管片拼装机的虚拟样机研究[D].武汉:武汉大学,2005.
[10] 程 燕.隧道管片自动拼装机的虚拟样机及其仿真[D].武汉:武汉大学,2005.
[11] 黄业平.隧道掘进装备铰接与管片拼装机构设计研究[D].上海:上海交通大學,2010.
[12] 黄业平,郭为忠,高 峰.3-RPS并联构型的管片拼装新机构[J].机械设计与研究,2010,26(3):12-14,18.
[13] 钱晓刚.盾构掘进设备中的管片拼装机机构设计方法[D].上海:上海交通大学,2008.
[14] 钱晓刚,高 峰,郭为忠.六自由度盾构管片拼装机机构设计[J].机械设计与研究,2008,24(1):17-20.
[15] 崔国华.盾构管片拼装机的设计及动态性能研究[D].长春:吉林大学,2009.
[16] 岳彦炯.基于虚拟样机的六自由度隧道管片拼装机设计研究[D].长春:吉林大学,2008.
[17] 李文福.盾构管片拼装机的结构分析[J].山西建筑,2010,36(5):337-339.
[18] 李 光,赵晓东.管片拼装机新型旋转限位装置的设计[J].隧道建设,2010,30(1):97-99.
[19] 孙志超,黄晓华.基于3-PRPS并联机构的管片拼装系统的设计与应用[J].机械制造与自动化,2013,42(3):127-129.
[责任编辑:王玉玲]
猜你喜欢
环境技术(2021年4期)2021-09-11
装备制造技术(2021年4期)2021-08-05
冶金设备(2020年2期)2020-12-28
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
纤维复合材料(2018年2期)2018-12-07
载人航天(2016年4期)2016-12-01
工程建设与设计(2016年4期)2016-02-27
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25