
基于TOA的布料车定位系统
2017-03-30 12:18王志忠马连成王永增吴雅南李希飞
物联网技术 2017年3期
王志忠+马连成+王永增+吴雅南+李希飞+张航+何杰


摘 要:布料车是工业现场一种常见的轨道车,传统人工控制效率较低。文中设计了一种基于信号传播时间技术的布料车定位系统,并将定位结果转化为4~20 mA的PLC控制信号后接入布料车控制系统中,实现了基于精确定位的布料车自动控制。文中开发了布料车定位系统的实际硬件,利用均值滤波、卡尔曼滤波等算法实现了布料车的精确定位。将该系统部署到鞍山钢铁集团公司的实际工业现场,现场测试结果显示该系统具有很好的定位精度,能够满足工业现场布料车控制的需求。
关键词:超宽带;无线定位;时间到达;工业物联网;布料车;室内定位
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2017)03-00-04
0 引 言
目前,传统工业正在向智能制造的方向快速发展。中国、美国、德国、日本等主要工业大国都提出了各自的智能工业发展计划。在智能制造中,基于工业物联网的状态监测和控制将成为一种重要的基础设施。积极开展工业物联网的实际应用尝试能够加快工业物联网的产业化进程并加速我国传统制造业的智能化改造。在工业环境中,移动目标的控制是一项重要工作。对移动目标进行精确定位是移动目标自动控制的基础。布料车是一种将物料投放到不同料仓的轨道布料车,是一种典型工业环境中的移动目标。传统的操作方式是操作员控制布料车运行到所需投放的料仓位置,然后再进行物料投放。这种方式需要通过观察布料车的当前位置来实现控制,效率低、人力成本高。利用室内定位技术对布料车的位置进行实时精确定位,实现布料车的自动控制。布料车定位是室内定位技术在工业现场的典型应用。
室内定位技术是多移动物体轨迹相关性分析、室内目标跟踪、基于位置的服务、移动机器人等应用系统研发的核心,已得到广泛重视与研究。尤其伴随着射频信号处理技术的发展,基于射频信号测距的室内定位技术被创新地应用到诸多领域[1]。如全球定位系统GPS无法覆盖的室内、隧道、矿井,通过基于射频信号测距进行目标定位,实现基于位置的服务。应用室内定位技术进行多目标跟踪,通过分析多移动目标轨迹的相关性,实现智能物资人力管理、智能医疗、公共场所安全防务、高危行业的安全级别提升等。通过距离或位置监测控制机器人的运动,以及在无线传感器网络中应用位置信息进行路由通路选择等。射频信号测距方法有很多[2-5],包括基于接收信号强度(Received Signal Strength Indicator,RSSI)的测距、基于信号传播时间(Time of Arrival,TOA)的测距、基于信号传播时间差(Time Difference of Arrival,TDOA)的测距、基于接收信号角度(Angle of Arrival,AOA)的测距[6]、基于接收信号相位差(Phase Difference of Arrival,PDOA)的测距等。基于RSSI测距是在已知发射功率的前提下,通过测量接收方的信号强度RSSI来计算两点之间的距离。这种方法虽然符合低功率、低成本的要求,但可能产生±50%的测距误差,被认为是一种不可靠的定位方法[5]。基于TOA测距[7]通过测量一个往返过程中信号(RF、超声波等)传输时间来计算发送方到接收方的距离。基于TDOA测距首先需要进行节点间时钟同步,然后通过测量信号发出时间和信号接收时间来计算两节点间的距离。基于TOA测距和基于TDOA测距都能达到较高精度,但基于TDOA测距对硬件配置要求高,因此成本较高[3]。与基于RSSI测距及基于TOA/TDOA测距不同,基于AOA的测距利用邻居节点提供的方位或角度信息来确定节点间的距离,需要专用硬件支持。因此,基于TOA测距被公认为一种性价比较高的方法。
本文设计了一种基于TOA的布料车定位系统,开发了布料车定位系统的硬件和定位算法,并将该系统部署到了鞍山钢铁集团公司的实际工业现场中。现场测试实验结果显示该系统具有良好的定位精度,能满足工业现场布料车控制的需求。
1 系统结构与硬件设计
1.1 系统结构
本系统利用TOA定位技术对布料车进行实时定位,系统结构如图1所示,包括锚节点(Anchor)、标签(Tag)和汇聚 (Sink)。由于布料车运行在一维轨道上,本系统在轨道两端正上方各安装了1个锚节点。标签节点安装在布料车上,实现与锚节点测距和自身位置坐标的计算,并将计算结果发送给汇聚节点。汇聚节点连接到布料车的控制系统中,将从标签接收到的数据转发给布料车控制系统,实现布料车的自动控制。
1.2 硬件设计
布料车定位系统的主要功能为定位和数据通信。在多金属的工业现场室内环境中,大量金属设备造成严重的多径传输现象,并影响测距/定位精度和数据传输可靠性。为降低多径传输对系统的影响,本文在測距/定位射频模块和数据通信射频模块进行了有针对性的选型。
1.2.1 测距/定位射频模块
目前,TOA(Time of Arrival,TOA)是最为常用的高精度测距技术,其原理是测量信号在介质中的传输时间,进而计算出信号的传输距离。 IEEE 802.15.4a标准定义了TOA技术的两种物理层通信技术:Chirp扩频技术(Chirp Spread Spectrum, CSS[7])和超宽带技术(Ultra-Wide Band, UWB)[8,9]。其中,CSS技术的通信频率为2.40~2.483 GHz,通信带宽为83 MHz;UWB技术的通信频率为3.1~10 GHz,通信带宽至少要达到500 MHz[10]。两种技术的典型芯片分别为基于CCS物理层的NanoLOC和基于UWB物理层的DW1000[11,12]。对于TOA测距而言,带宽越宽则对抗多径干扰的能力越强。因此,本文选择DW1000作为测距芯片。
1.2.2 数据通信射频模块
由于布料车与控制系统之间的距离较远,使用UWB技术无法满足通信距离的要求。本文选择433 MHz的SX1276[13]作为数据通信射频模块。433 MHz是ISM公开频段,波长较长,具有较好的绕射能力。与传统的433 MHz射频芯片相比,SX1276使用了线性扩频技术,提升了对抗多径干扰的能力,进而提高了接收灵敏度、通信距离和传输可靠性。
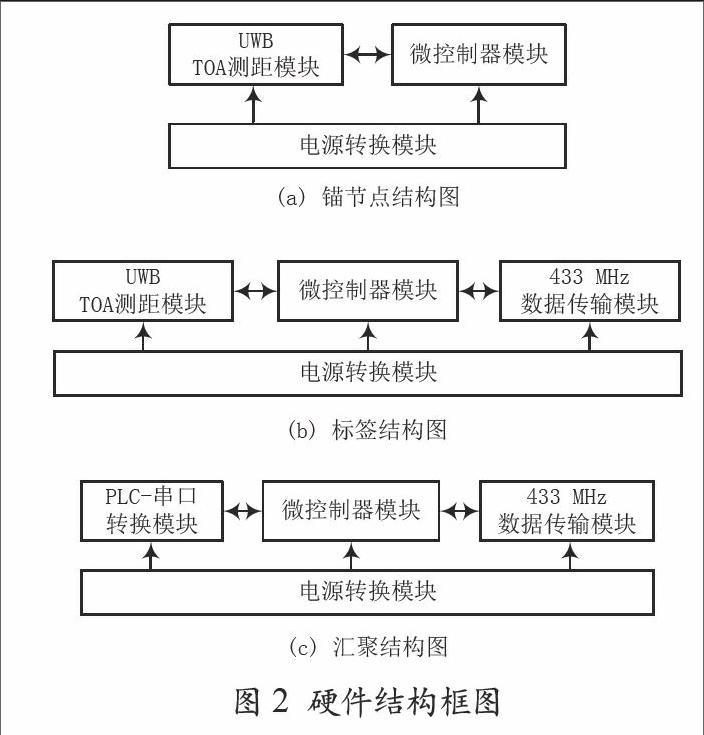
其他硬件主要包括微控制器STM32103F、220 V/380 V转5 V电源模块、布料车控制系统接口模块等。
锚节点、标签和汇聚的硬件模块结构分别如图2(a) ,图2 (b) ,图2 (c)所示。
2 布料车定位算法
TOA测距精度主要受多径传输、非视距传输和到达时间检测精度的影响。前两者取决于系统部署环境,后者取决于硬件本身的实现。在布料车定位系统中,可以通过Anchor节点和Tag节点安装位置的选择来避免非视距,但多径传输和到达时间检测精度无法避免。为减少多径传输和到达时间检查精度的影响,提高系统定位精度,本文采用如下做法:
(1)在TOA测距的基础上,对测距结果进行均值滤波,提高测距精度;
(2)采用一维质心定位算法,计算Tag的坐标;
(3)采用卡尔曼滤波算法对定位结果进行平滑。
2.1 TOA测距算法和均值滤波算法
本系统采用无线测量基于信号到达时间(Time of Arrival,TOA)的距离测量方法,其工作原理如图3所示。
Tag和Anchor为进行TOA测距的两个节点。T1为Tag向Anchor发送Ranging Data的时刻;T2为Anchor收到Ranging Data的时刻;T3为Anchor向Tag发送ACK的时刻;T4为Tag收到ACK的时刻。Tag和Anchor通过本地时钟分别测量发射和接收的时间长度,计算出信号在两个设备之间的传输时间。设备之间的距离由公式(1)得出:
其中,c为光速。
本文采用了均值滤波算法(也称为邻域平均法)来进一步提高测距精度。均值滤波的基本原理是用均值代替m个原测距值,每隔m个测距值,取一个均值作为当前测距值,如式(2)所示:
2.2 一维质心定位算法
布料车运行在一维轨道上,因此可以采用一维质心定位算法,其原理如图4所示。整个坐标系所在平面为布料车所在轨道、AnchorA和AnchorB一起构成的平面,以布料车运行起点为坐标原点,轨道为X轴,高度为Y轴。两个锚节点坐标分别为AnchorA(XA,YA)和AnchorB(XB,YB);未知标签节点Tag(XT,0)。AnchorA到Tag测得的距离为DISA,因为只能测到距离值,所以Tag有可能在AnchorA的左边或右边,设为DISA1、DISA2。AnchorB到Tag测得的距离为DISB,同理,得到DISB1、DISB2。通过勾股定理能够计算出X轴到AnchorA的距离为DISA的两个点(X1,0)和(X2,0),到AnchorB的距离为DISB的两个点(X3,0)和(X4,0)。X1、X2、X3、X4的值由式(3)得出:
对两个候选坐标求平均获得Tag的坐标,由式(5)求得:
2.3 卡尔曼滤波算法
本系统对定位结果采用卡尔曼滤波(Kalman Filtering),以提高定位精度。卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰影响,所以最优估计也可看作滤波过程。
首先利用系统的过程模型来预测下一时刻布料车的位置。假设现在的系统状态是k,根据系统模型,可以基于布料车上一时刻的位置信息而预测出当前位置:
式(6)中, X(k-1|k-1)是k-1时刻布料车的位置, X(k|k-1)是k时刻布料车的位置,U(k)是k时刻对系统的控制量,在該系统中表示布料车移动的加速度,因为布料车为匀速行驶,所以U=0。A和B是系统参数,对于多模型系统,其为矩阵,本系统中A=1。
用P表示协方差(covariance),则:
式(7)中, P(k|k-1)是X(k|k-1)对应的协方差, P(k-1|k-1)是X (k-1|k-1)对应的协方差, A'表示A的转置矩阵,Q是系统过程的协方差。
得到布料车位置的预测结果,再收集现在位置的测量值。结合预测值和测量值,可以得到当前位置(k)的最优化估算值X(k|k),如式(8)所示:
3 验证
为了测试验证系统的有效性,对系统进行实际场景下的测试分析。测试环境和测试节点如图5所示,轨道长度160 m。系统测试包括测距和定位两方面。
3.1 测距精度分析
本文在实际场景中进行了大量测距实验,并统计了测距误差累计分布(Cumulative Distribution Figure, CDF)和测距误差的均值和方差。对均值滤波后的测距误差和均值滤波前的原始测距误差进行对比。测距误差定义如式(11)所示:
式中,Δd为测距误差,为测距值,d为真实距离。
均值滤波前后的CDF对比如图6所示,均值和方差对比见表1所列。通过对比可知均值滤波后的测距误差小于均值滤波前的原始测距误差。因此,均值滤波能够起到提高测距精度的作用。
3.2 定位结果分析
在定位结果分析中,本文统计了定位误差累计分布(Cumulative Distribution Figure, CDF)和测距误差的均值和方差。对卡尔曼滤波后的定位误差和卡尔曼滤波前的原始测距误差进行对比。由于是一维定位,因此定位误差定义如式(12)所示:
式中,e为定位误差,为标签的X轴定位结果,XT为标签的X轴真实坐标。
卡尔曼滤波前后的定位误差CDF对比如图7所示,定位误差均值和方差对比见表2所列。通过对比可知,卡尔曼滤波后的定位误差小于滤波前的原始测距误差。因此,卡尔曼滤波能够起到提高定位精度的作用。
4 结 语
布料车定位是室内定位技术在工业现场的一种典型应用。本文设计了一种基于TOA的布料车定位系统,设计并开发了布料车定位系统的硬件和定位算法,并将该系统部署到了鞍山钢铁集团公司的实际工业现场中。现场测试实验结果显示,该系统具有较高的定位精度,能够满足工业现场布料车控制的需求。
参考文献
[1] Liu H, Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems[J].IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37(6): 1067-1080.
[2]于峰.无线传感器网络定位研究[D].北京:北京科技大学, 2009.
[3] Alsindi N, Li X, Pahlavan K. Performance of TOA estimation algorithms in different indoor multipath conditions[C].Wireless Communications and Networking Conference, 2004. WCNC. 2004 IEEE. IEEE, 2004: 495-500.
[4] PATWARI N. Location estimation in sensor networks(PhD. Thesis)[D].Hero III A O, Thesis Supervisor. MI, USA: EECS Department, University of Michigan, 2005.
[5] Parameswaran A T, Husain M I, Upadhyaya S. Is rssi a reliable parameter in sensor localization algorithms: An experimental study[C].Field Failure Data Analysis Workshop (F2DA09).IEEE, 2009: 5.
[6] Lee J S, Su Y W, Shen C C. A comparative study of wireless protocols: Bluetooth, UWB, ZigBee, and WiFi[C].Industrial Electronics Society, 2007. IECON 2007. 33rd Annual Conference of the IEEE. IEEE,2007: 46-51.
[7]王沁,何杰,张前雄,等.测距误差分级的室内TOA定位算法[J].仪器仪表学报,2011,32(12): 2851-2856.
[8] Nguyen V H, Pyun J Y. Location detection and tracking of moving targets by a 2D IR-UWB radar system[J].Sensors, 2015, 15(3): 6740-6762.
[9] He J, Li S, Pahlavan K, et al. A realtime testbed for performance evaluation of indoor TOA location system[C].2012 IEEE International Conference on Communications (ICC). 2012: 482-486.
[10] Feng G, Shen C, Long C, et al. GDOP index in UWB indoor location system experiment[C].SENSORS, IEEE, 2015: 1-4.
[11] Khalaf-Allah M. Time of arrival (TOA)-based direct location method[C].2015 16th International Radar Symposium (IRS). IEEE, 2015: 812-815.
[12]楊狄,唐小妹,李柏渝,等.基于超宽带的室内定位技术研究综述[J].全球定位系统,2015,40(5):34-40.
[13] Vangelista L, Zanella A, Zorzi M. Long-Range IoT Technologies: The Dawn of LoRa?[C].Future Access Enablers of Ubiquitous and Intelligent Infrastructures. Springer International Publishing,2015: 51-58.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
东北电力大学学报(2015年1期)2015-11-13
河南科技(2014年12期)2014-02-27
