大型风力发电机组变桨距控制技术研究
2017-03-30 19:01程申高桂革曾宪文
科技与创新 2016年22期
程申+高桂革+曾宪文

摘 要:由于风速的随机性、时变性和风力发电系统的非线性等特点,根据对风速特性、桨叶空气动力学理论的分析,提出了基于前馈补偿的独立变桨距控制策略,分别采用方位角和加速度权系数分配对各个桨叶单独进行控制,然后根据前馈补偿理论分别对2种控制方法进行补偿。通过建模仿真和比较2种方法,结果表明:2种控制策略都能在稳定输出功率的同时降低桨叶的拍打振荡和不平衡载荷,减轻风机的疲劳载荷。前者简单易行、成本低,具有很好的工程应用价值;后者對风速应对能力更强,响应速度更快。
关键词:独立变桨距控制;前馈补偿;方位角权系数;加速度权系数
中图分类号:TM315 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.22.014
随着风电机组单机容量的不断增大,变桨距控制技术已成为风力发电的一项关键技术。变桨距控制通常又分为统一变桨距控制和独立变桨距控制2种方法。独立变桨距根据桨叶所受风速或受力的不同来调节每个桨叶的桨距角,不仅能够稳定风机的输出功率,还能够降低桨叶的拍打振荡,改善风轮载荷不均匀情况,降低机组的疲劳应力,延长风机的寿命。
本文分析了风速特性、空气动力学理论,提出了基于前馈补偿理论的独立变桨距控制方法,通过仿真分析,结果表明:使用此独立变桨控制策略不但能够使风机的输出功率稳定在额定功率附近,而且能够降低机组载荷,减小桨叶振荡。
1 独立变桨距控制基本原理
1.1 风速特性
风切变效应是指当风速稳定时,随着高度的增加风速会不断增大。风切变效应公式为:
此外,桨叶的轴向气动力是桨叶产生拍打振荡的主要原因。
2 基于前馈补偿的独立变桨距控制策略
基于桨叶方位角信号和基于桨叶加速度信号是2种基础的独立变桨距控制方法。
2.1 基于方位角权系数分配的控制策略
基于方位角权系数分配的独立变桨距控制策略是通过方位角传感器来测量信号的控制方法。在正常工作时,桨叶的所处位置可以根据方位角θ来确定。权系数根据各桨叶受风的大小来分配。原则为:在稳定风机输出功率的前提下得出统一变桨距相对应的值,再通过权系数对各个桨叶桨距角的变化量进行调整。受风越大,所对应的权系数就越大,而桨距角变化值也越大;反之,则越小。
独立变桨距桨距角变化量调整的最大范围为:
2.2 基于加速度权系数分配的控制策略
基于加速度权系数分配的独立变桨距控制策略是利用加速度传感器测量信号的控制方法,可以直接检测风机桨叶受力状况。根据各桨叶的受力情况分配相应的权系数,受力越大,分配的权系数就越大,桨距角的变化量也就越大;反之,则越小。权系数的分配方法和控制思路与基于方位角加速度权系数分配的独立变桨控制策略类似,Ki为各桨叶对应的权系数,为加速度信号。
2.3 前馈补偿控制
前馈补偿的理论不但能够抑制扰动所引起的静态偏差和动态偏差,而且能够被用于随动系统给定信号之中,前馈补偿的目标是加强系统的跟随性能。其原理为:在已知外部作用的前提条件下,施加相反于外部作用的控制量,目的是不让被控制量受到变化,即在控制量与外部作用的共同作用下降低偏差。
按照输入补偿的控制系统如图1所示。
3 仿真结果分析
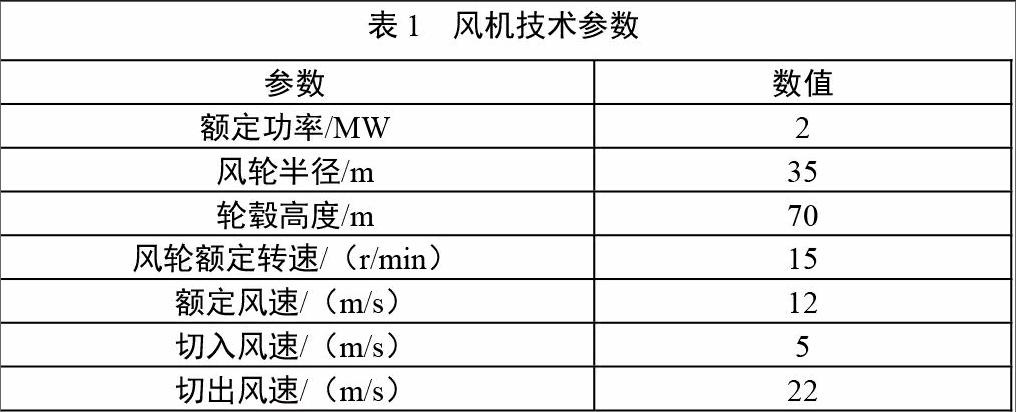
风机模型的参数使用2 MW风机的主要参数来仿真。主要参数如表1所示。3.1 仿真曲线分析
3.1.1 方位角权系数独立变桨距控制仿真
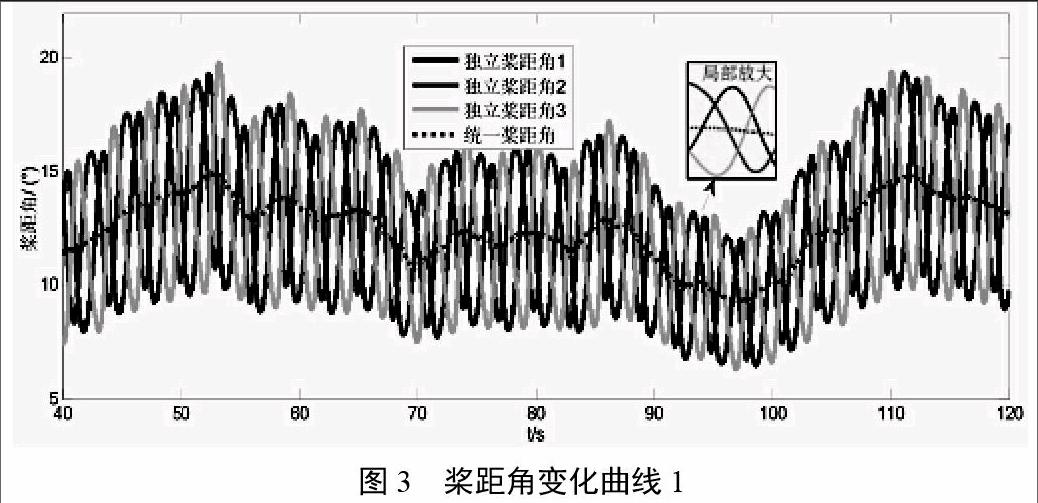
图3为在随机风速下桨距角的变化曲线。由此可知,随着风速的变化,独立变桨距控制策略根据所测量桨叶方位角的变化来分配权系数,使得桨距角随着风速的不断变化而变化。
图4为输出功率的仿真。相对于统一变桨距控制,独立变桨距控制输出功率的幅值变化频率与幅度更低,曲线更平滑,对于维持风力发电机组输出功率有更好的稳定性。
3.1.2 加速度权系数独立变桨距控制仿真
图5为在随机风速下桨距角的变化曲线。由图5可以看出,随着风速的变化,独立变桨距控制策略根据所测量各桨叶加速度(受力)的变化来分配权系数,使得桨距角随着风速的不断变化而变化。
图6为输出功率曲线。由图6可知,使用独立变桨距控制的频率和幅度更低,响应速度也更快,随着时间的增加,控制器精度不断提升,表现出更好的稳定性。
3.2 两种控制策略比较
通过仿真得出结果,即2种独立变桨距控制策略都具有良好的控制性能,在满足输出功率稳定性的同时实现各桨叶的平稳变化,能进一步减小桨叶的拍打振荡,减轻风力发电机组疲劳载荷。但是,基于前馈补偿的加速度权系数控制策略对于不断变化的风速应对能力更强,相应速度更快。
作为权系数反馈量的方位角和加速度,其测量都需要用传感器来实现。通常,风机上都会有测量桨叶方位角的转速传感器,易于装配且成本不高;而加速度传感器要在各个叶片多处安装来保证其精确测量,致使其成本增大并且安装较困难。从难度和成本上看,前者更为简单实用。
从变桨距执行机构来看,基于方位角的控制策略更加依赖转速的调节,有其固定的调桨幅度;基于加速度的控制策略由于还会受到湍流效应等因素的影响,使其变桨变化范围与频率更大,对其执行机构的要求会更高。
总之,基于前馈补偿的加速度权系数控制策略的控制性能比基于前馈补偿的方位角权系数控制策略会更好一些,对风速的应对能力相对更强,不过其要求更多、更精确的传感器来保证精度,对变桨距执行机构的要求也更高。这样成本就会很高。所以,在实际工程中2种控制策略的应用需要视情况具体分析。
4 结论
为了实现大型风力发电机组的独立变桨距控制,使用方位角和加速度权系数两种基础的独立变桨距控制方法对每个桨叶
桨距角进行控制。再根据前馈补偿的控制原理,提出基于前馈补偿的独立变桨距控制方法。2种策略策略都具有更好的控制性能,在满足输出功率稳定性的同时实现各桨叶的平稳变化,能进一步减小桨叶的拍打振蕩,减轻风力发电机组疲劳载荷。基于前馈补偿的加速度权系数控制策略对于不断变化的风速应对能力更强,响应速度更快;基于前馈补偿的方位角权系数控制策略控制方法简单易行成本低,具有很好的工程应用价值。
参考文献
[1]刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制[J].电力系统自动化,2013,27(20).
[2]李晶,宋家骅,王伟胜.大型变速恒频风力发电机组建模与仿真[J].中国电机工程学报,2014,24(6).
[3]王志新.现代风力发电技术及工程应用[M].北京:电子工业出版社,2010.
[4]任丽娜,吕明月,刘爽爽.基于蜂群算法优化的变桨距自抗扰控制器[J].新型工业化,2014(06).
[5]Vapnik V.The nature of statistical learning theory.New York:Springer,1995.
[6]王欣,李胜刚,秦斌.基于模糊支持向量机的风电场功率预测[J].新型工业化,2014(09).
[7]姚兴佳,张雅楠,郭庆鼎.大型风电机组三维模糊控制器设计与仿真[J].中国电机工程学报,2009,29(26).
[8]Kyoungsoo Ro,Hanho Choi.Application of neural network controller for maxilnum power extraction of a grid connected wind turbines system.Eleetrical Engineer,2005,88(12).
[9]Jianning Li,Hongye Su,Yibo Zhang.Chattering Free Sliding Mode Control for Uncertain Discrete Time-Delay Singular Systems.Asian Journal of Control,2013,15(1).
[10]廖勇,何金波,姚骏.基于变桨距和转矩动态控制的直驱永磁同步风力发电机功率平滑控制[J].中国电机工程学报,2009,29(18).
〔编辑:刘晓芳〕