一种基于改进的混合高斯模型的运动目标检测算法
2017-03-31 20:03李旭健张丛静
软件导刊 2016年8期
关键词:目标检测
李旭健+张丛静


摘 要:在计算机视觉应用中,复杂场景运动目标检测是视频监控、目标追踪的基础,也是智能视频监控领域的研究热点之一。针对现有运动目标检测算法中阴影干扰和参数初始化粗糙的问题,在混合高斯背景建模的基础上采用HSV颜色空间替换原有的RGB颜色模式,并提出一种结合K均值算法与EM算法的参数初始化方法。实验表明,该算法可以有效抑制场景中运动物体的阴影干扰,检测结果更加精确,对复杂场景下的运动目标有较好的检测效果。
关键词关键词:混合高斯模型;目标检测;EM算法;HSV颜色空间
DOIDOI:10.11907/rjdk.161863
中图分类号:TP312
文献标识码:A :1672-7800(2016)008-0010-03
0 引言
新一代智能视频监控技术的应用范围越来越广,涉及计算机视觉、模式识别、人工智能、图像处理等各个领域,其中运动目标的实时检测是一个基础而又关键的环节[1]。目前,在固定摄像头的监控系统中,主要采用的检测技术有光流法、帧差法和背景差法。Stauffer基于背景差法最早提出用混合高斯建模来描述渐变的动态背景,对图像中像素采用固定数量的高斯分布,该方法能适应缓慢的光照变化,有较好的自适应能力[2]。
由于RGB颜色空间对运动目标的阴影识别能力很差,所以传统的混合高斯算法无法有效地抑制阴影,目标检测效果不是很理想。而HSV空间对运动目标阴影有很好的识别能力,能有效抑制阴影的干扰。因此本文采用HSV混合高斯建模替代原有的RGB颜色模式,并针对传统EM算法对初始化敏感和运行速度慢的问题,提出一种结合K均值算法与EM算法参数初始化的改进算法。一方面降低了EM算法对初始值的依赖性;另一方面,也有效提高了收敛速度及混合高斯模型参数估计值的精度。实验表明该算法能有效抑制阴影干扰,对室外复杂场景下的运动目标有较好的检测效果和鲁棒性。
1 基于改进混合高斯模型的运动目标检测算法
本文算法主要分3个阶段,第一阶段建立背景模型,将RGB颜色模型转化为HSV模式,采用HSV混合高斯建模;第二阶段结合K均值算法与EM算法完成参数的初始化;第三阶段完成运动目标像素值匹配和混合高斯背景模型的更新工作。具体流程见图1。
1.2 K均值与EM算法结合的模型参数初始化
传统高斯分布利用K均值算法初始化参数,该方法对噪声和孤立点数据敏感,在复杂场景中的误差较大[5]。文献[6]利用最大期望(EM)算法初始化参数,该算法精准度较高,收敛稳定,但运行速度慢且对参数初始值敏感,初始化的设定会对结果产生很大的影响。文献[7]利用K均值算法对EM算法进行初始化,解决了计算速度慢的问题,但在选取聚类中心时,随机抽取样本值以及采用矩估计法计算参数迭代的初始值,使得参数估计不够准确。
本文结合K均值算法与EM算法初始化模型参数,利用K均值算法先给出混合数据的一个粗略分类,按照分类数据给出参数的原始估计值,作为 EM算法迭代的初始值。由于抽取的像素样本不知道归类于哪个分布,引入隐藏变量,计算隐藏变量的对数似然函数的期望,即每个像素属于不同模型的概率,最后利用上步求得的最大似然值重新估计参数的值,如此反复,直到收敛[9]。该算法加快了EM算法的迭代速度,而且使得初始化结果更加精确。具体步骤如下:
2 实验结果与分析
为检测本文算法对运动目标的有效性,对该算法进行实验验证。实验计算机CPU为Pentium(R) E5300 2.80GHZ,内存为2.00GB,仿真软件为Matlab7.0,对算法进行检测时,假定各像素之间相互独立。
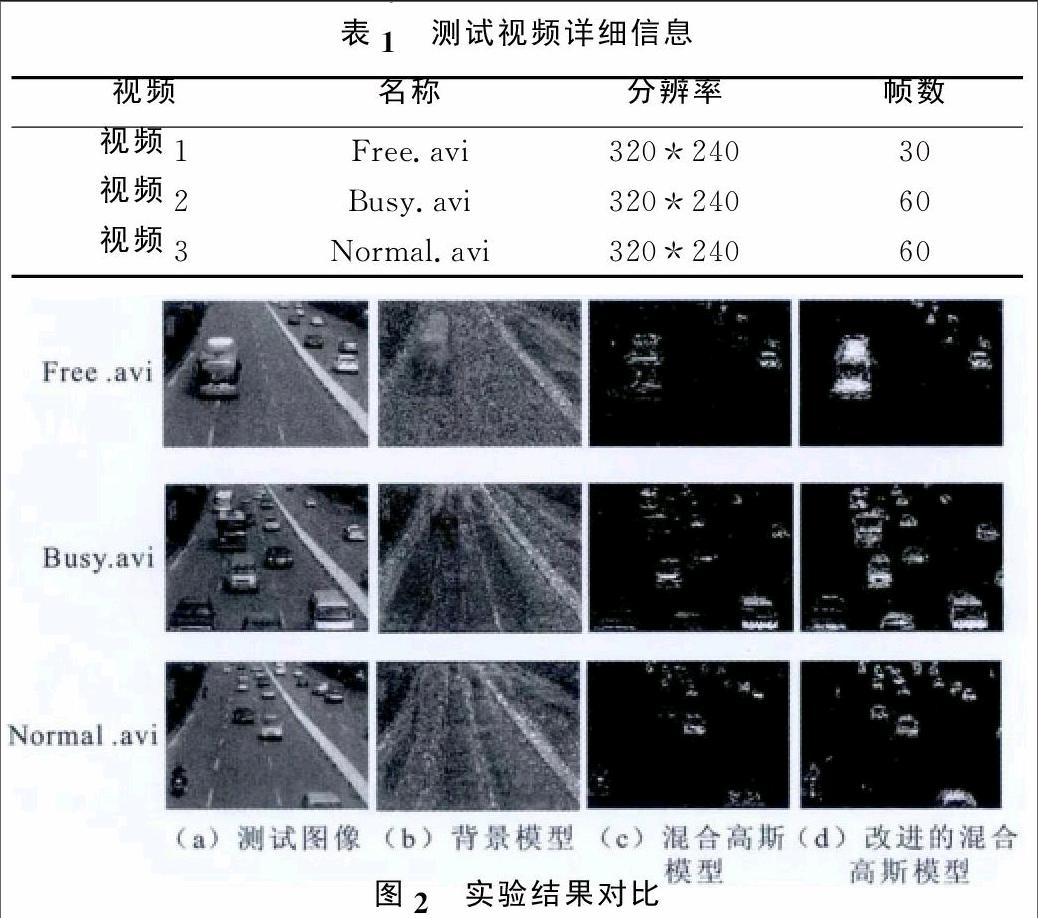
混合高斯模型的最大高斯分布的上限为5,初始权值取0.3。本次实验采取了3段视频,视频信息如表1所示,检测效果如图2所示。
图2 为两种方法在3个测试集进行应用的结果,分别为单独行驶的车辆Free.avi视频,多车辆行驶Busy.avi视频和正常车流量检测视频Normal.avi。针对每一个视频,给出了测试图像、传统混合高斯分布背景模型、传统混合高斯分布的前景检测效果和本文算法的前景检测效果。纵向效果比对,由于Free.avi视频中道路上没有多余的车辆,检测较为明显;而Busy.avi视频中因为车辆较多,受相互叠加的阴影影响,检测效果稍差;Normal.avi检测出了主体目标,效果较好,但是存在明显的噪声和空洞。横
向比对,从检测图像(b)、(c)中可以看出,传统的混合高斯模型算法能够识别运动目标,但是存在明显的阴影噪声和大量空洞[11],目标物体检测不连贯,并且存在漏检现象。图像(d)为本文的检测算法,可以看出,改进后的混合高斯算法,抑制阴影的效果较为明显,檢测的准确性也有较大提升,不足之处在于依然存在部分空洞和噪声,需要后续处理。
3 结语
本文提出了一种基于改进的混合高斯模型的运动目标检测算法,采用HSV混合高斯建立背景模型,将RGB颜色模型转化为HSV模式,结合K均值算法与EM算法完成参数初始化,最后完成运动目标像素值匹配和背景模型的更新。实验证明,在室外正常阳光照射下,该算法可以有效抑制运动目标阴影,检测结果也更加准确,具有良好的鲁棒性。
参考文献:
[1]杨婷婷.交叉口区域多运动车辆跟踪与交通事件检测[D].合肥:中国科学技术大学,2015.
[2]柯佳,詹永照,陈潇君,等.轨迹和多标签超图配对融合的视频复杂事件检测[J].中国图象图形学报,2013(12):26-32.
[3]林庆,徐柱,王士同,等. HSV自适应混合高斯模型的运动目标检测[J]. 计算机科学,2010(10):254-256,290.
[4]吴文星. 基于超声电机的视频运动目标跟踪系统[D].南京:南京航空航天大学,2012.
[5]LIY, LI L.A novel split and merge EM algorithm for gaussianmixture model [C].Proceedings of the 5th International Conference on Natural Computation,2009:479-483.
[6]李百惠,杨庚. 混合高斯模型的自适应前景提取[J]. 中国图象图形学报,2013(18):1620-1627.
[7]王军,柳红岩.基于三目视觉系统的车辆导引方法[J].计算机应用.2014(6):54-57.
[8]邵奇可,周宇,李路,等.复杂场景下自适应背景减除算法[J]. 中国图象图形学报,201(6):756-763.
[9]李百惠,杨庚. 混合高斯模型的自适应前景提取[J]. 中国图象图形学报,2013(12):1620-1627.
[10]黄文丽,范勇,李绘卓,等. 改进的混合高斯算法[J]. 计算机工程与设计,2011(2):592-595.
[11]范文超,李晓宇,魏凯,等.基于改进的高斯混合模型的运动目标检测[J]. 计算机科学,2015(5):286-288,319.
[12]李鸿. 基于混合高斯模型的运动检测及阴影消除算法研究[D].天津:中国民航大学,2013.
(责任编辑:陈福时)
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
科学与财富(2016年28期)2016-10-14
哈尔滨理工大学学报(2015年5期)2016-01-19
湖南大学学报·自然科学版(2015年10期)2015-11-30
现代电子技术(2015年20期)2015-10-26
现代电子技术(2015年14期)2015-07-22