陀螺全站仪定向测量方法的浅析与探讨
2017-04-09 02:52白明张明鹏李巍
环球人文地理·评论版 2017年1期
关键词:探讨
白明+张明鹏+李巍
摘要:简介陀螺全站仪定向真北原理、常用测量方法与数据处理。浅析陀螺全站仪定向观测逆转点法和中天法常见的优缺点;探讨逆转点法与中天法观测时加测时间点和摆幅,判定观测精度、提高观测精度和了解仪器情况。
关键词:陀螺全站仪定向测量;逆转点法;中天法;探讨;观测精度
一、概述
陀螺全站仪是陀螺仪和全站仪结合在一起的仪器。由于它不受时间和环境的限制,同时观测简单方便和效率高,而且能保证较高的定向精度,所以它是一种先进的定向仪器,被广泛应用于矿山井下、地铁、隧道、地下管廊等各个工程的定向测量。陀螺仪的出现改变了传统的几何定向,并在加测陀螺边的导线测量、联系测量和检核方位角等工程测量中得到广泛应用,减少导线误差积累,提高定向测量精度。
二、原理
陀螺仪有两个特性,定轴性和进动性。
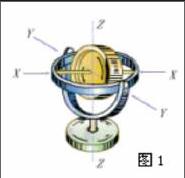
陀螺轴在不受外力作用时,它的方向始终指向初始恒定方位,所谓定轴性;陀螺轴在受外力作用时,将产生非常重要效应“进动”,进动性的结果使陀螺(如图1 X轴)指向真北方向。陀螺仪的模型如图1
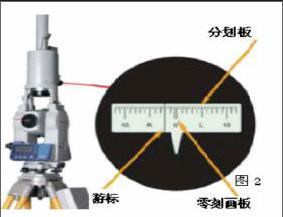
采用悬挂带悬挂陀螺转子组成一个摆,并且将这个摆内置在一个圆柱体中组成悬挂式陀螺仪,它可以架设到全站仪上。如图2这个摆绕地球子午线摆动,其摆动(叫进动)可以通过一个放在该摆上的小镜来观察,并可在悬挂带无转矩的情况下,通过慢慢旋转全站仪进行跟踪它(跟踪方式)。两个逆转点的进动可以通常过全站仪水平度盘读出并且可计算出进动中心即(真北方向)。当全站仪视准轴与进动中心一致时,仪器望远镜即照准真北方向。
三、陀螺方位角、地理方位角和坐标方位角的关系
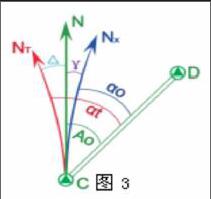
陀螺仪轴与望远镜光轴及观测目镜分化板零分化线所代表的光轴通常不在同一竖直面中,所以假想的陀螺仪轴的稳定位置通常不与地理子午线重合,二者的夹角称为仪器常数,一般用△表示。如果陀螺仪子午线位于地理子午线的东边,△为正;反之,则为负。仪器常数△可以在已知方位角的精密导线边或三角网边上直接测出来,如图3所示精密导线边CD之地理方位角为Ao.若在C点安置陀螺全站仪,通过陀螺运转和观测可求出CD边的陀螺方位角αt,求出仪器常数:△=Ao-αt。如果已知仪器常数△和测得陀螺方位角αt,测定向边的地理方位角Ao关系为为:Ao=αt+△。
如图3所示地理方位角Ao和坐标方位角αo的关系为:Ao=αo+γo。子午线收敛角γo的符号可由安装仪器点的位置来确定,即在中央子午线以东为正,以西为负,其值可根据安置仪器点的高斯平面坐标求得。 需要求算的井下未知定向边,也就是要求出其坐标方位角αo,而不是地理方位角Ao,因此,αo=αt-△-γo。
四、陀螺定向测量的一般操作流程
在地面已知边上采用二或三测回测量陀螺方位角,求得两个仪器常数△1;在井下定向边上用二或三回测量陀螺方位角;返回地面后,要尽快在原已知边上再用二或三测回测量陀螺方位角,求得两个仪器常数△2;△1和△2差应值小于20″,仪器△1和△2平均数为本次观测仪器常数△;同一边任意两测回测量陀螺方位角的互差不得超过40″;井下同一定向边二或三次独立陀螺全站仪定向平均值的中误差为10",其互差不得超过40″;井上、下观测应由同一观测者进行,仪器在搬运时,要防止颠簸和震动;应在三天内完成。
五、逆转点法和中天法浅析与探讨
5.1、逆转点法
1、操作步骤。全站仪平稳精确跟踪逆转点(2个以上),大致测量出陀螺北方向,近似陀螺北偏差应小于60′;照准大致测量的陀螺北方向,下放陀螺,使其游標平稳摆动,用逆转点法开始通过全站仪平稳的精确跟踪逆转点,至少跟踪5个逆转点a1、a2…( 如图5),相邻摆动中值的互差不能超过20",间隔摆动中值的互差不能超过30";逆转点法测量完毕后,托起陀螺使陀螺处于完全锁紧位置,利用全站仪自带程序计算出陀螺北方向,再进行配盘,转动望远镜测量测线的陀螺方位角;通过逆转位读数计算摆动中值,检验观测精度。(相邻摆动中值的互差不能超过20",间隔摆动中值的互差不能超过30")。(如图5)
2、逆转点法优缺点。优点,全站仪跟踪游标在逆转位容易判断和在逆转位角度容易测量准确,是其操作过程简便;缺点,用转动全站仪(转动时会产生振动对游标产生影响)游标不平稳运行,对精度有影响。
3、提高观测精度的措施。实际下放陀螺使其摆幅在5-10格之间平稳摆动,观测仪器应尽量平稳跟中游标,不能骤然跟踪,否则测量出来的陀螺北方向不准确。
5.2中天法
1、中天法操作步骤。全站仪平稳精确跟踪逆转点(2个以上),大致测量出陀螺北方向,近似陀螺北偏差应小于60′;下放陀螺使其摆幅在8-10格之间平稳摆动,用中天法开始观测;至少测量2个周期( 如图6),相邻时间差的互差不能超过0.4s,间隔时间差的互差不能超过0.6s,中天法测量完毕后,托起陀螺使陀螺处于完全锁紧位置,定出陀螺北方向,转动望远镜测量测线的陀螺方位角;通过K值、摆幅和时间读数计算摆动中值,检验观测精度。
2、仪器常数K的测定
3、 在更换悬挂带后或者现测站与前测站纬度差较大时(超过500km距离)应当进行仪器常数的测定,一般在已知边实际测量和计算获得,测量计算出的K值与分划板刻度分化值、D摆幅和T所用时间有关。测量方法如下,取真北方向东10″-15″(N1)用中天法测量时间差△t1和摆幅a1,再取真北方向西10″-15″(N2),用中天法测量时间差△t2和摆幅a2,K=(N2-N1)\(a1*△t1-a2*△t2)
4、中天法优缺点
优点:不用转动全站仪(转动时会产生振动对游标产生影响)保证游标平稳运行;
缺点:得先精确定北方向,K随环境变化过大常需要实地测量计算,在游标经过中心位置速度过快,不易测量时间点,在测量时间上误差极大。
5、提高观测精度的措施。K值应当实地测定。下放陀螺使其摆幅在8-10格之间平稳摆动,下放速度及摆幅每测回都要一致。
5.3逆转点法与中天法改进
1、逆转点法和中天法的结合。陀螺全站仪定向尽管可以使用逆转点法和中天法都可以得到真北方向,但实测过程完全不同。为了保证定向精度使用中建议将两种方法测得的结果进行比较。上下应由同一个观测者用同一台仪器分别用两种方法观测,应先逆转点法测得的相对精确结果后再用中天法观测。两种方法有利有弊,应互相结合使用,这样才能为工程测量提供精确的方位角。
2、逆转点法观测时加测时间点。逆转点法观测时(不影响原观测方法),在开始跟踪和结束跟踪可以用秒表精确时间点,这样可以利用时间、分划板刻度分化值和测得的角度,计算分析求出的陀螺方位角,判断仪器情况和观测精度。
3、中天法观测加测摆幅。中天法观测(不影响原观测方法),在游标到达逆转位是精确读出分划板刻度(摆幅),这样可以利用时分划板刻度分化值和测得的时间,计算分析求出的陀螺方位角,判断仪器情况和观测精度。
总结:逆转点法和中天法在观测过程中加测时间和摆幅的方法,可得到有用数据,可以计算分析和提高陀螺方位角的精确。目前陀螺全站仪定向主要用于隧道竖井联系测量和隧道掘进过程中导线测量。陀螺全站仪定测量可以提高导线精度。本文在原有方法的基础上,提出加测摆幅和时间点的观测方法,最终获得高精度坐标方位角。
参考文献
[1]《于来法陀螺定向》,解放军出版社,1987年,作者:于来法
[2]《索佳GP1陀螺仪说明书 》 作者:卜飞