全潜式浮式风机基础在不同风况下的动力特性研究
2017-04-11 06:32丁红岩韩彦青3张浦阳乐丛欢
振动与冲击 2017年6期
丁红岩, 韩彦青3, 张浦阳, 乐丛欢
(1. 天津大学 水利工程仿真与安全国家重点实验室,天津 300072;2. 滨海土木工程结构与安全教育部重点实验室(天津大学),天津 300072;3. 天津大学 建筑工程学院,天津 300072)
全潜式浮式风机基础在不同风况下的动力特性研究
丁红岩1,2,3, 韩彦青3, 张浦阳1,2,3, 乐丛欢1,3
(1. 天津大学 水利工程仿真与安全国家重点实验室,天津 300072;2. 滨海土木工程结构与安全教育部重点实验室(天津大学),天津 300072;3. 天津大学 建筑工程学院,天津 300072)
综合半潜式、Spar式、张力腿式浮式风机基础的特点,提出一种新型全潜式浮式风机基础,并采用FAST软件耦合水动力-空气动力-控制系统-系泊系统对不同风况下的浮式风机及全潜式浮式基础的动力特性进行分析。分析结果表明全潜式浮式风机塔筒的自振频率及基础六自由度的自振频率能够较好的避开常见海浪的频率及风机运行频率1P、3P等。全潜式浮式风机在不同风况下具有较好的运动特性,全潜式浮式风机基础在不同风况下的横荡、垂荡、纵摇与风机在不同风速下受到的推力相关。
浮式风机;全潜式基础;湍流风;FAST;动力特性
在快速增长的风电建设当中,海上风电近年来成为焦点。未来海上风电更将向较深的海域(水深50~300 m)发展[1],但是按照目前海上风电场固定式基础结构,海上风电建设成本将会急剧增大。浮式风机基础作为未来海上风电发展的方向,逐渐受到人们的青睐。浮式风机基础可以分为三类:半潜式、Spar式(单立柱)以及张力腿式[2]。其中,半潜式主要依靠其较大的水线面来维持浮式风机正常工作所需要的稳性,但是这样就会使基础的尺寸较大,增加结构的建造成本;Spar式基础的重心比浮心低,因此能在海水中保持稳定,但是由此带来的一个缺点就是基础的吃水增大,适用水深范围较小;张力腿式基础主要依靠多根张力筋腱与海床相连,通过筋腱提供的张力来保证稳性。国内外学者对浮式风机基础的研究重点主要集中在新型的基础型式及其在各种海况下的运行稳定性研究。挪威国家石油公司Statoil提出一种Spar式浮式风机基础Hywind[3],并对其进行了数值模拟、模型试验及原型试验研究。WindFloat是一种半潜式浮式风机基础,由RODDIER等[4]提出,WindFloat由三个立柱组成,其中一个立柱上安装有5MW风机;研究及原型试验表明该基础系泊及安装费用较少,且可整机拖航。MIT及美国可再生能源实验室提出了一种新型TLP型浮式风机基础MIT/NREL TLP,并对其进行了系统的研究,研究表明该基础在风浪流作用下的运动特性较好,发电效率较高[5]。唐友刚等人对半潜式及Spar式风机基础也进行了相关研究,其研究较多的关注基础在水动力下的运动响应,忽略了上部风荷载的动力影响[6]。
本文结合三种浮式风机基础型式的优点,提出一种新型的浮式基础型式,即全潜式浮式风机基础。本文采用FAST[7](fatigue,aerodynamics,structures,turbulence)软件耦合水动力-空气动力-控制系统-系泊系统研究了全潜式浮式风机基础的自振频率及其在不同风况下的动力特性,研究表明基础的自振频率能够避开风机运行频率1P和3P等;得到了浮式风机及其全潜式浮式基础的动力特性。
1 全潜式浮式风机基础
1.1 基础型式
全潜式浮式风机基础包括立柱、立式浮箱、卧式浮箱、撑杆、锚链组成。如图1所示,四个立式浮箱及四个水平浮箱在风机运行工况下全部淹没在平均海平面以下,立式浮箱上表面位于海平面以下8 m,为浮式风机的主要浮力来源;单个立柱位于四个浮箱的中心,其上部与风机的塔筒相连,并于通过圆撑杆及横撑与浮箱连成一个整体;全潜式浮式风机及基础通过四组系泊缆(每组两根)与海床相连,基础的具体参数见表1。全潜式浮式风机基础具有以下特点:
(1)如图2所示,拖航运输工况下基础吃水较浅,如同半潜式基础,可连同上部风机一起整体浮运拖航,浮运拖航稳性由基础拖航工况下较大的水线面提供。
(2)在位状态下,基础的水线面面积小,如同Spar型基础,波浪荷载较小;浮箱顶部距离水面较大, 受波浪影响小(见图1)。
(3)在位状态下,基础通过张紧的锚链与海床相连,如同张力腿式基础,整体运动性能较好,结构内部受力较小,发电稳定。

图1 在位状态下的全潜式浮式风机基础Fig.1 Submersible foundation for floating wind turbine in operation condition
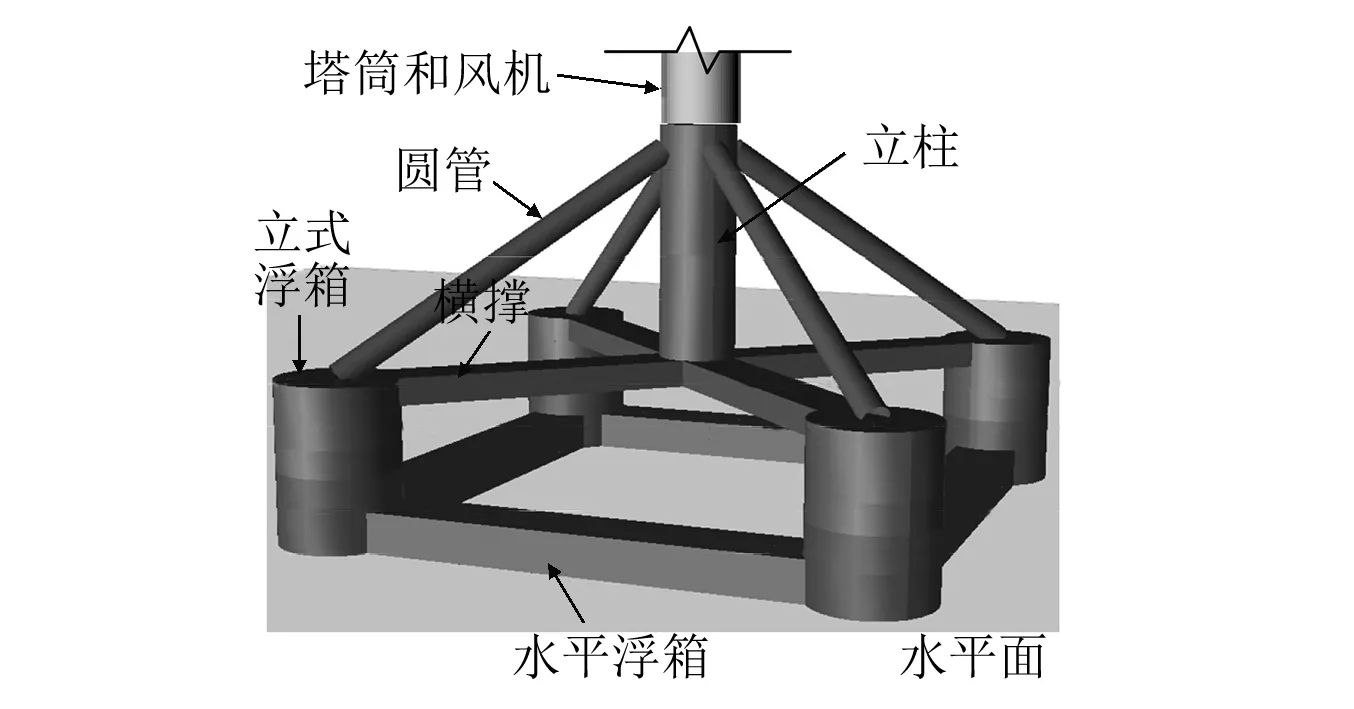
图2 拖航工况下的全潜式浮式风机基础Fig.2 Submersible foundation in towing condition

参数数值基础吃水/m20.0立柱直径/m6.0立式浮筒直径/m9.0立式浮筒高度/m12.0立式浮筒中心间距/m40.0水平浮筒宽度和高度/m5.0,3.0基础质量/kg2.734×106基础排水体积/m36114.0基础重心距水面距离/m-16.79基础横摇转动惯量/(kg·m2)7.62×108基础纵摇转动惯量/(kg·m2)7.62×108基础艏摇转动惯量/(kg·m2)1.36×109
图3所示为全潜式浮式风机基础与MIT/NREL TLP的对比:MIT/NREL TLP质量为全潜式浮式风机基础质量的3倍,排水体积前者为后者的2倍,即MIT/NREL TLP在材料用量上要高于全潜式基础。在位吃水前者约为后者的2.4倍,说明全潜式基础适用浅水水域的范围更大。可整机拖航运输为全潜式浮式风机基础和MIT/NREL TLP的设计理念之一,全潜式浮式风机整机拖航时吃水为5.76 m,而MIT/NREL TLP在整机拖航时吃水为35.7 m,不适宜浅水航道。在整机拖航时,全潜式浮式风机的定倾中心高度为MIT/NREL TLP的4.2倍。
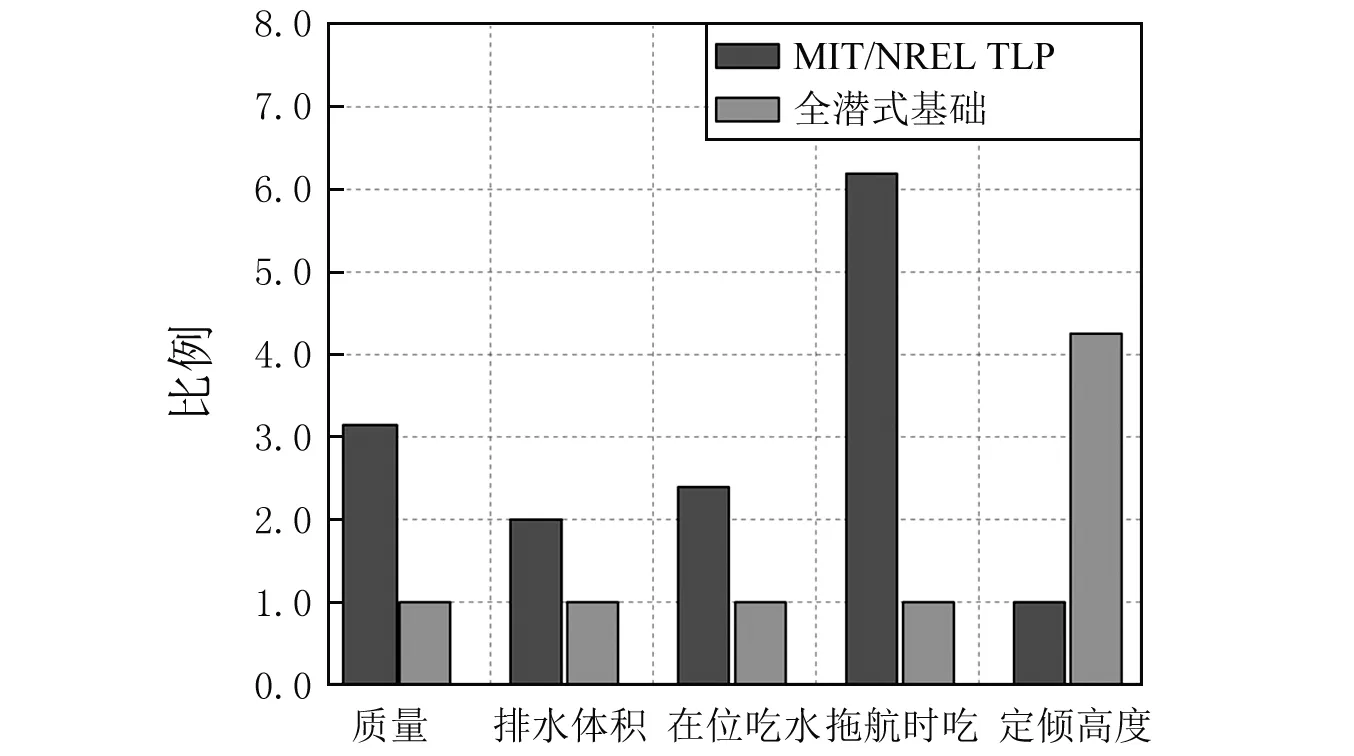
图3 全潜式浮式风机基础特性与MIT/NREL TLP对比Fig.3 Comparisons of characteristics between submersible foundation and MIT/NREL TLP
1.2 风机及系泊系统参数
全潜式浮式基础上部的风机选取NREL-5MW风机,其具体参数如表2。系泊系统采用4组共8根系泊缆对称布置,其具体参数参考文献[9],如表3所示。

表2 NREL-5MW浮式风机参数[8]Tab.2 Parameters of the NREL-5MW floating wind turbine

表3 系泊缆参数Tab.3 Parameters of mooring system
2 计算理论
2.1 荷载理论
(1)湍流风的生成
海上浮式风机受风面积大,且对风很敏感。风产生具有重要影响的平均作用力,同时也会引起频率范围很大的动荷载。但是,目前一些研究浮式风机的学者却对风荷载对浮式风机基础的运动影响关注很少。多数研究者将其等效成定常力。这对于研究浮式风机基础运动是不准确的。
Turbsim软件[10]可以模拟随机的、全域的湍流风。通过在频域内定义三个方向的风速谱及空间相关性,经过傅里叶逆变换生成湍流风速时间序列作为风荷载的输入。本文选取IEC 61400-3规范[11]中的Kaimal模型,三个方向的风速谱为:
(1)
式中,K=u,v,w为三个方向的风速,f为风的频率,LK为整体尺度参数。
(2)
式中,湍流尺度参数ΛU=0.7·min(60,HubHt),HubHt为轮毂高度。
(2)叶片气动荷载
湍流风作用于风机叶片上的气动荷载采用Aerodyn软件计算。Aerodyn软件基于叶素动量理论和动态尾流模型,能较为准确的计算出作用于风机叶片上的气动荷载。
(3)塔筒风荷载
作用于风机塔筒上的风荷载通过下式求得:
(3)
式中,F为作用在塔筒上的风荷载,ρ为空气密度,D为塔筒直径,L为塔筒长度,CD为空气拖曳系数,V为瞬时风速。
(4)波浪荷载
全潜式浮式风机基础中的浮箱及立柱部分受到的波浪荷载通过势流理论计算得到;而基础中的支撑圆管受到的波浪力采用莫里森公式计算[12]。
2.2 海上浮式风机运动方程
海上浮式风机在风浪作用下的运动方程如下:
(j=1,2,3,4,5,6)
(4)
式中:Mjk为结构质量矩阵,包括结构质量和质量惯性矩;Ajk是附加质量矩阵分量;Bjk为结构阻尼矩阵;Cjk为结构的回复刚度矩阵,恢复矩阵由静水恢复刚度矩阵和系泊力恢复刚度矩阵组成;Fj为浮式风机系统受到的外界荷载,包括风荷载,波浪荷载,系泊荷载等。
3 全潜式浮式基础的运动特性
3.1 计算模型
本文采用FAST软件,耦合水动力-空气动力-控制系统-锚链系统对海上浮式风机进行模拟,模拟时长为800 s,浮式风机所在海域水深设置为200 m,坐标系如图4所示。
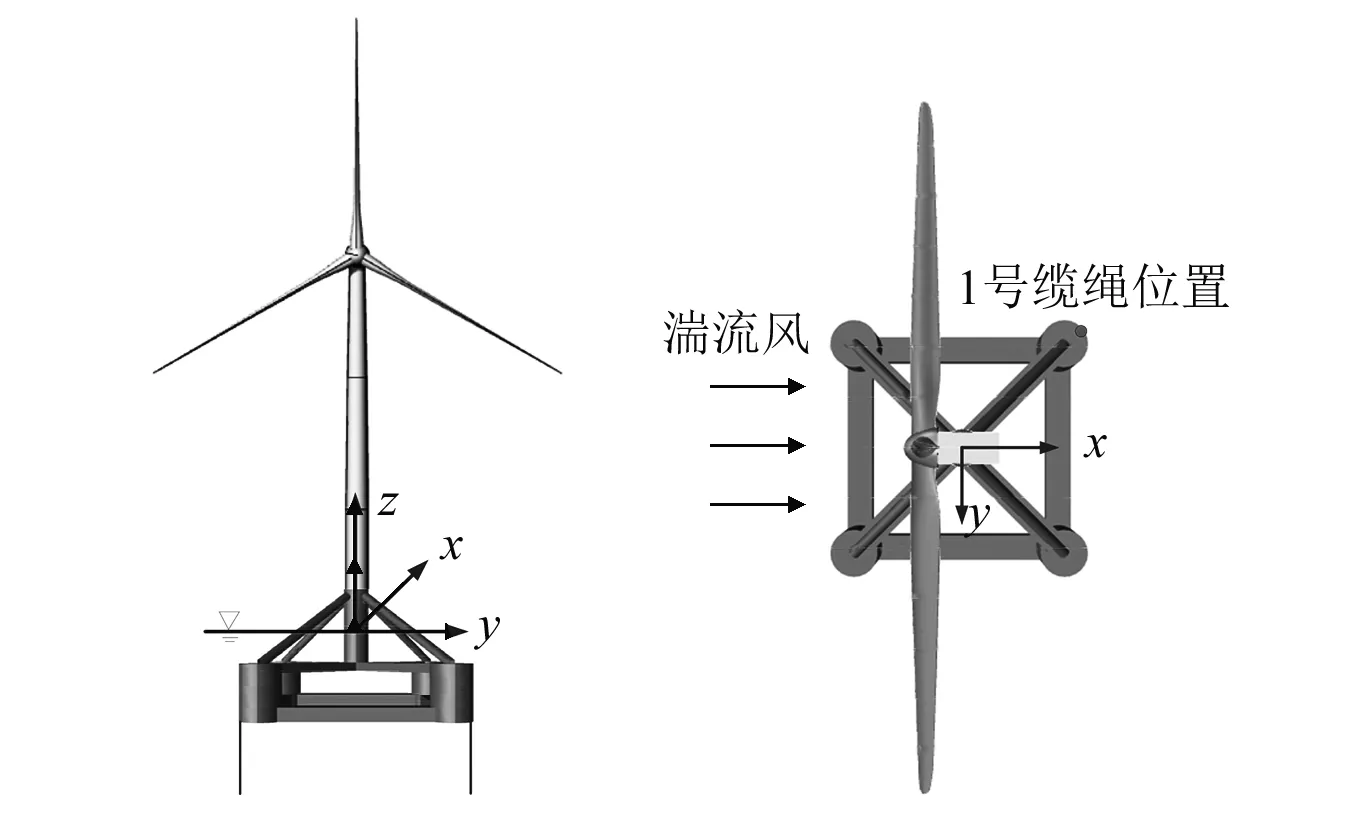
图4 全潜式浮式风机基础坐标系Fig.4 Coordinate system of the submersible foundation
(1)风况
分别模拟平均风速为3、8、11.4、18、25 m/s的全域湍流风,记为风况1~5,即切入风速、低于额定风速、额定风速、高于额定风速和切出风速。风况2下的三个方向的湍流风时间序列如图5,风况1~5下x方向的湍流风时间序列如图6。

图5 风况2三个方向的湍流风速Fig.5 Three dimensional turbulent wind speed of wind condition 2

图6 风况1-5下x方向湍流风速Fig.6 Turbulent wind speed of condition 1-5 in x-direction
(2)波浪
模型选取波高为4 m,周期为8 s的规则波进行模拟,全潜式浮式风机基础的附加质量系数、阻尼系数及一阶波浪力系数通过WADAM软件[13]求得,并作为FAST软件的水动力输入文件。
(3)控制系统
在风况1~4情况下,浮式风机的控制系统采取变桨、变速控制;而在风况5情况下,风速达到风机的切出风速,控制系统采取定时顺桨控制,即在模拟100 s时风机叶片变为顺桨。
3.2 自振频率
(1)全潜式浮式风机的自振频率
考虑附加质量,势流阻尼,静水回复刚度及系泊刚度在内的全潜式浮式风机的自振频率如表4、5。全潜式浮式风机系统的坎贝尔图如图7。全潜式浮式风机结构及六自由度运动的自振频率均能较好的避开常见的海浪频率和风机运行的1P(0.2 Hz)、3P(0.6 Hz)等[14]。

图7 全潜式浮式风机坎贝尔图Fig.7 Campbell diagram of tower and foundation

一阶塔架前后振动一阶塔架左右振动二阶塔架前后振动二阶塔架左右振动频率/Hz0.8800.7932.5402.036

表5 全潜式浮式基础的自振频率Tab.5 Natural frequency of the submersible foundation
3.3 不同风况下全潜式浮式风机动力特性
不同风况下,浮式风机的运行状态不同。本文模拟了风机在切入风速,低于额定风速,额定风速,高于额定风速及切出风速风况下的浮式风机及全潜式基础的动力特性。主要包括浮式风机的发电功率、基础横荡、垂荡、纵摇运动及缆绳拉力的变化。
图8所示为浮式风机在不同风况下的发电功率的变化。由图中可以看出,在风况1即切入风速下,发电功率较小;在风况2下,浮式风机的发电功率未达到额定发电功率,功率变化幅度较大;在风况3下,虽然平均风速为11.4 m/s,但是由于湍流风速的波动特性,风机的发电功率随着风速的变化同样出现很大的波动;在风况4下,浮式风机的发电功率达到额定功率,风机运行稳定;在风况5下,由于湍流风的波动,瞬时风速可能超过30 m/s,风机控制系统在100 s时将风机叶片变为顺桨,风机的发电功率在100 s时变为在0 kW处波动。
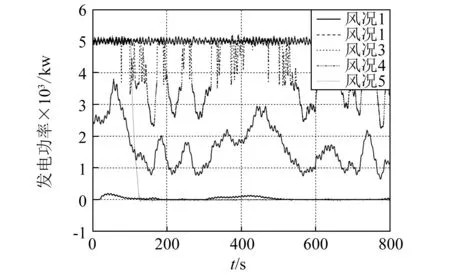
图8 不同风况下的发电功率Fig.8 Power of the wind turbine in different wind conditions
风机受到的推力与风速相关,如图9[15]。全潜式浮式风机基础运动随着推力的变化而变化,同时也影响着风机的发电效率及风机结构的内力。图10~15为全潜式浮式风机基础横荡、垂荡及纵摇运动及其随风速的变化规律。由于模拟的湍流风风向为x方向,湍流风在y方向的速度分量较小,所以全潜式浮式风机基础的纵荡、横摇及艏摇变化较小,在本文中未一一列出。
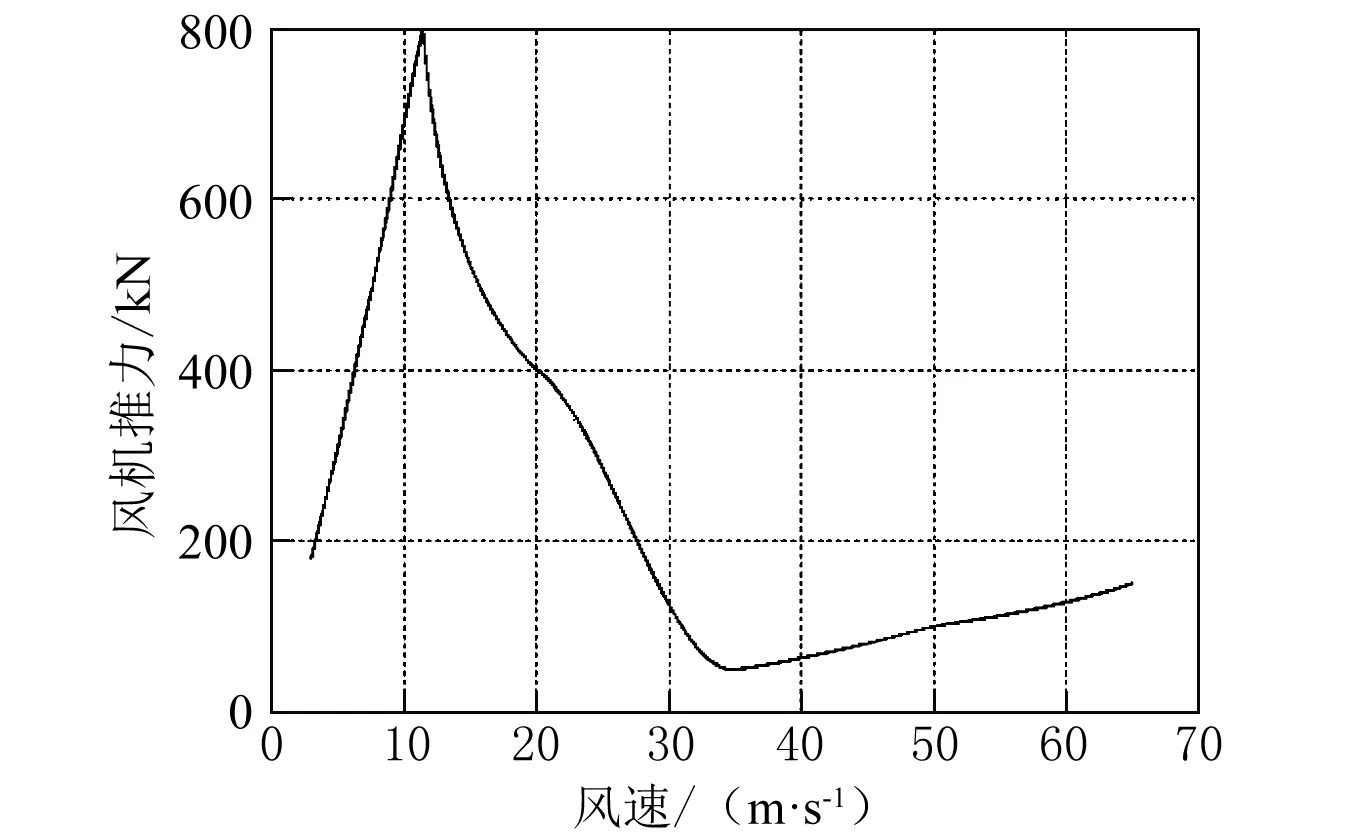
图9 风机推力曲线Fig.9 Thrust force curve

图10 基础不同风速下的横荡Fig.10 Surge of the submersible foundation

图11 基础不同风速下的横荡统计Fig.11 Surge statistics of the submersible foundation
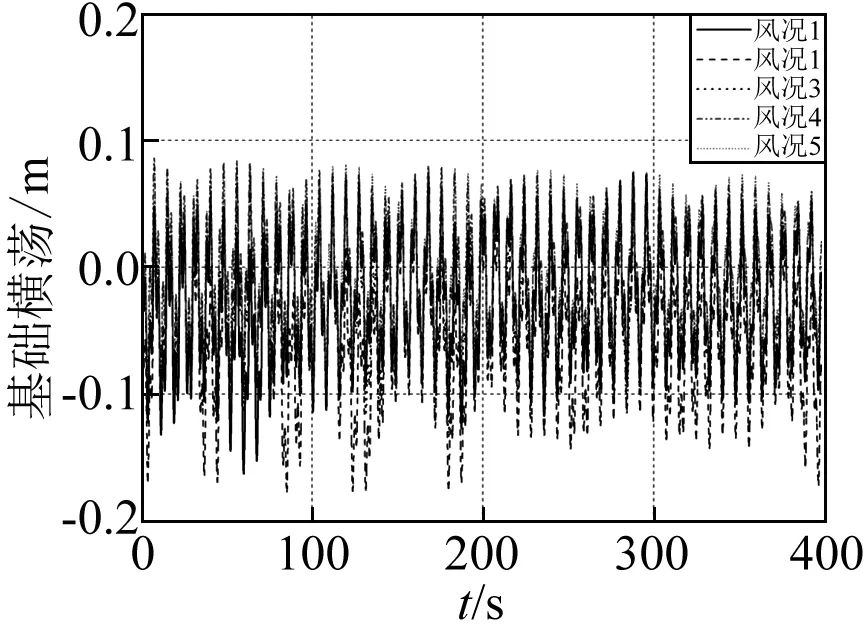
图12 基础不同风速下的垂荡Fig.12 Heave of the submersible foundation

图13 基础不同风速下的垂荡统计Fig.13 Heave statistics of the submersible foundation

图14 基础不同风速下的纵摇Fig.14 Pitch of the submersible foundation

图15 基础不同风速下的横荡统计Fig.15 Pitch statistics of the submersible foundation
由图10可以看出,全潜式浮式风机基础在风况3下横荡最大,最大横荡位移达到6.3 m,在风况1、2、4下的横荡位移较小,最大值分别为0.2 m、5.3 m和4.6 m,这是由于风机在不同风速下受到的推力不同引起的:在切入风速及低于额定风速下,风机受到的推力较小,额定风速时风机受到的推力达到最大,而高于额定风速时,风机受到的推力减小;在风况5下,全潜式浮式风机基础的横荡在前100 s内较大,最大值为3.1 m,100 s后减小为1 m左右,这是由于控制系统将叶片变为顺桨,减小了风机受到的水平推力。图11所示为全潜式浮式基础的横荡与同样海况下MIT/NREL TLP横荡运动的对比,可以看出,全潜式浮式风机基础在各风况下的横荡变化规律与MIT/NREL TLP的变化规律相同,且两者横荡位移的最大值与最小值相差不大。浮式风机基础横荡运动的同时,将会受到系泊缆绳的回复拉力,同时引起基础垂直方向上的运动,如图12所示,由于全潜式浮式基础在风况3下横荡位移较大,故基础的垂荡变化的幅度也较为明显,最大垂荡位移为-0.18 m。图13所示,由于MIT/NREL TLP质量大于全潜式浮式基础,在不同风况下的其垂荡最大值与最小值均略小于全潜式基础。如图14所示,基础在不同风况下纵摇角的变化规律与基础横荡位移的变化规律相似,即基础在风况3情况下纵摇最大为0.34°,在风况1、2、4下的纵摇角较小。图15所示,全潜式基础在不同风况下的纵摇角最大值略大于MIT/NREL TLP,但是全潜式基础纵摇角最小值小于后者,在0°附近波动。
图16为全潜式浮式风机基础系泊缆绳的拉力变化。图17为1号缆绳拉力在各风况下的统计,1号缆绳位于浮式风机的下风向,其在不同风况下的变化同基础的横荡具有相反的规律:即在风况3情况下,缆绳拉力较小,在风况1、2和4情况下,缆绳拉力变大;基础的横荡引起下风向系泊缆绳拉力的减小,上风向系泊缆绳拉力增加;在风况5情况下,100 s后缆绳拉力有小幅增加,这是由于顺桨控制后,浮式风机受到的推力减小,基础横荡位移减小,下风向系泊缆绳张紧,拉力增加。

图16 1号缆绳拉力Fig.16 Tension of the mooring line 1

图17 1号缆绳拉力统计Fig.17 Tension statistics of the mooring line 1
4 结 论
本文综合三种浮式风机基础的优点提出一种新型全潜式浮式基础,并耦合水动力-空气动力-控制系统-系泊系统对全潜式浮式基础及其支撑的NREL-5MW风机的动力特性进行分析。分析表明,全潜式浮式风机的自振频率能够较好的避开常见的海浪频率及风机自转引起的振动频率。全潜式浮式风机在不同风况下具有较好的运动特性,全潜式浮式风机基础在不同风况下的横荡、纵摇与风机在不同风速下受到的推力相关。
[ 1 ] ARAPOGIANNI A, GENACHTE A B, OCHAGAVIA R M, et al. Deep water—the next step for offshore wind energy[C]∥European Wind Energy Association. Brussels, Belgium: EWEA, 2013: 978-2.
[ 2 ] JONKMAN J M, MATHA D. A quantitative comparison of the responses of three floating platforms[M]. Golden, CO: National Renewable Energy Laboratory, 2010.
[ 3 ] STIESDAL H. Hywind: The world’s first floating MW-scale wind turbine[J]. Wind Directions, 2009,5: 52-53.
[ 4 ] RODDIER D, CERMELLI C, AUBAULT A, et al. WindFloat: A floating foundation for offshore wind turbines[J]. Journal of Renewable and Sustainable Energy, 2010, 2(3): 033104.
[ 5 ] JONKMAN J M, MATHA D. Dynamics of offshore floating wind turbines—analysis of three concepts[J]. Wind Energy, 2011, 14(4): 557-569.
[ 6 ] 唐友刚, 桂龙, 曹菡, 等. 海上风机半潜式基础概念设计与水动力性能分析[J]. 哈尔滨工程大学学报, 2014(11): 3. TANG Yougang , GUI Long, CAO Han, et al. Conceptual design and hydrodynamic performance of the semi-submersible floating foundation for wind turbine[J]. Journal of Harbin Engineering University, 2014(11): 3.
[ 7 ] JONKMAN J M, BUHL Jr M L. FAST user’s guide[R]. Golden, CO: National Renewable Energy Laboratory, 2005.
[ 8 ] BUTTERFIELD S, MUSIAL W, SCOTT G. Definition of a 5-MW reference wind turbine for offshore system development[R]. Golden, CO: National Renewable Energy Laboratory, 2009.
[ 9 ] MATHA D. Model development and loads analysis of an offshore wind turbine on a tension leg platform with a comparison to other floating turbine concepts: April 2009[R]. Golden, CO: National Renewable Energy Laboratory (NREL), 2010.
[10] JONKMAN B J. TurbSim user's guide: version 1.50[R]. Golden, CO : National Renewable Energy Laboratory, 2009.
[11] International Electrotechnical Commission. IEC 61400-3 Wind Turbines-Part 3[S]. Switzerland, 2009.
[12] 福尔特森. 船舶与海洋工程环境荷载[M]. 杨建民, 肖龙飞,葛春花,译. 上海: 上海交通大学出版社, 2008.
[13] WADAM. Wave analysis by diffraction and Morison theory[M]. Det Norske Veritas, Høvik: SESAM user manual. 2010.
[14] 董霄峰, 练继建, 杨敏,等.谐波干扰下海上风机结构工作模态识别[J]. 振动与冲击,2015,34 (10):152-156. DONG Xiaofeng, LIAN Jijian, YANG Min, et al. Operational modal identification of an offshore wind turbine structure under harmonic interference[J]. Journal of Vibration and Shock, 2015,34 (10):152-156.
[15] LYGREN J E L. Dynamic response analysis of a tension-leg floating wind turbine[D]. Trondheim: Norwegian University of Science and Technology, 2011.
Dynamic analysis of the submersible foundation for floating wind turbine in different wind conditions
DING Hongyan1,2,3,HAN Yanqing3,ZHANG Puyang1,2,3, LE Conghuan1,3
(1. State Key Laboratory of Hydraulic Engineering Simulation and Safety, Tianjin University, Tianjin 300072, China; 2. Key Laboratory of Coast Civil Structure Safety (Tianjin University), Ministry of Education, Tianjin 300072, China; 3. School of Civil Engineering, Tianjin University, Tianjin 300072, China)
Synthesizing the advantages of the semi-submersible, Spar and TLP types of floating offshore wind turbine foundations, a new type of submersible foundation for floating wind turbines was put forward. A coupled dynamic analysis of the wind turbine and its submersible foundation in different wind conditions was carried out by using the FAST software. The results show that the natural frequencies of the tower combined with the submersible foundation are of no coincidence with the normal wave frequencies and the 1P and 3P operating frequencies of the wind turbine. The surge and pitch of the submersible foundation are correlated with the wind turbine thrust force in different wind conditions.
floating wind turbine; submersible foundation; turbulent wind; FAST; dynamic analysis
国家自然科学基金资助项目(51309179);天津市应用基础与前沿技术研究计划(13JCYBJC19100);天津市应用基础与前沿技术研究计划(14JCQNJC07000)
2015-08-17 修改稿收到日期:2016-02-02
丁红岩 男,博士,教授,1963年生
乐丛欢 女,博士,副教授,1983年生
P751;P752
A
10.13465/j.cnki.jvs.2017.06.031
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
空气动力学学报(2020年1期)2020-11-29
重型机械(2020年2期)2020-07-24
建材发展导向(2019年10期)2019-08-24
船海工程(2015年4期)2016-01-05
国外科技新书评介(2014年12期)2015-01-05
国外科技新书评介(2014年5期)2014-12-17
船海工程(2013年6期)2013-03-11
船海工程(2013年6期)2013-03-11