
电力巡线无人机机载电磁场检测系统设计
2017-04-14 05:13杨蔚,刘玮,赵强,杜毅
成都大学学报(自然科学版) 2017年1期
杨 蔚, 刘 玮, 赵 强, 杜 毅
(四川省电力公司 检修公司, 四川 成都 610031)
电力巡线无人机机载电磁场检测系统设计
杨 蔚, 刘 玮, 赵 强, 杜 毅
(四川省电力公司 检修公司, 四川 成都 610031)
针对高压输电线的电磁场辐射对电力巡线无人机带来的安全隐患问题,设计了一种机载电磁场检测系统,能够检测出无人机与高压输电线在不同距离时的电场和磁场强度.测试结果表明,系统所测得的电磁场强度与无人机和高压输电线的距离成线性关系.检测数据通过无线传输到地面控制中心或直接提供给无人机飞控处理单元,便于实现对无人机的安全飞行控制,对无人机在巡线作业时保持安全距离起到了非常重要的作用.
电磁辐射;电力巡线;电磁场检测
0 引 言
为了保障高压输电线路长期稳定运行,作业人员需要定期对高压输电设备进行巡检作业.由于架空输电线路覆盖范围区域广,穿越区域地形复杂以及自然环境恶劣,作业人员巡检时,需要亲临高压铁塔塔底进行观测,这将严重危及到作业人员的安全[1].近年来,无人机巡检以其无需作业人员亲临塔底、效率高、无巡检“盲区”等优势得到了广泛应用[2].但是,采用无人机沿高压输电线巡检作业时,高压电源产生的电场和磁场易对无人机的机载电子设备造成干扰,而不能正常工作,导致无人机发生姿态失衡、定点悬停偏离与漂移、飞行脱离控制以及严重时撞击输电线路及坠机等事故.针对这一问题,本研究设计了电力巡线无人机机载电磁场检测系统,通过设计电磁场感测单元检测电路的电场和磁场强度,测量数据经处理后通过无线传输到地面飞控中心或无人机飞控系统,从而引导无人机进行安全巡线作业.
1 系统工作原理
本机载电磁场检测系统由机载模块、无线收发模块和PC机管理软件3部分组成.机载模块负责采集高压输电线路电场和磁场强度、方向信息,并对数据进行处理,处理的结果传给无人机飞控.同时,结果还通过无线收发模块传给地面端,经过地面端管理软件处理后,无人机所处电场和磁场强度、方向信息以及离高压输电线路的距离提供给无人机操控人员或无人机飞控单元,与此同时这些数据也会显示在PC机屏幕上.
2 系统硬件设计
机载模块位于无人机上,包含电磁场感测单元、信号调理单元、控制处理单元和无线发送单元.电磁场感测单元主要通过设计专用的电磁场感测装置完成对电场和磁场强度的感测.信号调理单元主要完成对传感器单元感测的信号进行滤波、A/D变换.控制处理单元是机载模块控制和数据处理的核心.经过采集和处理后的数据通过无线发送单元发送到地面无线接收模块,机载无线发送单元采用与地面无线收发单元相同的模块.机载模块的组成框图如图1所示.

图1 机载模块的组成框图
2.1 电场感测单元设计
处于交变电场中的电容器,在其表面会产生感应电荷,从而在电容器的两极板上形成电压差,该电压差能够反映电场的强度大小[3-4].
本系统的电场传感器采用平行板电容传感器作为电场感测元件.由于要采集的高压线路电场是空间交变电场,因此,除了需要测量电场大小外,还需要测量电场的方向.
系统中,1个立方体装置上的6个表面上放置电容极板,从而形成3个相互正交放置的电容器来测量3个正交方向上的电场强度,并据此计算出电场的方向.电场感测单元器结构图如图2所示.

图2 电场感测单元结构图
2.2 磁场感测单元设计
对交变磁场测量方法通常有霍尔效应法、电磁感应法、磁光效应法和磁阻效应法[5].
本系统采用霍尔效应法.置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,在载流导体上垂直于电流和磁场的方向上将产生霍尔电动势.霍尔电势的大小与磁场强度成正比.
本研究采用线性霍尔元件作为磁场感测元件.由于高压线路周围的磁场为交变磁场,本系统中1个立方体装置的6个表面上放置霍尔元件,6片霍尔元件采用差动输出方式,每相对2片灵敏度相同的霍尔元件为1组,一正一反分别贴于正六面体相对的面上,即在探头的X、Y、Z轴线上对称分布,与O点等距,输出信号为单一放大器的2倍,这样输出的信号零漂小,同时减少了因测试环境温度变化所带来的温度误差.此种结构可以得到3个正交方向上的磁场强度,并据此计算出磁场的方向.磁场感测单元结构如图3所示.

图3 磁场感测单元结构图
2.3 控制处理单元设计
控制处理单元主要完成的功能包括:接收传感器的测量数据,对数据进行处理运算;通过串口将数据运算处理后的数据发送到无线收发单元,并且接收地面PC机的控制指令;具有定期的自检能力.
本研究选择意法半导体公司的STM32F103作为控制处理器.STM32F103是基于高性能的ARM Cortex-M4 32-bit RISC内核,工作频率为68 MHz.
处理器STM32F103具有XX个12-bit A/D转换器,因此,在本方案中,电磁场检测装置采集到的电磁场强度模拟信号直接输入到STM32F103,由其内部的A/D转换器进行数字化处理.
处理器STM32F103通过UART异步串行通信接口与无线收发单元进行数据交互.波特率为19.2 K,包含1个起始位和1个停止位,无奇偶校验.
2.4 无线收发模块设计
本系统中,机载无线收发单元和地面无线收发模块均采用AS62-T30无线传输模块,它是一款433 MHz、1 W功率、高稳定性、工业级的无线数传模块.模块采用SX1278主芯片,LORA扩频传输,TTL电平输出,兼容3.3 V与5 V的I/O口电压.该模块采用高效的循环交织纠错编码算法,其编码效率高,纠错能力强,在突发干扰的情况下,能主动纠正被干扰的数据包,最大连续纠错64 bit,大大提高了模块的抗干扰性和传输距离,而在没有采用纠错算法的情况下,这种出错的数据包只能被丢弃.LORA扩频使模块具有更远的通信距离.
3 系统软件设计
系统的电磁场测量工作流程如下:延时开机后系统进行初始化,完成各个模块电路的自检,然后处理器开始对测得的表征电磁场强度的电压信号进行A/D转换.软件检测A/D采样是否完成,若完成,则由处理器读取数据,启动与无线收发单元的串行通信,将数据发送到无线模块.与此同时,对数据进行分析,根据设定的报警限值判断是否过限并发出警示信号.处理器采用定时器方式实现A/D转换、场强过限判断,程序通过不断的循环来实现不间断测量.主程序流程图如图4所示.
4 测 试
4.1 模拟测试
在现场测试之前,为满足实际工程需要,减小系统的测量误差,保证外部工频电场与电场传感器的输出具有良好的线性度,需要对电场传感器的线性度进行校正.模拟校正示意图与实际搭建图如图5所示.
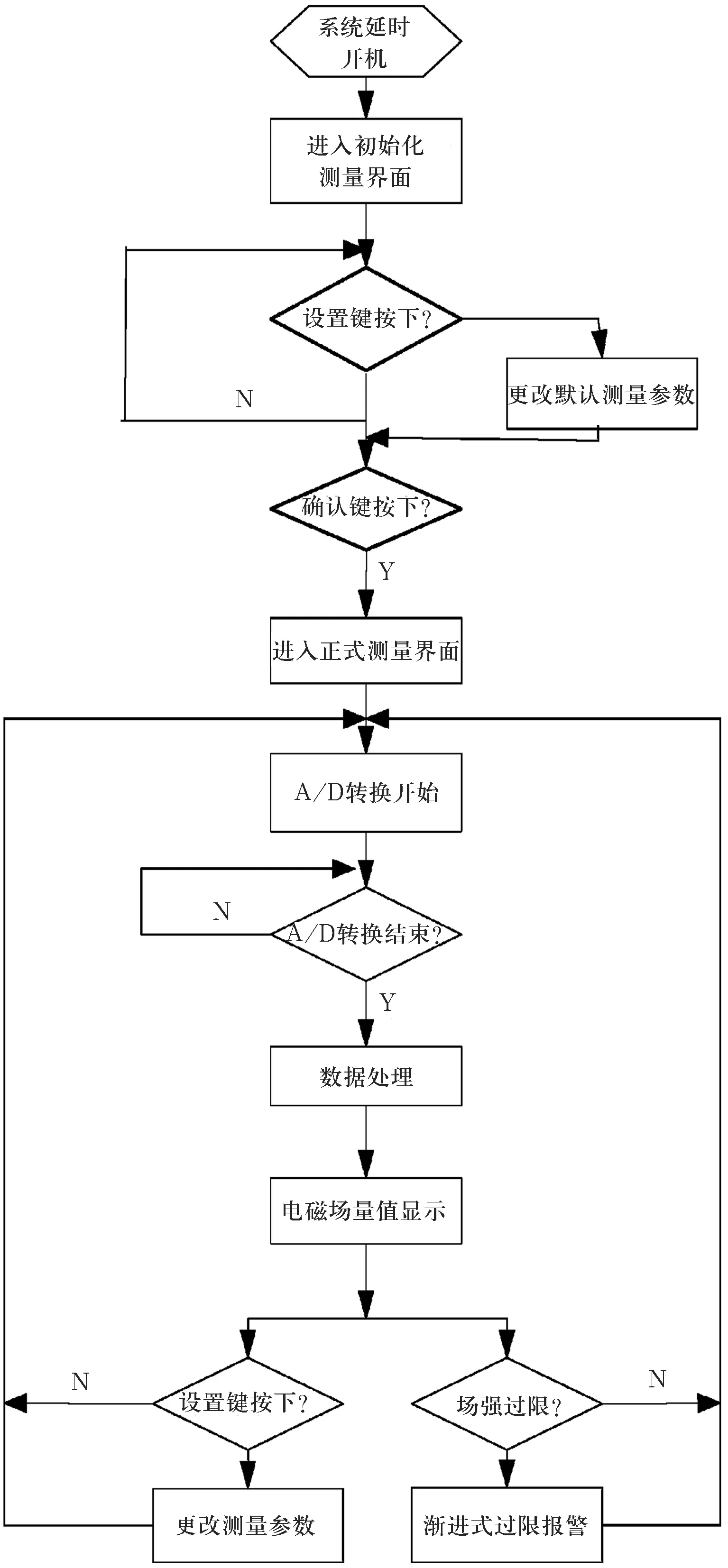
图4 电磁场测量主程序流程图

图5 模拟校正示意图及实际搭建图
本校验系统采用平行板电极的有效边长为400 mm,极板有效间距离为100 mm,符合国标GB/T 12720-91的要求.由均匀场强公式E=U/d计算出电极间工频电场的有效值,调节电压大小使两平行板电极之间的电场从2.5 kV/m增大到20 kV/m,工频电场校正系统测试曲线如图6所示.图6中,直线是计算的理论值直线,点是实际测试的数据值.

图6 工频电场校验系统测试曲线
从图6可知,本系统所设计的电场感测装置的线性度好,可以用于实际环境的测量.
4.2 现场测试
本系统在某500 kV高压输电线路进行了现场测试.该段输电线路的基本参数是:导线为四分裂导线,三角形排列;中相距离地面高度为27 m,边相距离地面高度为23 m;边相与中相的水平间距为3 m.测量当天天气阴云,气温为21 ℃,相对湿度为45%.此次测试,在电网公司配合下,综合利用激光测距技术和卫星定位技术,在高压线水平面垂直高度5 m到50 m不同水平距离位置,测量无人机的电磁场强度,并观察无人机是否准确预警.测试的数据如图7所示.

图7 测试数据曲线图
对数据进行处理,并和实际距离对比,如图8所示.图8中,曲线a是电场强度映射的距离和实际距离对比,曲线b是磁场强度映射的距离和实际距离对比.

图8 不同距离测试点电场和磁场强度距离对比
5 结 论
测试结果显示,电力巡线无人机机载电磁场检测系统能够对高压输电线路的电磁场辐射强度进行测量,测量数据的变化趋势能够反映出无人机与高压输电线距离的远近.当检测数据超过了所设定的预警阈值时,能够给出报警.
本电磁场检测系统应用于无人机高压电缆巡线作业中,对无人机在巡线作业时保持与高压输电线的安全距离起到非常重要的作用.
[1]彭向阳,刘正军,麦晓明,等.无人机电力线路安全巡检系统及关键技术[J].遥感信息,2015,30(1):51-57.
[2]徐华东.无人机电力巡线智能避障方法研究[D].南京:南京航空航天大学,2014.
[3]汪金刚,林伟,李健,等.电容式交变电场传感器与工频电场检测试验研究[J].传感器与微系统,2010,29(9):21-24.
[4]何友,王宏国,路大鑫,等.多传感器信息融合与应用[M].北京:电子工业出版社,2001.
[5]雪原.智能三维磁场测量仪的研究[D].南京:南京理工大学,2012.
Detecting System Design of UAV Airborne Electromagnetic Field of Power Line Patrol
YANGWei,LIUWei,ZHAOQiang,DUYi
(Overhaul Company, State Grid Sichuan Electric Power Company, Chengdu 610031, China)
Aiming at the safety problems caused by the influence of the electromagnetic field radiation of the high voltage transmission line on power line patrol UAV,the airborne electromagnetic field detecting system is designed.It can detect the intensity of both the electric field and the magnetic field when UAV and the high voltage transmission line are at different distances.The test results show that the intensity of the electric field and the magnetic field measured by the system is in linear relation with the distance between the UAV and the high voltage transmission line.The detecting results are sent to the control center or directly to the UAV flight control unit through wireless transmission,which is conducive to the control of the safe flight of the UAV.This system will play a very important role in helping UAV keep a safe distance during power line patrol.
electromagnetic radiation;power line patrol;detection of electromagnetic field
1004-5422(2017)01-0076-04
2016-12-07.
杨 蔚(1978 — ), 男, 工程师, 从事输电线路检修与无人机巡检技术研究.
TP274+.2
A
猜你喜欢
空间科学学报(2021年6期)2021-03-09
设备管理与维修(2020年2期)2020-03-24
广西电业(2020年11期)2020-03-23
商品与质量(2019年47期)2019-06-18
无人机(2018年1期)2018-07-05
农业科技与装备(2017年4期)2017-08-17
科技资讯(2017年3期)2017-03-25
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
电测与仪表(2016年16期)2016-04-12
物探化探计算技术(2015年2期)2015-02-28
