
基于状态识别的底盘稳定性集成控制
2017-04-14 05:13康小鹏董大伟
成都大学学报(自然科学版) 2017年1期
康小鹏, 董大伟, 李 磊
(1 成都大学 机械工程学院, 四川 成都 610106; 2.西南交通大学 机械工程学院, 四川 成都 610031; 3.西华大学 汽车与交通学院, 四川 成都 610039)
基于状态识别的底盘稳定性集成控制
康小鹏1,2, 董大伟2, 李 磊3
(1 成都大学 机械工程学院, 四川 成都 610106; 2.西南交通大学 机械工程学院, 四川 成都 610031; 3.西华大学 汽车与交通学院, 四川 成都 610039)
建立了整车7自由度整车模型及线性2自由度参考模型.利用车辆侧向加速度作为车辆进入非线性区的判定依据,设计了基于前轮主动转向与直接横摆力矩控制的底盘稳定性协调控制系统.引入附加横摆力矩分配系数对各子系统的工作状态进行决策并实现其介入程度的实时分配.以转向盘阶跃输入工况对协调控制系统在良好干燥路面上分别以60 km/h和120 km/h 2种情况下进行了仿真分析.结果表明,该控制系统在2种车速情况下控制效果良好.
状态识别,集成控制,前轮主动转向,直接横摆力矩控制,横摆力矩分配
0 引 言
随着汽车电子技术与控制理论的飞速发展,应用于汽车底盘的控制系统的种类越来越多,但各系统的大量功能相互影响和作用,且部分系统在功能上还存在重叠,这使得以前功能相对单一和独立的子系统之间需要相互通信、协调作用.目前,集成化控制已成为现代汽车底盘控制的主流趋势[1],其特点是用一个上层控制器协调分配中、下层控制器的控制程度与介入时机,在尽量不改变原有控制子系统独立结构的前提下,实现其控制功能协调运作[2].事实上,利用单一控制系统,如DYC、AFS等,对汽车底盘稳定性进行控制并不能适用于车辆全工况状态,且对侧向动力学的控制在一定程度上会影响车辆的纵向及垂向的动力学特性[3].对此,本研究基于车辆状态识别设计了一种车辆DYC与AFS的协调控制器,其可根据车辆不同行驶状态协调分配各子系统控制程度.
1 车辆模型
1.1 7自由度整车模型
本研究在MATLAB/Simulink平台下[4]搭建包含车辆纵向、侧向、横摆运动及4个车辆转动共7个自由度的整车模型.车辆受力如图1所示,其平衡方程式为:

图1 车辆受力示意图
1)纵向力平衡方程,
=(Fxfl+Fxfr)cosδ-(Fyfl+Fyfr)sinδ+Fxrl+Fxrr
(1)
2)侧向力平衡方程,
=(Fxfl+Fxfr)sinδ+(Fyfl+Fyfr)cosδ+Fyrl+Fyrr
(2)
3)绕Z轴力矩平衡方程,
(3)
4) 4个车轮的力矩平衡方程,
(4)
式中,δ为前轮转角;Vx,Vy分别为纵向、横向车速;β为质心侧偏角;γ为横摆角速度;Mz为附加横摆力矩;Fxi、Fyi分别为轮胎纵向力、侧向力、垂向力,i为对应的车轮,可以取为左前轮fl、右前轮fr、左后轮rl或右后轮rr;m为整车质量;a、b为前后轴到质心的距离;tw1为前轴轮距;tw2为后轴轮距;Iz为整车绕Z轴的转动惯量;Itw为车轮绕转动中心的转动惯量;ωi为对应车轮旋转角速度;Rw为车轮有效滚动半径;Tbi为对应车轮制动力矩,Tdi为对应车轮驱动力矩.
1.2 轮胎模型
本研究采用Dugoff轮胎模型[5],该模型利用轮胎刚度、滑移率等参数来描述轮胎力,适用于车辆动力学分析及控制系统研究[6].
(5)
(6)
(7)
(8)
滑移率定义分为制动和驱动2种情况.
1)制动.
(9)
2)驱动.
(10)
式中,Cxi,Cyi分为轮胎纵向刚度和侧偏刚度;si为轮胎滑移率;Ψi为轮胎动态参数;μ为路面摩擦系数;αi为车轮侧偏角;Fzi为轮胎法向载荷;ui为车轮纵向速度.
1.3 参考模型及控制变量
研究发现,车辆失稳或轨迹跟随能力差的主要原因是车辆的轮胎力处于非线性区.对此,本研究通过建立线性2自由度车辆模型作为参考模型[7]来确定车辆行驶时状态变量的理想值,并以此作为判断驾驶意图的依据.

(11)
式中,kf、kr为前后轴等效侧偏刚度.
车辆稳定性控制包含轨迹保持和稳定性,分别由车身质心侧偏角和横摆角速度来描述.质心侧偏角通常需要依赖观测器进行估算,其准确性和稳定性较差,而横摆角速度可由车辆传感器直接测量,因此被广泛用作为控制变量.线性2自由度车辆模型决定的横摆角速度虽然仅在车辆质心侧偏角很小的轮胎线性区内是准确的,但目前对车辆来说却是最稳定的,是驾驶员比较容易掌握的转向特性,具有很好的操纵稳定性能.因而,由2自由度车辆模型的横摆角速度γ来衡量车辆稳定性的程度,并作为控制目标是可行的[8].
由式(11)可得,
(12)
(13)
式中,l为轴距(l=a+b),K为车辆稳定性因素.
轮胎处于极限附着时,车辆侧向加速度ay满足,
|ay|≤μg
(14)
在小质心侧偏角时近似有,
ay≈γVx
(15)
因此,车辆实际横摆角速度受到如下限制,
(16)
式中,μ为路面附着系数,g为重力加速度.
由式(12)、(16)可得出横摆角速度控制目标,

(17)
2 底盘稳定性协调控制策略
基于AFS/DYC的底盘稳定性控制器总体结构如图2所示.

图2 控制器总体结构示意图
该控制系统分由状态识别层、协调控制层和执行层组成.状态识别层根据当前车辆状态参数分析驾驶员驾驶意图,并计算维持期望行驶状态所需附加横摆力矩Mz,同时,判断车辆是处于线性还是已进入非线性区;协调控制层根据车辆实际状态决策各子系统的工作状态,并将期望的直接横摆力矩Mz按照所设计的权重规律进行分配;执行层由液压制动执行机构和前轮主动转向执行机构组成,其中,液压制动执行机构根据分配的直接横摆力矩计算所控制车轮的制动力及制动液压缸压力,前轮主动转向执行机构根据所分配的横摆力矩权重执行前轮主动转角命令δf.
2.1 协调控制器
相关研究表明,利用单一的AFS进行横摆稳定性控制在轮胎侧偏角达到一定程度后所起的作用非常有限,在轮胎力进入饱和非线性时, 甚至不能通过前轮主动转向来调节车辆的横向稳定性.利用单一DYC系统进行横摆稳定性控制时,是通过作用在车辆4轮上的纵向力产生的绕质心的直接横摆力矩来控制车辆侧向稳定性.由于无需考虑轮胎力的饱和,与基于AFS的车辆稳定性控制方法相比,该算法的适用范围更广.但是,这种基于单轮纵向力的控制方法对于车辆的纵向动力学性能及驾驶员的操纵感影响较大.因此,DYC系统在车辆稳定性能较差、轮胎出现饱和时更为适用[9].
基于上述原因,为尽可能减少对车速和驾驶操作感受的影响,本研究确定:当车速较低,路面附着良好,轮胎力处于线性区时应优先使用AFS进行稳定性控制;当路面附着较差,车速较高,轮胎力进入非线性区或即将处于饱和时优先使用DYC进行稳定性控制.一般认为,当侧向加速度超过0.3m/s2时,汽车进入明显非线性区,可将此作为轮胎力状态判断的分界值来进行控制器控制力矩权重系数qδ的分配.同时,为保证光滑控制效果,权重系数采用反正切函数形式,令,
(18)
2.2 执行器
2.2.1AFS控制器.
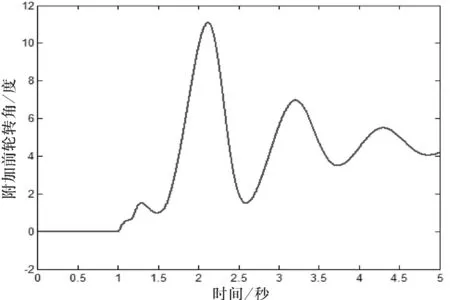
前轮主动转向子系统以横摆角速度偏差作为控制变量,前轮主动转角作为输出变量,采用柔性PID控制方法,根据偏差大小实时调整控制参数,使其相比传统PID控制有更好的准确性和稳定性[10].柔性PID控制参数规则如表1所示,其中,Kp0、Ki0、Kd0为初始控制参数,ka、kb、kc、km为变化参数,范围为(0,1),且km 表1 柔性PID控制参数规则表 2.2.2DYC控制器. 直接横摆力矩控制器采用双输入模糊控制方法,以横摆角速度偏差及横摆角速度偏差变化率作为控制器输入,附加横摆力矩作为输出,论域为[-1,1].控制规则map图如图3所示. 图3 DYC模糊控制map图 附加横摆力矩通过施加到作用车轮的制动力来实现.最优制动车轮的相关研究结果表明,转向过多时选择外前轮和转向不足时选择内后轮作为制动车轮能获得最大的横摆力矩.基于降低车轮负荷的考虑,在差动制动时,除了对外前轮和内后轮进行制动外,同时按比例系数KT对同侧另一车轮施加制动力,0 表2 制动车轮选择规则 在仿真分析时,选择转向盘阶跃输入作为仿真工况,前轮转角5 °,并分别在60km/h与120km/h2种车速情况下进行仿真分析.整车主要参数如表3所示,仿真结果如图4~10所示. 表3 整车主要参数 图4 方向盘转角时间曲线 图5 车速60 km/h时横摆角速度 图6 车速60 km/h时附加前轮主动转角 图7 车速60 km/h时制动缸压力 图8 车速120 km/h时横摆角速度 图9 车速120 km/h时附加前轮主动转角 图10 车速60 km/h时制动缸压力 由图4可以看出,当车速较低时,车辆处于线性区或弱非线性区,AFS与AFS/DYC控制均能产生较好的控制效果,因AFS控制在纵向动力学方面更优应当优先使用.当车速达到120 km/h时,由于地面所能提供轮胎力极限值大幅下降,在此仿真工况下,当转向盘转角处于峰值附近时车辆已进入强非线性区.由图8可以看出,依靠AFS对车辆进行稳定性控制时,仅在轮胎力处于线性区时有较好的效果,而在轮胎力进入非线性区时AFS提供的主动前轮转角已经无法产生更多的附加横摆力矩,控制效果变差.而采用DYC控制和AFS/DYC协调控制时,二者控制效果较好,几乎一致,说明在车辆处于强非线性区时,DYC控制由于对轮胎力饱和不敏感,因此具有更好的控制效果. 本研究基于车辆状态分析设计了AFS/DYC底盘稳定性集成控制系统,并引入横摆力矩分配系数对不同状态下车辆各子系统的介入程度进行分配.仿真实验结果表明,车辆底盘稳定性集成控制系统在车辆小转角、低车速、高附着等轮胎力处于线性区情况下,采用AFS为主导的控制策略能有效对车辆底盘稳定性进行控制,且不影响车速及驾驶感受;在车辆大转角、高车速、低附着等情况下,采用DYC为主导的控制策略,对于轮胎力处于非线性区有较好的控制效果.同时,各子系统的运行状态和提供的附加横摆力矩还能做到实时计算,且随行驶工况在线调整,在大多数车辆行驶工况下,可实现底盘稳定性和行车操纵感受兼顾的效果. [1]喻凡,李道飞.车辆动力学集成控制综述[J].农业机械学报,2008,52(6):1-7. [2]高晓杰,余卓平,张立军.基于车辆状态识别的AFS与ESP协调控制研究[J].汽车工程,2007,29(4):283-291. [3]宗长富,陈国迎,梁赫奇,等.基于模型预测控制的汽车底盘协调控制策略[J].农业机械学报,2011,55(2):1-7. [4]kiencke U,Nielsen L.汽车控制系统:发动机、传动系和整车控制[M].李道飞,俞小莉,译.北京:高等教育出版社,2010. [5]Dugoff H,Fancher P S,Segel L.Ananalysisoftiretractionpropertiesandtheirinfluenceonvehicledynamicperformance[J].SAE Trans,1970,79:341-366. [6]周磊,张向文.基于Dugoff轮胎模型的爆胎车辆运动学仿真[J].计算机仿真,2012,29(6):308-311+385. [7]余志生.汽车理论[M].机械工业出版社,2009. [8]宋宇,陈无畏,陈黎卿.基于ADAMS与MATLAB的车辆稳定性控制联合仿真研究[J].机械工程学报,2011,59(16):86-92. [9]刘力,罗禹贡,江青云,等.基于广义预测理论的AFS/DYC底盘一体化控制[J].汽车工程,2011,33(1):52-55+46. [10]陶永华.新型PID控制及其应用·第2版[M].北京:机械工业出版社,2005. Chassis Stability Integrated Control Based on State Recognition KANGXiaopeng1,2,DONGDawei2,LILei3 (1.School of Mechanical Engineering ,Chengdu University, Chengdu 610106, China; 2.School of Mechanical Engineering,Southwest Jiaotong University, Chengdu 610031, China; 3.School of Transportation and Automotive Engineering, Xihua University, Chengdu 610039, China) A vehicle model of seven degree of freedom and a linear reference model of two degree of freedom are established.Lateral acceleration is used to identify whether the vehicle enters nonlinear region.Then,the paper designs a chassis stability coordination control system based on active front steering and direct yaw-moment control.By introducing additional yaw moment distribution coefficient,the working state of each subsystem is decided and the real-time distribution of the degree of intervention of the coefficients is realized.The simulation analysis is carried out in two cases at speed of 60 km/h and 120 km/h respectively with steering wheel step input.The results show that the control system has good control effects at these two different speeds. state recognition;integrated control;AFS;DYC;yaw moment distribution 1004-5422(2017)01-0089-05 2016-12-20. 四川省教育厅自然科学基金(16ZB0166)、 成都大学校青年基金(2015XJZ17)资助项目. 康小鹏(1983 — ), 男, 博士, 讲师, 从事车辆电子技术与控制系统研究. U463.1 A


3 仿真分析







4 结 语
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20模具制造(2019年10期)2020-01-06小学生学习指导·爆笑校园(2019年6期)2019-09-10解放军健康(2017年5期)2017-08-01中学生数理化·高一版(2017年3期)2017-07-08火控雷达技术(2016年1期)2016-02-06红蜻蜓·低年级(2015年11期)2016-02-02探测与控制学报(2015年4期)2015-12-15中国铁道科学(2015年4期)2015-06-21中国自行车·骑行风尚(2014年4期)2014-10-10
