
基于GA—Otsu的图像分割方法在车道线检测中的应用
2017-04-15 21:07张利倪洪飞樊景帅张勇刘柳
数字技术与应用 2016年12期
张利++倪洪飞++樊景帅++张勇++刘柳

摘要:为了克服传统的Otsu算法在图像分割问题中运算量大与运算效率不高的局限性,本文提出一种基于GA-Otsu的道路图像分割算法。该算法在传统的Otsu算法理论的基础上,采用GA算法优化Otsu算法,利用GA算法的非线性随机搜索能力,求出类间方差最大时的图像分割阈值。最后通过具体的实例验证,结果表明该算法能有效地对道路图像进行分割,且相比于传统的Otsu算法,运行时间大大减少,具有更加广泛的工程适用面。
关键词:视觉导航 道路图像分割 Otsu算法 GA算法 最优阈值
中图分类号:U491.6+2 文献标识码:A 文章编号:1007-9416(2016)12-0056-02
基于视觉的道路检测技术是无人驾驶系统和机器人视觉导航中的关键技术,也是当今车辆辅助驾驶系统的重要组成部分。近些年来,国内外学者已从多个角度对基于视觉的道路检测技术进行广泛的研究。研究表明,由于实际道路环境的具有不可预测的复杂性以及图像表示的模糊性,道路检测必须先借助图像分割技术将道路目标从图像背景中分离出来,而后用基于特征或模型的图像处理算法予以识别。目前,基于图像分割的道路检测技术已成为了研究热点,比较常用的方法主要有基于阈值的Otsu算法,区域生长法,以及K-means算法等[1][2][3]。而其中又以基于阈值Otsu算法鲁棒性较高,应用面最广,但是Otsu算法存在着计算量较大,运算效率不高的缺点。本文针对于目前常用的Otsu算法的缺点,提出一种基于GA-Otsu的道路图像分割算法,该方法引入GA算法对Otsu算法进行优化,大大减少了Otsu算法的计算量,提高了算法的运算效率。
1 算法的基本介绍
1.1 Otsu算法的基本介绍
Otsu算法(大津法)是由日本学者大津展之推导出来的。其基本思路是将图像的直方图以某一灰度为阈值,将图像分成两组并计算两组的方差,当被分成的两组之间的方差最大时,则以此灰度值为阈值,对图像进行分割[4]。
具体过程如下:
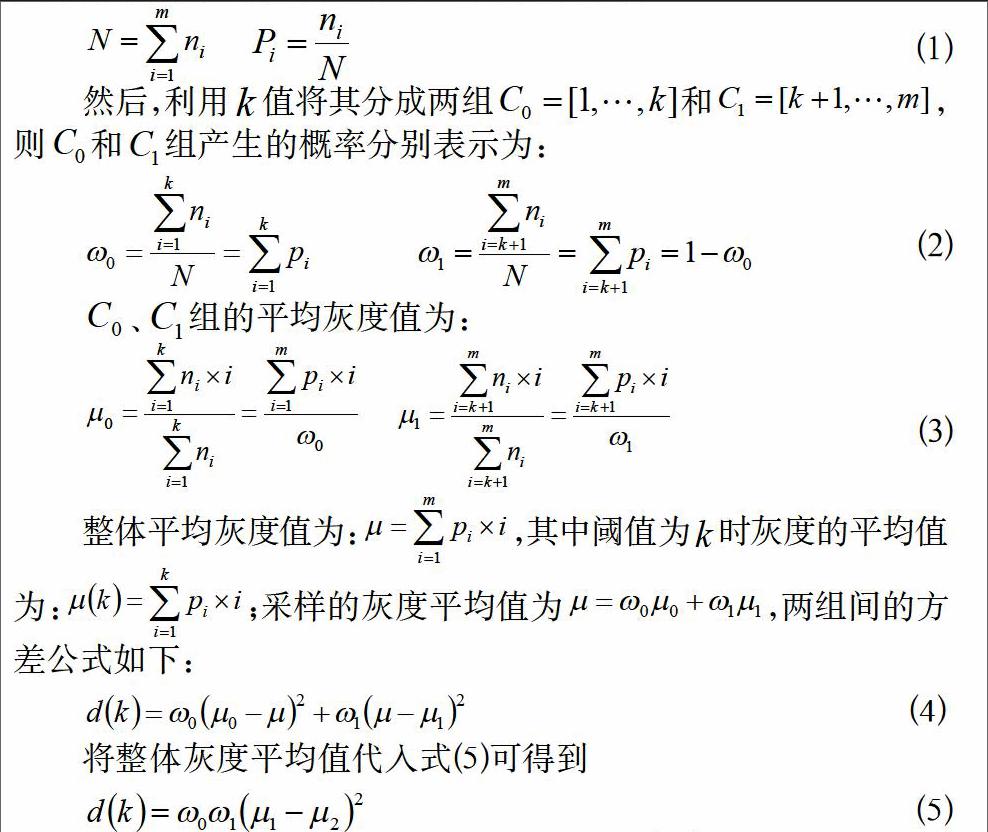
设一幅图像的灰度值为个,灰度值为的像素数为,则总的像素个数为:计算得到各灰度值的概率为:
在1~范围内改变值,求,使得,然后以为阈值分割图像,即可得到最佳的分割效果。
1.2 遗传算法概述
遗传算法(GeneticAlgorithms,GA)是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化的搜索算法[5],目前在机械设计、计算机科学、生物工程、自动控制、人工智能和社会科学等领域都有广泛应用[6][7]。遗传算法的基本流程可以概括为:从任一初始群体出发,通过随机选择、交叉和变异操作,产生一群更适应环境个体,使群体进化到搜索空间中越来越好的区域,通过一代一代地不断繁衍进化,最后收敛到一群最适合环境的个体,即问题的最优解。
2 基于GA-Otsu的道路图像分割算法的设计
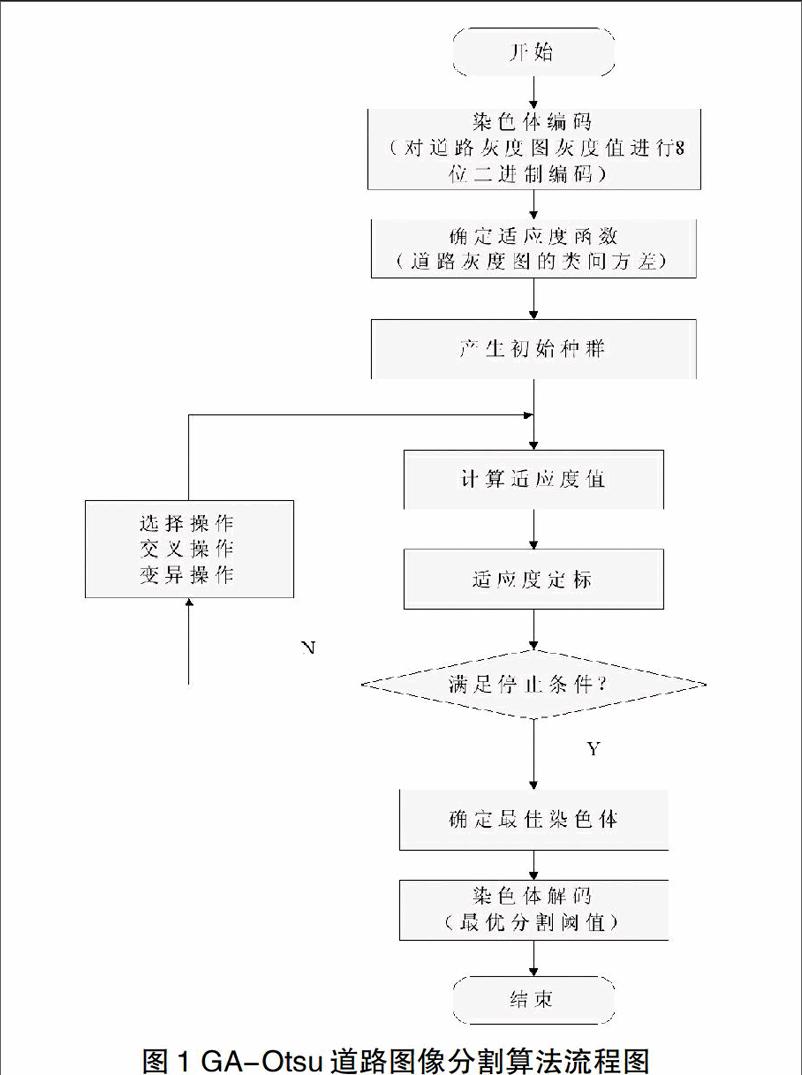
由1.1节可知,Otsu算法必须对所有的灰度值进行类间方差计算,比较出最大的类间方差,才能有效的将图像进行分割,所以Otsu算法计算量非常大,运行效率不高。而GA算法能非线性快速查找最优解及最大类间方差。GA优化Otsu算法的步骤如下:
(1)首先对实现解空间的数值编码。将所采集到的道路图像转化为灰度图,由于灰度图由0~255区域的灰度值组成,正好对应着一个8位二进制,所以使用一个8位二进制数作为一个染色体。
(2)初始化种群。初始化种群也就是解的起始值,如果初始化种群选取过偏,则将造成最优解收敛慢、计算时间长的缺点。因此,初始化种群也可凭道路图像的灰度图进行预估,确定一组染色体;
(3)确定与计算适应度函数值。由Otsu算法原理可知,该方法为分割阈值方法,则可设定每个灰度值的最大类间方差作为染色体的评价函数。由式(5)则可知每一个染色体的适应值,对于所得出的适应值,求出每一个染色体的选择概率及累计概率,并产生多个随机数。选择出随机概率对应的染色体作为遗传运算的一组种子,其中适应值大的被选取的可能性大,而适应值小的被选取的机会少。被选中的染色体作为遗传种子,进行遗传运算,这样一代一代地进行,每一代所得到的适应值都不相同,新一代中的染色体得到的适应值较高,因此,其解也更逼近于最大的值。
(4)遗传运算。首先进行杂交运算,杂交运算就是对染色体中的某些基因进行交换,此过程中为了控制交换的位数,必须给定一个杂交率。杂交率越大,其交换的基因越多,其值变化就越快,解的收敛速度就越快;但杂交率太大,不利于求得最优解。
基于GA-Otsu的道路图像分割算法流程如图1所示。
3 应用实例
3.1 仿真过程与结果
本文应用实例中样本数据为实路采集的两幅道路图像,如图2所示。
GA算法的运行参数主要有个体编码串长度(本文为8位),群体大小、交叉概率、变异概率和终止代数等,这些参数对遗传算法的运行效率和计算结果影响较大。根据一般建议的取值范围[8],群体规模为40,交叉概率为0.4,变异概率为0.005。经过 GA 算法 150次迭代计算后,图3(a)为样本(a)最佳适应度变化曲线与每一代最佳值进化曲线。
通过GA-Otsu算法得到最终的道路分割效果(原始图像的下半部分)如图4所示,得到的分割阈值分别为82和101,由此可知,GA-Otsu算法能准确有效地将道路与背景分割出来。
3.2 算法对比
将GA-Otsu算法与传统的Otsu算法分別在MATLAB平台上对样本图像进行图像分割,统计算法运行时间如表1所示。由表1可知,GA-Otsu算法在保障了图像分割效果的基础上,比传统的Otsu算法运行时间少了一半以上,大大提高了算法的运算速度。则说明GA-Otsu算法比传统的Otsu算法能够更加快速准确地适应于实际道路分割问题之中。
4 结语
对于道路图像分割问题,本文在目前有关研究的基础上,将传统的图像分割技术与现代智能理论相结合,采用GA算法优化传统的Otsu算法,设计了一种基于GA-Otsu的道路图像分割算法。通过具体应用实例可知,该算法能够克服目前常用的Otsu算法运算量大,运行效率不高的缺点,能快速有效地将图像中的道路目标与背影进行分割,实际工程适用面更加广泛。
参考文献
[1]陶丽媛.基于动态图像的道路检测技术的研究[D].哈尔滨:哈尔滨理工大学,2010.
[2]金立生,王荣本,高龙,郭烈.基于区域生长的智能车辆阴影路径图像分割方法[J].吉林大学学报(工学版),2006,(36):132~135.
[3]王敏杰.基于视觉的道路检测技术研究[D].北京:北京交通大学,2012.
[4]郝文化,田蕾,董秀芳.MATLAB 图形图像处理应用教程[M].北京:中国水利水电出版社,2004.
[5]Goldberg D.E. Genetic Algorithms in Search and Optimization and Machine Learning[M]. Addison Wesley Publishing Company, 2010.
[6]祝诗平,王一鸣,张小超,等.基于遗传算法的近红外光谱谱区选择方法[J].农来机械学报,2004,35(5):152~156.
[7]孙志田,张建梅,闫常丽.基于遗传算法公交线路网优化模型仿真研究[J].计算机仿真,2011,28(11):335~338.
[8]雷英杰,张善文,李续武.MATLAB遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2005.
