基于虚拟仪器技术的快堆组件形位测量控制系统研究
2017-04-18 07:47刘云焰申凤阳吴纯良高继宁谷春星李国才
核科学与工程 2017年1期
刘云焰,孙 玉,申凤阳 ,吴纯良,李 兴,高继宁,谷春星,李国才
(1.中国原子能科学研究院,北京102413;2.国核华清(北京)核电技术研发中心有限公司,北京102209)
基于虚拟仪器技术的快堆组件形位测量控制系统研究
刘云焰1,2,孙 玉1,申凤阳1,吴纯良1,李 兴1,高继宁1,谷春星1,李国才1
(1.中国原子能科学研究院,北京102413;2.国核华清(北京)核电技术研发中心有限公司,北京102209)
利用虚拟仪器技术,设计了一套快堆组件形位测量控制系统,用于中国实验快堆屏蔽层组件和反射层组件热冲击试验课题中组件形状尺寸测量。采用NI公司的数据采集卡实现了系统的硬件,采用Labview平台编制了系统的软件。该系统具有控制功能、测量功能和数据处理功能,实现快堆组件的偏心值、扭曲度和弯曲度等形状尺寸的测量功能。试验表明,该系统运行稳定、测量准确、功能齐全、安全测控,达到设计目的。
中国实验快堆;形位仪;测控系统;计算模型;组件
I-1008型组件形位测量仪(简称形位仪)是中国实验快堆(简称CEFR)从意大利引进的一台大型专用于快堆组件形状尺寸测量的精密设备。在CEFR屏蔽层组件和反射层组件冲击试验课题研究中,组件热冲击试验前后必须利用该设备测量组件的形状尺寸。然而该设备控制系统老旧、无备品备件,不便于维保,其测量系统已经损坏。因此研制了一套配套的快堆组件形位测控系统以恢复其原有功能。
虚拟仪器技术是出现于20世纪90年代初期的一种新型仪器技术。它将许多以前由仪器硬件完成的信号分析或者程序控制工作,交由计算机软件进行处理,实现了仪器的硬件功能的软件化[1-2]。本文研制了一套基于虚拟技术的快堆组件形位测控系统,用于在CEFR屏蔽层组件和反射层组件冲击试验课题中组件热冲击试验前后测量组件的形状尺寸。
1 形位测控系统的改造
1.1 组件形位测量仪介绍
I-1008型组件形位测量仪具有精确测量快堆组件的偏心值、扭曲度和弯曲度等形状尺寸的功能。其主要技术指标如下:
最大测量长度:4000mm;
同轴分度头误差:0.005mm;
同轴滑动头误差:0.005mm;
直线行程:±0.02mm/4000mm;
测量滑块最大速度:46mm/s,
测量时:5~10mm/s;
滑动头最大速度:46mm/s;
位移探头测量时:10~20mm/s。
1.2 形位测控系统的要求
该系统的总体构成:计算机1台、数据采集卡及配套端子板1套、控制柜1个、配套软件1套。
该系统能完成原有测控系统的全部功能。包括:控制功能、测量功能和数据处理功能。
控制功能有:滑动头的上升、下降和停止控制;测量滑块的上升、下降和停止控制;位移探头靠近待测面和远离待测面运动控制;装卸臂夹块的松开和夹紧控制;装卸臂上升和下降控制;各种控制联锁。
测量功能有:各限位开关状态测量、4个位移探头测量、测量滑块高度测量。
数据处理功能有:能根据测量出的各高度段上4个位移探头测量到的原始数据,可计算出各高度上的组件各面尺寸变化值、面对边距离、面扭曲度、面偏心值、组件扭曲度、组件弯曲度、组件偏心值,并作出相应的图表,根据组件偏心值做出组件偏心投影图。
1.3 形位测控系统的硬件系统
工控机采用研华610H。
数据采集卡NI-PCI6221(68针)主要参数:16路16位AI,信号最大输入范围±10V;2路16位AO,输出范围±10V;2路32位COUTER。其配套端子板型号为TBX-68。
数据采集卡NI-PCI6515主要参数:32路DI,最大输入范围±30V;32路DO,每路输出电流125mA。其配套端子板型号为SCB-100。
位移探头主要参数:型号WYD-10,工作电压24VDC,测量范围10mm,测量精度0.05%,输出信号:0~5V。
1.4 形位测控系统的计算模型
为了能计算出各面尺寸变化值、面对边距离、面扭曲度、面偏心值、组件扭曲度、组件弯曲度、组件偏心值,建立了各种参数的计算模型。
I-1008形位仪待测组件及位移探头结构模型示意图如图1所示。
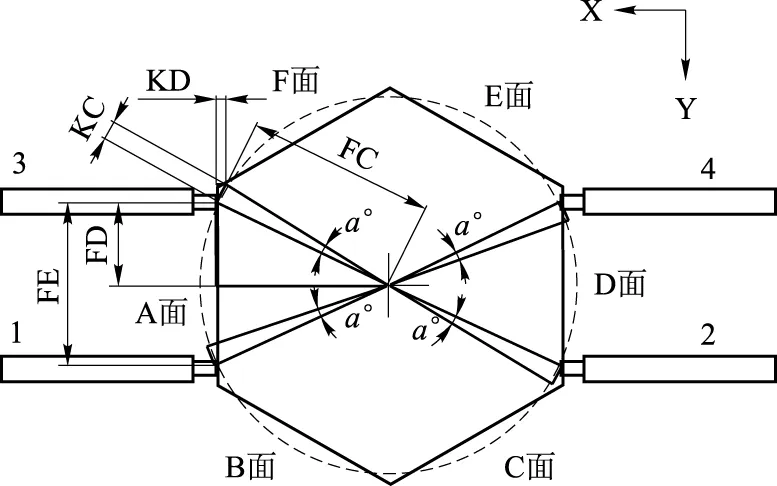
图1 组件及位移探头结构模型示意图Fig.1 Schematic of assembly and displacement sensors structure model
1.4.1 组件外形参数计算
(1) 面尺寸变化值计算
各对面尺寸变化值公式为:
VRAD=(P1AD+P2AD
+P3AD+P3AD)/2-FF
(1)
式中:VRAD——组件AD面的尺寸变化值,mm;
P1AD-P4AD——1号~4号位移探头测量值;
FF——CEFR组件理论面对边距,取59mm。
公式(1)为组件AD面的尺寸变化值,BE面、CF面同理可得,下同。
(2) 面对边距计算
各对面对边距公式为:
DMAD=VRAD+FF
(2)
式中:DMAD——AD面的面对边距,mm。
(3) 面扭曲度计算
各面扭曲公式为:
TWA=arctan[(P1AD-P3AD)/FE]
(3)
(4)
式中:TWA——A面的扭曲度,°;
TWD——D面的扭曲度,°;
FE——1号位移探头距3号位移探头理论距离或者2号位移探头距4号位移探头理论距离,mm;
(4) 面扭曲度计算
各对面偏心值公式为:
FCAD=(P1AD-P2AD+P3AD-P4AD)/4
(5)
式中:FCAD——AD面的偏心值,mm。
(5) 组件偏心值计算
组件偏心值公式:
EXAD=FCAD
(6)
EYAD=0.577(FCBE+FCCF)
(7)
(8)
式中:EXAD、EYAD、EAD——组件在X方向、Y方向、总的偏心值,mm。
(6) 组件弯曲度计算
组件弯曲度公式:
BD=arctan(ΔEAD/ΔH)
(9)
式中:BD——组件的弯曲度,°;
ΔEAD——相对下端面组件偏心值,mm;
ΔH——相对下端面高度值,mm。
(7) 组件扭曲度计算
组件扭曲度和相对扭曲度公式如下:
(10)
式中:TW——组件的扭曲度,°;
1.5 形位测控系统的软件系统
本软件是由Labview编写的。Labview为图形化编程语言,使用简单,可以快速的开发测控系统[3-4]。本软件结构图如图2所示。
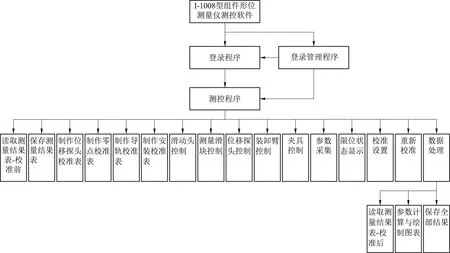
图2 形位仪软件结构图Fig.2 Diagram of software structure of shape and size measuring instrument
本软件首先调用登陆界面,操作员输入登陆名称和密码才能运行测控程序,进入测控界面。另外通过登陆界面,管理员可以进入登录管理界面进行登陆管理。登陆之后可进入测控软件界面。
测控软件主要由四部分组成:测量校准,运动部件的控制及状态测量,位移探头测量数据采集、处理和显示,数采存储和读取。
其中测量校准包括位移探头测量结果校准、导轨校准、零点高度校准和安装校准。通常情况下不必使用该功能,当要求获得更高测量精度时可以利用该功能。
运动部件的控制及状态测量主要包括滑动头控制、测量滑块控制和高度测量、位移探头控制、装卸臂控制、夹具控制及限位开关状态测量与控制。软件中为每一个运动部件提供了单一的控制界面,并且这些界面中设计了运动部件外形简图和运动动画。通过这些界面,操作员可以方便操作运动部件及观察其状态。
位移探头测量数据采集、处理和显示是本软件的重点和难点部分。为方便使用,软件会将每次位移探头测量时的测量滑块高度、测量面、四个位移探头的测量值按照顺序记录在一个测量结果列表中,而且软件设置了按照测量滑块高度、测量面自动排列测量结果顺序的功能。在完成全部高度测量之后,将获得一个完成的测量结果列表。点击数据处理按钮,软件会自动按照各计算模型计算出组件各面尺寸变化值、面对边距离、面扭曲度、面偏心值、组件扭曲度、组件弯曲度、组件偏心值等值,并以图形的形式显示出来。
数据存储和读取功能:保存位移探头测量结果表和各外形尺寸计算结果图、表;读取位移探头测量结果表,以便于重新进行数据处理。
2 形位测控系统测试
该测控系统的测试工作主要包括控制功能测试、限位开关状态测量和报警功能测试和定量技术指标的检测等。测试结果见表1所示。
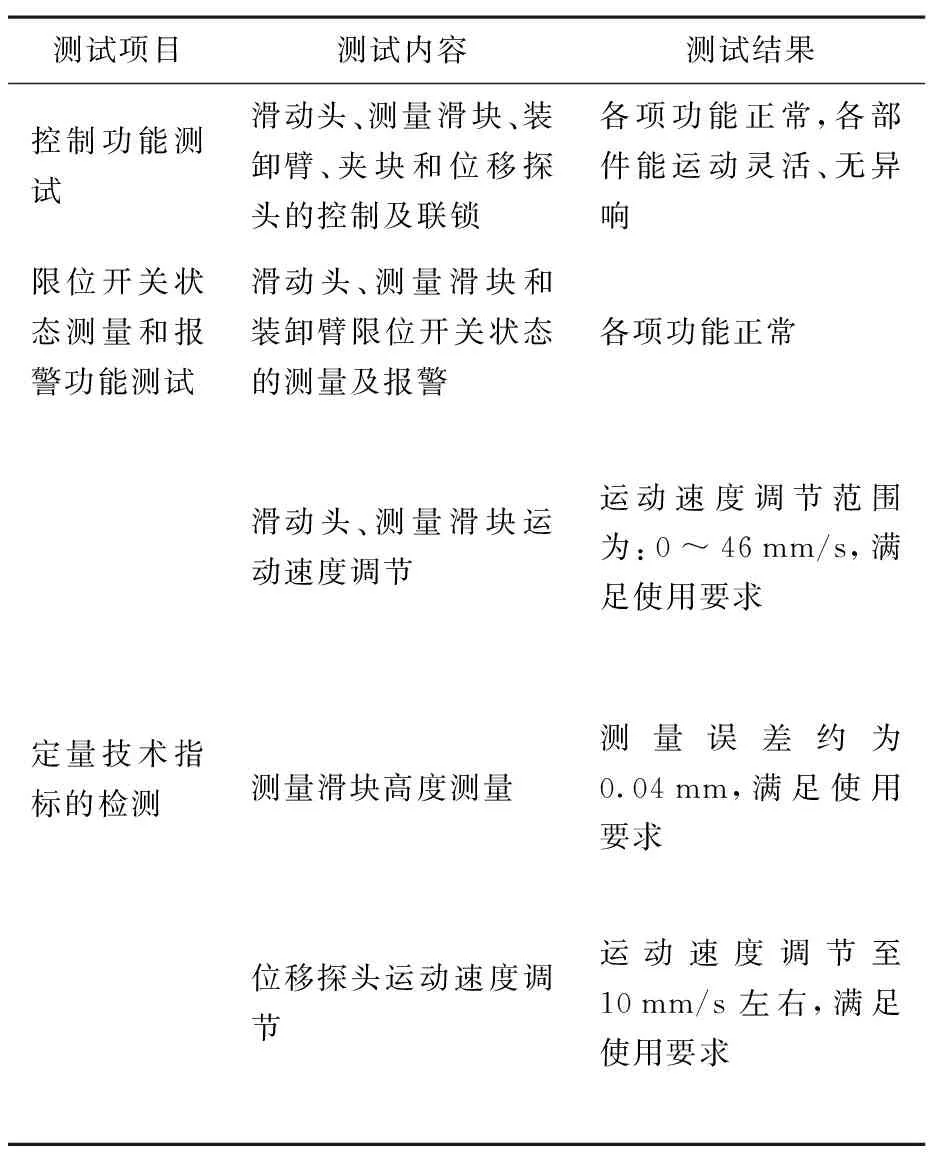
表1 测控系统测试结果表Table 1 Test results of measurement and control system
3 组件测量实验
本实验的目的:通过完整的组件测量实验来完善组件测量方法及流程,进一步验证形位仪组件座和上固定件的固定效果、计算机测控系统功能;获得待测的模拟标准组件、反射层组件和屏蔽层组件形状尺寸数据,积累组件形状尺寸测量实验数据;完成数据处理软件的测试;通过测量所得组件数据,可对形位仪的组件测量结果进行评价、估计测量误差。
3.1 组件测量系统误差分析实验
根据本测量系统的构成,可以分析出位移探头测量误差主要来源有:位移探头、探头架运动、组件旋转和测量滑块运动。其中位移探头的主要误差来源为位移探头自身、数据采集卡和探头架的细微抖动。为了获得位移探头、探头架运动、组件旋转和测量滑块运动产生的最大误差,分别进行了位移探头测量稳定性实验、同高度同测量面位移探头重复测量实验、同高度组件旋转之后位移探头重复测量实验、不同高度同测量面位移探头重复测量实验。误差分析实验结果见表2。
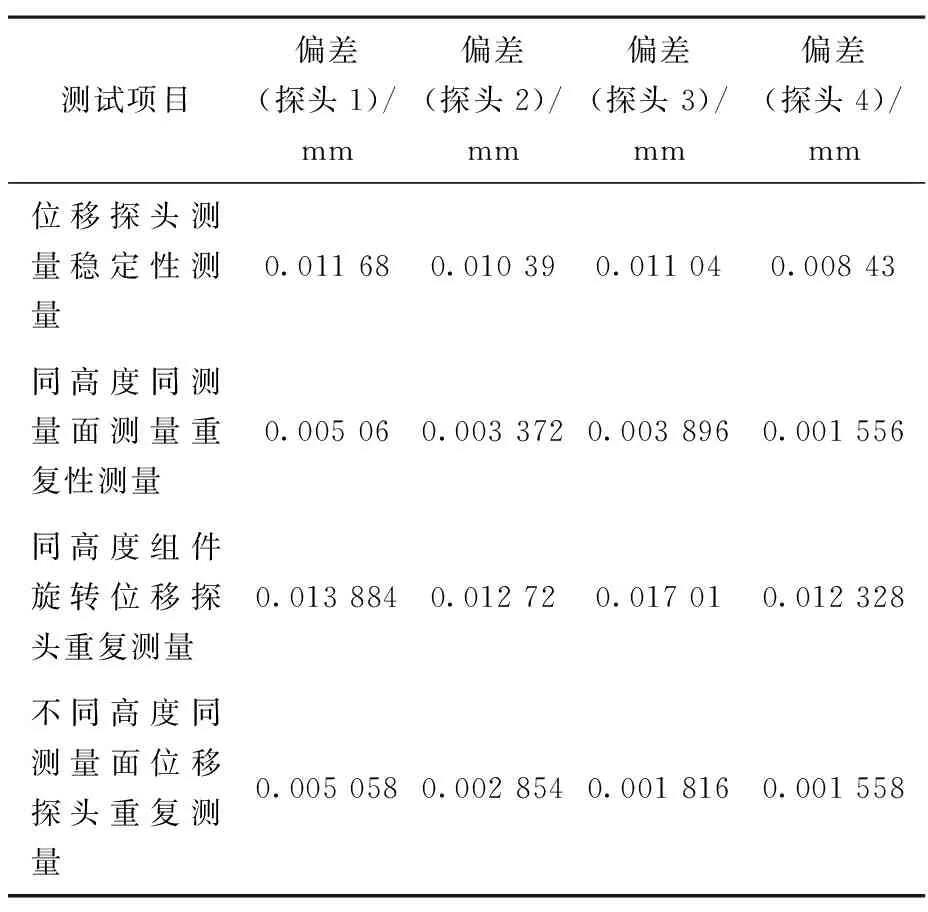
表2 误差分析实验计算结果表Table 2 Results of error analysis experiment
实验结果表明,位移探头产生的最大误差为0.01mm、探头架运动产生的最大误差为0.005mm、组件旋转产生的最大误差为0.0035mm、测量滑块运动产生的最大误差可以忽略。根据误差合成方法,位移探头总误差等于以上四个误差的方和根,为0.012mm。
位移探头产生的误差 、探头架运动产生的可通过增加测量和采集次数求平均值的方法来减小。组件旋转产生的误差不能通过上述办法减小。需要对组件座进行修改,增加组件固定结构。根据组件参数计算模型分析可知,组件旋转产生的误差虽然影响4个位移探头具体的测量值,但只会影响面扭曲度和组件扭曲度的值,对其他参数如面尺寸变化值、面对边距、面偏心值、组件偏心值和组件弯曲度等没有影响。根据计算模型估计,组件旋转120°产生的面扭曲度为0.019°。若从测量组件AD面开始,旋转60°测量组件BE面,再旋转60°测量组件CF面。则完成组件全部三个对面测量后由于旋转产生的组件扭曲度偏差估计为:0.057°。
3.2 组件测量及数据分析
3.2.1 组件测量及数据分析
完成了组件测量系统误差分析实验后,进行了组件测量实验,包括模拟标准组件测量实验、屏蔽层组件测量实验和反射层组件测量实验。模拟标准组件面对边距比较表见表3,模拟标准组件面对边距的实验结果与出厂检验结果最大偏差为0.016mm,远低于快堆组件允许的最大偏差0.1mm要求,证明该系统能够满足快堆组件的面对边距测量精度要求。
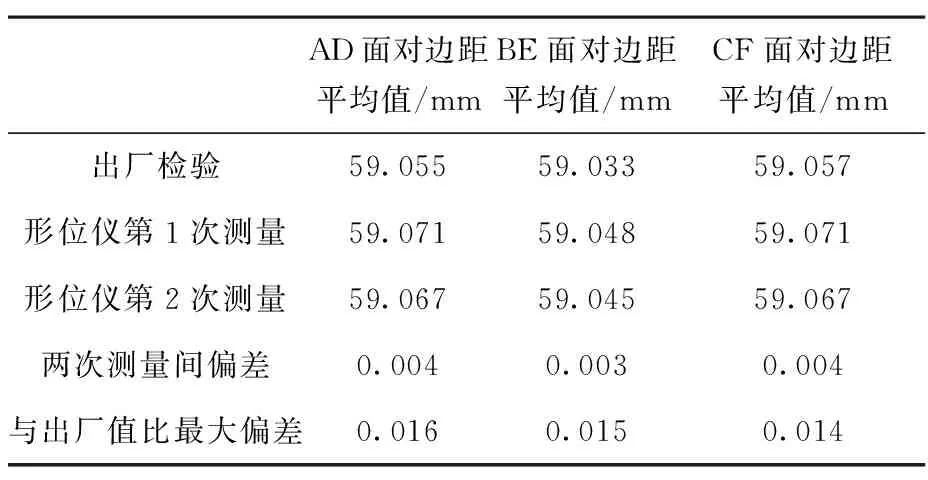
表3 模拟标准组件面对边距比较表Table 3 Comparision of face edge distance measurement of simulate standard assembly
测量得到的各组件的主要参数比较表见表4。根据表4可以看出,模拟标准组件各项参数均明显优于屏蔽层组件和反射层组件的,模拟组件具有最高的精度。屏蔽层组件和反射层组件的主要参数基本相同,具有相同的精度。因此,可以进一步认为形位仪测量结果是正确的,该形位仪具备了快堆组件形状尺寸测量功能[5-6]。
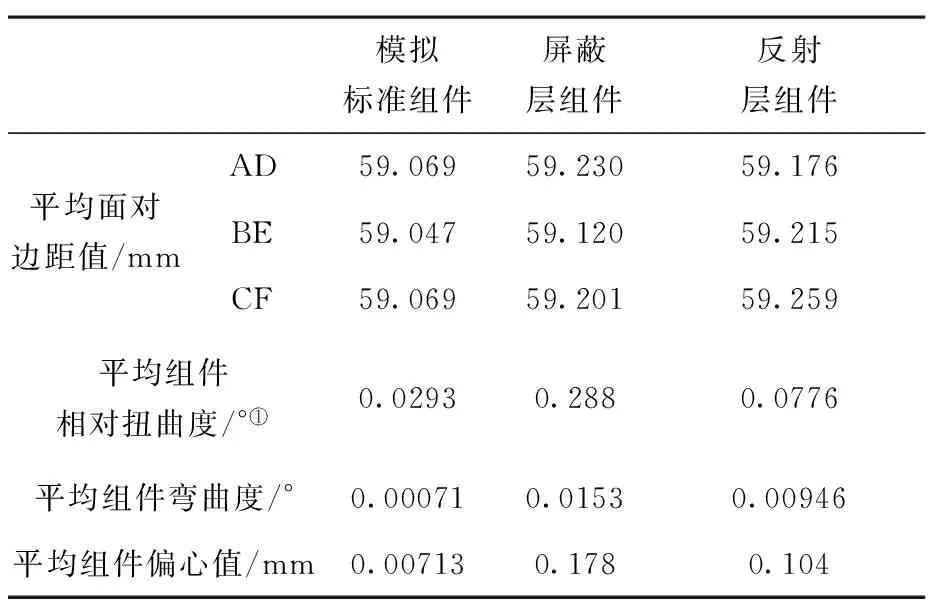
表4 组件的主要参数测量表Table 4 Results of main parameters measurement of different assemblies
4 结论
本测控系统采用虚拟仪器技术,实现了精确测量快堆组件的偏心值、扭曲度和弯曲度等形状尺寸的功能。本系统具有运行稳定、测量准确、功能齐全、安全测控等特点。能够完成形位仪各运动部件的控制及相应的运动联锁;各运动部件能灵活运动、无异响;各限位开关能正常动作,其状态信息能够采集进入计算机,同时发出相应报警;测量滑块高度测量准确。并且获得了待测的模拟标准组件、反射层组件和屏蔽层组件形状尺寸数据,积累了组件形状尺寸测量实验数据。
致谢
感谢中国实验快堆屏蔽层组件和反射层组件冲击实验形位测量系统课题组成员的通力合作,感谢钱顺发老师、张振灿老师、高永光老师等专家在工作中给予的技术指导和帮助。感谢运研部部门领导和同事们的支持和帮助。感谢结构室等兄弟部门的合作与支持。
[1] 邓志新,王玲彬.秦山第二核电厂燃料组件辐照变形测量、分析及对策研究[J].核电技术,2013:307-311.
[2] 刘敬露,韩震宇.核燃料组件变形测量系统的研制[J].计量与测试技术,2005:10-13.
[3] 杨乐平,李海涛,赵勇,杨磊,安雪滢.LabVIEW高级程序设计[M].北京:清华大学出版社,2004.
[4] 张毅刚,乔立岩,等.虚拟仪器软件开发环境LabWin- dows/CVI6.0编程指南[M].北京:机械工业出版社,2002.
[5] 盛骤,谢式千,潘承毅.概率论与数理统计[M].北京:高等教育出版社,1989.
[6] 费业泰.误差理论与数据处理[M].北京:机械工业出版社,2010:57-79.
Research of Shape Measurement and Control System for Fast Reactor Assembly Based on Virtual Instrument Technology
LIU Yun-yan1,2,SUN Yu1,SHEN Feng-yang1,WU Chun-liang1,LI Xing1,GAO Ji-ning1,GU Chun-xing1,LI Guo-cai1
(1.China Institute of Automatic Energy,Beijing 102413,China;2.State Nuclear Power Technology Research & Development Centre,Beijing 102209,China)
Using virtual instrument technology,a shape dimension measurement and control system is designed for the assembly shape and size measurementsin the experimental thermal shock tests of the shielding layer assembly and the reflective layer assembly of Chinese Experimental Fast Reactor.The hardware of the system is realized using NI’s data acquisition cards,on which the software is developed using the Labview platform.The system with control,measurement,and data processing functions,can accomplish the shape and size measurements,i.e.the eccentricity,twist,and bend degree of assembly of fast reactor.Experiments show that the system achieves the design goals of stability,accurate measurement full function,and sefety in operation.
China Experimental Fast Reactor;Shape and size measurement instrument;Measurement and control system;Calculation model;Assembly
2016-12-28
刘云焰(1977—),男,江西人,高级工程师,现从事反应堆工程与核测控方向的科研工作
TL375
A
0258-0918(2017)01-0017-06
猜你喜欢
国际中文教育(中英文)(2022年4期)2022-02-09
中国船检(2020年11期)2020-11-27
制造技术与机床(2018年11期)2018-11-23
快乐语文(2018年7期)2018-05-25
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
重型机械(2016年1期)2016-03-01
小说月刊(2015年9期)2015-04-23
人生十六七(2015年5期)2015-02-28