驾驶员反应能力及其人—车—环境仿真检测平台的搭建
2017-04-27 14:22弓馨梁龙凯
电子技术与软件工程 2016年15期
弓馨++梁龙凯
摘 要 本文通过分析汽车驾驶员临界反应能力对行车安全性的影响,得出良好的驾驶员临界反应能力是决定行车安全性的关键因素;并提出基于人-车-环境的硬件在环仿真试验条件可以测试驾驶员在不同路况下的反应能力,搭建了驾驶员反应能力检测试验平台,可用于驾驶员的考核、训练及后续研究。
【关键词】驾驶员反应能力行车安全 检测平台
现今,我国道路交通事业发展迅猛, 交通事故、城市道路拥堵等现象也随之大幅度增加,这样的交通环境, 将对驾驶员的驾驶技能、身体素质提出更高的要求。影响行车安全的因素众多,驾驶员对交通环境信息的临界反应能力对行车安全的影响不可忽视。
1 驾驶员反应能力
驾驶员的反应能力是指驾驶员在复杂交通环境中,持续接收、分析行人和汽车状态,在一定程度上预见变化,并在瞬间做出准确判断的能力。
驾驶员反应能力主要体现在转向行为能力和制动行为能力上,而紧急情况下驾驶员的转向操作和制动操作将从根本上决定事故程度。反应能力对驾驶员十分重要, 外界客观条件一致时,反应能力直接决定反应时间的多少。实验证明车速30km/h的汽车,反应时间延长0.1s, 就要驶近1m,此距离将成为威胁生命的重要因素。因此,具有良好的临界反应能力是保障行车安全的重要因素。
由以上分析可知,驾驶员反应能力对于行车安全有重要意义。因此建立驾驶员反应能力测试平台十分重要,不仅能检测驾驶员的临界反应能力,而且能分析不同因素对于反应能力的影响,对于从根本上提高行车安全具有重要意义。
2 驾驶员反应能力检测平台
近年交通环境越来越复杂,我们有必要采用人-车-环境全景仿真的试验条件来进行驾驶员临界反应能力的测试,用于筛选和训练驾驶员,以及今后的深入研究。由于商用车事故率较大且造成的人员伤亡、财产损失也更大,因此本文采用TruckSim和LabVIEW软件的联合仿真实现检测平台的搭建。
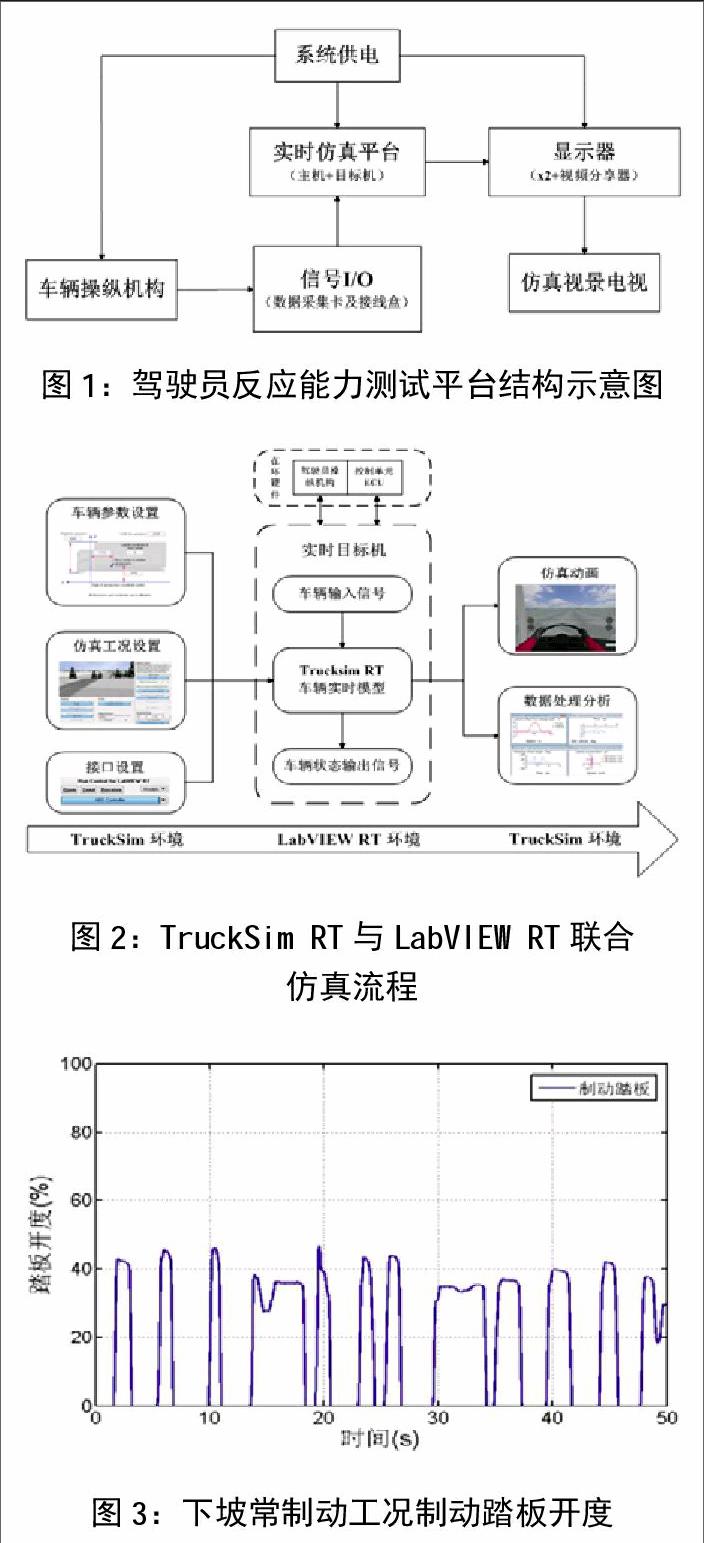
驾驶员反应能力测试平台主要由实时仿真平台、数据采集设备、车辆操纵机构、仿真环境显示设备等组成,如图1。驾驶员的操纵信号由数据采集设备输送给实时仿真平台,实时仿真平台实时计算车辆的运行状态,并将车辆的运行数据输出给显示器,仿真视景电视显示即时驾驶环境。
2.1 检测平台的硬件
车辆操纵机构踏板、转向盘及换挡杆,均由采购的实车零部件组成,可以最大程度的使检测平台具有实车的操纵感。例如检测平台的踏板选用的是自带非接触式霍尔传感器的瑞立电子踏板型号11080100010,可将踏板开度以模拟电压信号传递给实时车辆模型。除了驾驶员操纵机构外,检测平台还应具备驾驶辅助设备,如座椅、显示器等,且各部分的相对位置应尽可能符合驾驶实际。
实时仿真平台由主机和目标机组成,两者间通过TCP/IP协议进行通讯。主机装备TruckSim和LabVIEW软件,可进行车辆模型参数设置、仿真工况设置,以及监视仿真程序的实时运行状态,并能从目标机中导出后续研究和分析的试验数据。目标机进行操纵信号采集,使实时车辆模型获得驾驶操纵信息,并负责运行实时车辆模型。
检测平台的目标机采用型号为PXI-1042Q的NI工控箱,配备PXI-6259数据采集卡、SCB-68接线盒。目标机可通过LabVIEW的NI -DAQ 模块,将采集的信号传递给实时车辆模型。
2.2 检测平台的程序设计
检测平台的实时程序借助于TruckSim RT实现,可运行于LabVIEW RT环境,运行速度比实时快约3-6倍,其联合仿真流程如图2所示。
检测平台实时程序包括主机程序和目标机程序。主机程序在主机运行,能实现主机、目标机程序的运行以及试验数据保存的开关控制。目标机程序是总体程序的核心,采用平铺式顺序结构。两个循环结构构成了程序主体,分别为驾驶员操纵信息的数据采集循环和TruckSim模型运行的定时仿真循环,即实时车辆模型的LabVIEW仿真架构。数据采集和TruckSim实時模型循环终止后实时数据跟踪模块进行数据保存。
总体程序中的数据传输采用的是共享变量的形式。主机与目标机间的数据通信借助网络共享变量实现,目标机两个循环间通过单进程共享变量进行数据传递。
2.3 检测平台的数据输出
利用检测平台可以进行不同工况的人-车-环境硬件在环仿真试验,获得驾驶员在不同试验工况下的转向及制动操纵数据,用于驾驶员反应能力的分析。图3为利用检测平台获得的驾驶员在下坡常制动工况下的制动踏板数据。
参考文献
[1]于增亮.基于仿真环境驾驶员临界反应能力的研究[D].长春:吉林大学,2005.
[2]唐阳山,夏道华.不同驾驶员反应时间对汽车防撞安全距离的影响研究[J].科学技术与工程,2016.
[3]王龙.基于虚拟驾驶环境的驾驶员反应时间采集和测算研究[J].交通工程,2012.
作者简介
弓馨,现为东北师范大学人文学院讲师。研究方向为汽车动态仿真与控制。
作者单位
东北师范大学人文学院 吉林省长春市 130025
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
人大建设(2019年12期)2019-05-21
瞭望东方周刊(2017年42期)2017-12-05
环球时报(2017-03-30)2017-03-30
汽车与安全(2016年5期)2016-12-01
公民与法治(2016年4期)2016-05-17
中国卫生(2015年3期)2015-11-19
中国交通信息化(2014年4期)2014-06-05
军事历史(1985年2期)1985-01-18