
无人机协同作战仿真系统构建与模型校验
2017-05-10 13:30周维强
电子技术与软件工程 2017年8期
周维强

摘 要
为适应快速作战战场环境、提高短时作战效率,充分发挥无人机在战场上的应用价值,构建基于HLA/RTI标准体系结构的无人机协同作战仿真系统。通过仿真模型校验,验证无人机协同作战系统的完备性、合理性、正确性。
【关键词】无人机协同作战 HLA/RTI标准体系 信息保障 模型校验
1 概述
依托数字战场环境,通过构建无人机协同作战仿真系统,规划典型战场环境、作战任务,形成以作战平台为主、传感器、数据链及武器模型为辅的信息交互关系,对基于无人机信息保障的协同对地打击流程进行仿真试验研究,并对仿真系统进行模型校验,能够验证无人机协同作战系统的完备性,便于快速分析无人机信息保障流程的合理性、可行性。
2 无人机协同作战系统结构设计
当前侦察型无人机作战是以“地面控制站”为中心的使用方式,先将侦察情报信息发送给地面控制站,由地面控制站进行分发与处理,再把情报信息发送给打击平台,整个过程环节多、耗时长,获取的情报信息将严重滞后于战场变化,不能直接提供给打击装备,不具备发现即打击的能力,对于稍纵即逝的战场目标将失去交战时机。为了充分发挥无人机的侦察能力,应当使无人机能够及时直接为空中作战平台提供火力信息保障,建立基于无人机信息保障的无人机/有人机协同作战系统,实现对时敏目标的快速精确打击的需求。
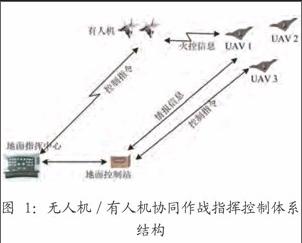
无人机/有人机协同作战系统针对的是典型的时间敏感目标打击,有人机需在有限的时间窗口内完成打击闭环。而针对此类低动态时敏目标,有人机对目标指示信息的时效性、数据频率和精度等要求都有大幅提高,方能实现“发现即打击”,可通过武器协同数据链实现无人机与有人机的直接交联。由无人机实时向有人机提供高精度的目标指示信息,辅助有人机进行火控解算和武器控制,完成对地面低动态时敏目标的精确打击。基于无人机信息保障的无人机/有人机协同作战系统的指挥控制体系结构如图1所示。
通过建立无人机火控信息保障链条,提高目标定位信息进入作战飞机火控系统的时效性,可实现减少全系统反应时间,提高武器作战效能,实现“发现即打击”的目的。
3 仿真系统构建
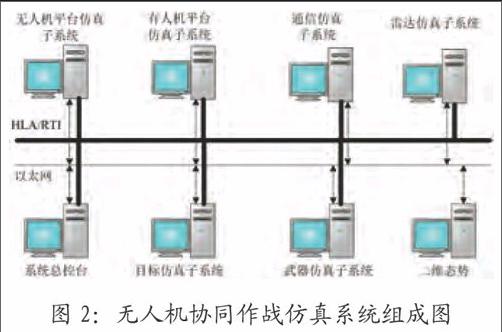
为建立基于无人机信息保障的无人机/有人机协同作战系统,无人机协同作战仿真系统环境采用基于HLA/RTI标准体系结构的方式构建,主要由系统总体控制管理模块、无人机平台仿真模块、有人机平台仿真模块、通信仿真模块、目标仿真模块、雷达仿真模块、武器导弹仿真模块以及二维态势显示仿真模块共八个仿真模块组成。仿真系统能够支持多种仿真作战想定流程的切换,通过XML文件实现作战想定场景的离线加载,实现无人机协同作战系统流程的仿真验证。仿真系统组成如图2所示。
3.1 系统总控台
在无人机协同作战仿真系统中,系统总控台负责实现无人机协同作战仿真系统的作战想定脚本录入及下发、仿真过程管控、仿真系统状态监控、仿真数据记录与回放等功能。
3.1.1 作战想定录入及下发
作战想定录入功能主要完成仿真系统仿真想定脚本文件的创建、编辑、修改、保存和下发等功能。
在仿真开始阶段,通过仿真想定录入功能在xml文件中设置红蓝双方的兵力部署、禁飞区等,作为情报获取的基本输入。并对红方兵力进行预先任务规划,规划出红方兵力在作战过程中的任务载荷和任务序列,以xml格式的进行保存,作为仿真中红方的作战想定脚本。在各仿真子系统均加入HLA/RTI联邦运行环境后,通过交互接口实现想定脚本的下发。
3.1.2 仿真启动/停止
在完成作战想定脚本下发后,在仿真管理控制界面上通过管控指令下发,将启动命令发送到各个仿真子系统,各个子系统解析作战想定脚本后,根据作战想定脚本完成各自的初始化后,开始按照时间步长进行推进,进入仿真运行阶段。
在系统运行过程中,若需要停止仿真系统的运行,则发送仿真中止指令,各个子系统接收到此命令后,退出仿真系统。
3.1.3 仿真暂停/恢复
在仿真过程中,如果需要暂停仿真系统的运行,可以通过仿真管理控制界面发送暂停指令,各个子系统接收到暂停消息后,分別处于暂停运行状态,只发送心跳消息,维持系统健康状态;在系统暂停后,若恢复系统的运行,则发送系统恢复运行命令,各个子系统接收到恢复运行消息后,进入正常运行模式,继续运行仿真。
3.1.4 系统状态监控
该功能用来监测各子系统是否正常运行。各子系统通过以太网与系统总控台相连,周期性向系统总控台发送心跳数据包,系统总控台根据心跳数据确认各子系统的健康状况,并通过人机交互界面在线统计各软件状态信息、显示仿真运行过程以及仿真管控的消息报文等。
3.1.5 数据记录与回放
通过RTI数据交互接口实时订购各仿真子系统与系统总控台的交互信息,以及各子系统的成员信息(运动状态),以文件形式存储数据,可导入指定数据库,支持存储文件查询与回放,为系统场景再现回顾、事后评估提供数据源。
3.2 作战平台子系统
构建作战平台仿真模型,实现对有人作战飞机、无人侦察飞机的属性特征、基本行为和作战能力的模拟。平台模型接收想定文件的配置参数,根据规划路径或给定的任务或指令运动,按设定的节拍周期性的处理和更新机动状态(位置、速度等),产生运动状态信息。
3.2.1 有人作战飞机平台子系统
在仿真过程中,有人作战飞机按照任务规划的航路点飞行至投弹点,投放精确制导武器对地面低动态目标实施攻击,完成在线任务规划、火控解算、武器控制等功能仿真。有人机平台子系统主要由毁伤计算模块、飞行决策模块、飞行控制模块、运动学模块和火控解算模块组成。
3.2.2 无人机平台子系统
在仿真过程中,无人机在指定区域按预定航路飞行,侦察目标,并通过数据链向有人机、地面指挥所发送目标侦察图像、目标指示信息。无人机平台子系统主要由运动学模块、目标探测模块、决策控制模块组成。
3.3 目标仿真子系统
建立地面目标仿真模型,完成对地面低动态时间敏感目标的仿真。该目标设定为地面移动车辆。在仿真过程中,目标车辆以20~80km/s的速度做匀速直线运动,当来袭导弹击中目标后,目标判断自身毁伤情况并退出仿真。目标仿真子系统主要由运动学模块、毁伤判断模块组成。
3.4 雷达仿真子系統
建立无人机载预警雷达探测模型,辅助无人机完成目标探测和跟踪,根据雷达技术体制和工作模式产生目标探测信息,并将目标指示信息上报至相应作战平台。雷达仿真子系统主要由探测区域判断、探测距离计算、探测状态判断、探测信息输出四个模块组成。
3.5 武器仿真子系统
建立空地导弹仿真模型,接收作战平台产生的目标装订信息和发射指令信息,完成导弹发射参数装订和发射控制;接收它平台产生的目标指示信息并实时更新导弹航路,完成导弹攻击过程的模拟;根据导弹攻击方式自主选择爆炸点位置,并上报目标毁伤情况。武器仿真子系统主要由导弹导引控制模块、弹目运动学模型、导弹动力学和运动学模型组成。
3.6 通信仿真子系统
建立武器协同数据链通信仿真模型,模拟有人机、无人机之间的数据通信功能,统计数据传输量并显示。在仿真过程中,根据有人机、无人机之间的距离判断是否完成数据链组网,并以一定的误码、漏组为有人机、无人机传输情报信息。通信仿真子系统主要由数据收发模块、组网规划模块、网络传输性能仿真模块组成。
3.7 二维态势显示子系统
二维态势显示子系统采用电子地图,动态、实时地显示战场实体运动态势、通信态势和交战态势。在仿真过程中,通过以太网接收各子系统产生的运行状态信息、产生的重要事件,将实体图标、实体位置、历史轨迹、武器打击范围、传感器探测范围、通信关系等显示要素以不同颜色、图标、线型等方式在态势图上显示。
4 仿真系统流程设计
4.1 仿真系统数据流向
设计仿真剧情时,系统能提供友好的人机界面对作战任务、战场环境、各类平台性能参数、平台上所搭载的传感器和武器、传感器和武器的性能参数进行配置。
系统为了便于用户对算法的配置,在想定成员中应该用树形结构列出仿真过程中所涉及的所有平台和装备,从而可以方便地完成各仿真子系统参数的设置、态势评估、系统性能评估等算法的配置。仿真系统内部各子系统和功能模块的数据分发及交互关系如图3 所示。
仿真开始后,各个联邦成员能够根据想定联邦成员中对算法的配置自动从数据库中调用对应算法,并以各种方式展现不同算法的计算结果。二维战场显示图能够直观反映当前仿真时刻,战区中各个仿真平台的相关信息;评估与效能分析部分所提供的对各种算法评估分析的曲线图则能够直观的反映算法性能的优劣,便于用户对算法的评价。
4.2 仿真系统信息流程
在该流程中,各仿真子系统在系统总控台的管控下完成对目标仿真子系统的实时打击过程。其中无人机平台仿真子系统及无人机雷达仿真子系统完成目标探测,有人机平台仿真子系统完成火控解算和打击任务;并通过二维态势显示仿真子系统实时显示作战流程,如图4所示。
5 仿真模型校验
5.1 校验方法
无人机协同作战仿真系统概念模型是对作战环境、作战实体及其交互关系、作战指控、作战行动、作战结果等内容的具体抽象和系统描述,应根据武器装备体系对抗所研究的内容和范围挑选相关领域的权威专家,依靠领域专家的经验性知识对其有效性进行评估。针对无人机协同作战仿真系统这一具体应用,概念模型校验应从如下几方面入手:
(1)概念模型是否与仿真系统需求相符合,是否包括了所有需求;
(2)建模过程中的假设、算法以及约束条件是否正确,所用数据是否有效,模型结构是否满足仿真系统应用目标的需求;
(3)概念模型是否满足仿真系统整体的性能指标要求;
(4)概念模型是否满足仿真系统的可信度要求,确定模型可接受的标准;
(5)概念模型与需求之间的可追踪性。
针对本仿真系统架构可构建3级仿真模型校验评估指标体系,从仿真需求、仿真架构、仿真实体模型、仿真实体信息交互等方面,采用专家打分法对本仿真系统进行模型验核。
5.2 评估指标体系
根据无人机协同作战仿真系统的结构及功能模块设计,针对本仿真系统得到如下仿真模型校验评估指标体系,如表1所示。
采用专家打分法,分别针对各级指标的完备性、合理性、正确性进行打分,综合各级指标的总评分,获得仿真系统指标评分为模型校验最终评分。其中,仿真系统校验评估指标体系主要对3级指标的合理性、正确性进行考察评分,对1、2级指标的完备性、合理性进行考察评分。
5.3 评估方法
5.3.1 各级指标特性评估方法
评分标准为:好(100-85)、中(84-70)、一般(69-60)、差(59-0),评审专家分别针对各级指标的完备性、合理性、正确性进行打分,各级指标特性评估计算方法如下:
各级指标综合评分为:指标评分 = 指标合理性评分 * 指标合理性权重 +指标正确性评分 * 指标正确性权重。
5.3.2 评分综合方法
各级指标总评分 = ∑(指标评分 * 指标权重);
系统模型校验评分 = ∑各级指标总评分;
5.3.3 综合评价标准
模型校验评分:合理可信(100-85)、比较合理可信(84-70)、基本合理可信(69-60)、不可信(59-0)。
5.4 校验结果
收集评审专家意见后,经过综合计算后得到模型校验评分为83.5分。根据综合评价标准,并在仿真开发策划时针对专家意见进行相应的落实和修改。主要的专家修改意见如下:
5.4.1 系统初始化模型
设计仿真剧情时,系统能提供友好的人机界面对作战任务、战场环境、各类平台性能参数、平台上所搭载的传感器和武器、传感器和武器的性能参数进行配置。
在系統初始化时进行,如果各仿真模型界面输入的参数超出合理范围,则系统给出提示框,要求用户重新输入。
5.4.2 网络数据通信模型
可通过连续不间断对固定长度数据的收发,检测数据传输有无丢包和出错及统计丢包出错率。当丢包出错率小于0.01%时,数据收发模块测试合格;也可编制专门的测试程序用于测试网络数据通信收发包的正确性,在程序中对收发包状况进行监控。若发送的数据包数和收到的数据包数一致,表明没有发生丢包。
5.4.3 坐标变换模型
可以通过检验在特殊位置的坐标转换是否正确;以及画出坐标转换曲线图,并分析其物理意义,来检验坐标变换模块的正确性。
5.4.4 运动模型
可通过二维或三维显示的方法来检验仿真实体运动模型的正确性。用于考察仿真实体的运动行为是否与其性能参数或相关的军事规则相符,相应的算法或计算公式是否正确地反映了作战实体的行为。
5.4.5 仿真结果保存路径模型
在程序能够稳定运行的情况下,在各种典型战情下进行仿真,检验仿真结果是否按照正确的格式生成相应的数据存储文件。如果正确,则认为该模块有效,否则应检查错误出处,分析原因,进行修正。
5.5 仿真展示
根据仿真模型校验结果完成对仿真系统的修改和完善,形成基于无人机火控级情报保障的无人机/有人机协同作战系统流程仿真。系统仿真过程中的系统总控台及二维态势显示如图5、6所示。
6 结论
上述仿真过程演示中,包含了部分动态参数的调整。根据对协同作战打击效果的仿真结果统计,分析得出无人机情报信息进入火力单元的时效性将大大影响杀伤链闭环时间、作战飞机生存能力(前出距离/留空时间)以及导弹武器命中概率等指标。
在现代空战中,为适应快速作战战场环境、提高短时作战效率,要求侦察型无人机提供给平台或指挥机构的情报数据具有火控质量;为指挥人员节约决策、发布战时指令的时间,必要时甚至能直接指导火控雷达完成“盲打”,充分发挥无人机在战场上的应用价值。因此使无人机具备实时高效的信息获取与传输能力、开展机间数据链路设计和研制迫在眉睫。
参考文献
[1]张军良.基于HLA的分布式飞行指挥仿真系统设计[J].无线电工程,2014(04):10-13.
[2]刘传波.协同作战仿真系统的时间同步机制研究与分析[J].计算机工程与应用,2010,46(23):223-226.
[3]任宏光,刘颖.无人机侦察打击一体化武器系统发展[J].飞航导弹,2009(06):47-49.
[4]张崔霞,周新等.红蓝双方攻防对抗仿真建模技术[J].指挥信息系统与技术,2012,3(06):10-13.
[5]王芳,周桂钧.大型察打一体无人机体系化运用研究[J].飞航导弹,2014(09):66-70.
[6]陈小阳,邢继娟.武器装备体系对抗仿真概念模型校验研究[J].军事运筹与系统工程,2013,27(03):70-75.
[7]张永亮,高志年.作战仿真中一体化建模问题研究[J].军事运筹与系统工程,2013,27(01):63-66.
