
单闭环磁盘驱动读取系统性能分析与参数设计
2017-05-10 13:54毛帅
电子技术与软件工程 2017年8期
毛帅
摘 要
在现代科学技术的众多领域中,自动控制系统起着越来越重要的作用。随着电子计算机技术的发展和应用,在机器人控制、导弹制导以及核动力等高新技术中,自动控制计数具有特别重要的作用。从工程角度讲,被控制的对象一般接收的信号都是模拟信号,这就有一定的物理意义,而物理学是一种理论性较强的学科。未来自动化的设备将会应用更加广泛,自动化设备也会更加智能,这些都是建立在自控原理之上的。磁盘可以方便有效的储存信息。磁盘驱动器则广泛用于从便携式计算机到大型计算机等各类计算机中,是控制工程的一个重要应用实例。本次任务是如何让磁盘系统精确读取。
【关键词】自动控制 自动化 磁盘系统
1 原系统性能分析
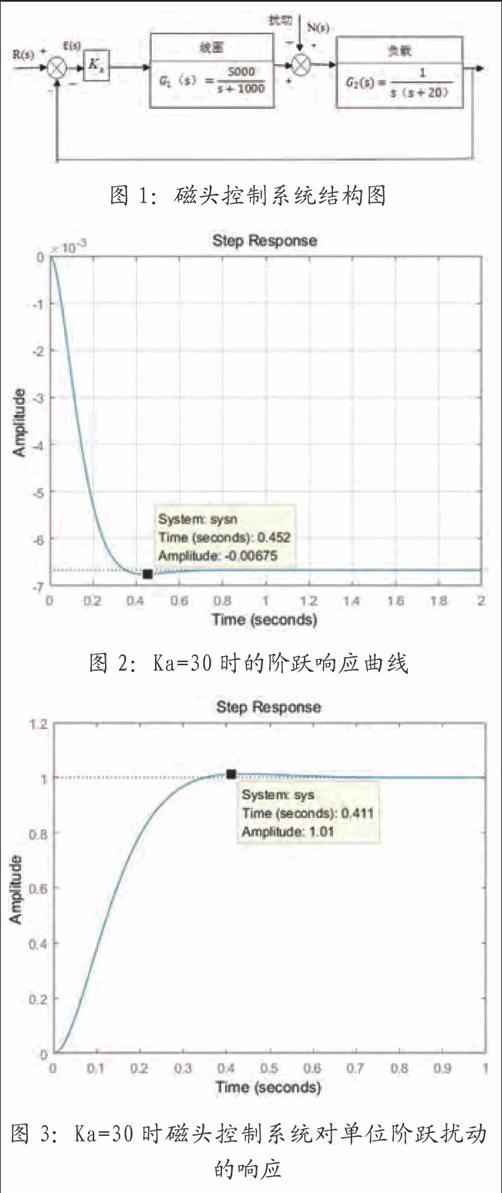
1.1 磁頭控制系统结构图
如图1所示。
1.2 校正前系统开环传递函数
由初始条件可得:
其开环传递函数为:G(s)=(Ka?4)/(s(s/1000+1)(s/20+1))
此时可得:(K=Ka)?4
1.3 校正前系统闭环传递函数
闭环传递函数为:
?(s)=(Ka?4)/(s(s/1000+1)(s/20+1)+Ka?4)
1.4 校正前系统稳定性能分析
该闭环函数的特征方程为:
D(s)=s^3+1020s^2+20000s+5000Ka
在绘制劳伦斯表后,当Ka=4080时,b1=0,出现临界稳定情况。可得辅助方程
1020+5000*4080=0
解其方程得系统的一对纯虚根为s1,2=±141.4j。显然,此时使系统稳定的K_a值范围应取0 2 设计系统 在控制工程中,几乎所有的控制系统都是高阶系统,即用高阶微分方程描述的系统。对于不能用一、二阶系统近似的高阶系统来说,其动态性能指标的确定是比较复杂的。工程上常采用闭环主导极点的概念对高阶系统进行近似分析,或直接应用MATLAB软件进行高阶系统性能分析。通过计算及绘制根轨迹图得出系统闭环根轨迹特性,通过其阶跃响应可知其稳定性。 分析N(s)与R(s)的不同情况 (1)当N(s)=0,R(s)=1/s时 误差信号 E(s)=1/(1+Ka G1 (s)G2 (s)) Rs 上式表明系统在单位阶跃输入作用下的稳态跟踪误差为零。这一结论与取值无关。 当N(s)=0时 闭环传递函数为: ?(s)=C(s)/R(s) =(Ka G1 (s) G2 (s))/(1+Ka G1 (s) G2 (s) ) =(5000Ka)/(s^3+1020s^2+20000s+5000Ka) 此时取Ka=30利用MATLAB文本绘制响应曲线 当Ka=30时,此时的程序文本和图形为: num=[150000];den=[1,1020,20000,150000];step(num,den) 如图2所示。 当Ka=30时的超调量符合系统要求。则取Ka=30.。 (2)当R(s)=0,N(s)=1/s时。系统对N(s)的输出为 C(s)=(G2 (s))/(1+Ka G1 (s)G2 (s)) N(s) Ka=30利用MATLAB文本绘制响应曲线图4 此时程序文本和图形为: Ka=[10 30];T=[4 2]; for i=1:1:2 G1=tf([5000],[1 1000]); G2=zpk([],[0 -20],1); G=Ka(i)*series(G1,G2); sys=feedback(G,1); t=0:0.005:T(i); figure(i);step(sys,t);grid end figure(3);sysn=-feedback(G2,Ka(2)*G1); step(sysn,T(2));grid 由图3得,当N(s) 为单位阶跃信号时对系统的扰动影响并不大。 3 结束语 在查阅相关资料后,我选取了合适的Ka的值,最终得到了结果。通过对磁盘驱动器磁头控制系统的校正,保证了磁头的精确位置,减小参数变化和外部振动对磁头定位造成的影响。 参考文献 [1]胡寿松.自动控制原理(第六版)[M].北京:科学出版社,2001. [2]何联毅,陈晓东.自动控制原理同步辅导及习题全解[M].北京:中国矿业大学出版社,2006. [3]曹柱中.自动控制理论与设计[M].上海:上海交通大学出版社,1995. [4]廖晓钟,刘向东.自动控制系统[M].北京:北京理工大学出版社,2005. [5]张培强.MATLAB语言[M].合肥:中国科技大学出版社,1995. [6]王孝武,方敏等.自动控制理论[M].北京: 机械工业出版社,2009. [7]黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2001. [8]何衍庆.MATLAB语言的运用[M].北京:化学工业出版社,2003. [9]周又玲.MATLAB在电气信息类专业中的应用[M].北京:清华大学出版社,2011.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
电子测试(2018年6期)2018-05-09
铁道通信信号(2016年12期)2016-06-01
发明与创新(2015年30期)2015-02-27
河南科技(2014年24期)2014-02-27
