基于车道级基础路网的DynasTIM仿真路网建模*
2017-05-18 11:51张汉林黄敏张学强
中山大学学报(自然科学版)(中英文) 2017年1期
张汉林,黄敏,张学强
(中山大学工学院∥广东省智能交通系统重点实验室∥智能交通研究中心,广东 广州 510006)
基于车道级基础路网的DynasTIM仿真路网建模*
张汉林,黄敏,张学强
(中山大学工学院∥广东省智能交通系统重点实验室∥智能交通研究中心,广东 广州 510006)
分析了车道级基础路网和DynasTIM路网在路网构成要素、路网层次、路网要素间关联关系三方面的差异,其中车道级基础路网分3层,路网要素主要包括路段、路段节点、子路段节点、子路段等,而DynasTIM路网分两层,路网要素包括节点、节点连接线、节段、节段左边线等,从而找出从车道级基础路网到DynasTIM路网转换的要素对应关系和整合、提取方法,最后从车道级基础路网提取数据并按照DynasTIM路网的路网模型进行表达。该文成果简化了DynasTIM路网的建模工作,也为不同路网模型之间的转换提供了一种行之有效的思路。
仿真软件;DynasTIM;车道级基础路网;智能化建模
随着社会经济的发展,社会各行各业都在追求更高的效率。道路交通建设作为我国基础设施建设的其中一部分内容,对国家经济的发展起着非常重要的作用。21世纪的道路交通正在朝着大型化、高速化、专业化的方向发展[1],对交通管理与规划的要求越来越高。DynasTIM作为一款用于路网动态交通流实时分析、仿真、预测和优化的大型数据处理软件系统,能够为交通决策提供可信度高的支持[2-3],未来能为互联的智能车辆动态规划最优的出行方案。然而,对路网拓扑关系及道路几何条件的描述是交通仿真模型模拟交通状态的基础[4-10],DynasTIM也需要在建立好的路网模型基础上,各种功能才能够实现。一般而言,仿真路网建模耗费的时间成本高,可移植性差[11],饶明雷、黄敏等[12-13]学者曾经提出一种基于通用路网平台的路网模型转换方法,极大提高了仿真软件路网建模的效率,本文在此基础上,考虑由通用路网平台(车道级基础路网)向DynasTIM路网的转换。首先分析了面向微观交通仿真的车道级基础路网数据模型,然后将其与DynasTIM路网模型做对比,最终通过编程实现从车道级基础路网到DynasTIM路网的智能化建模。
1 车道级基础路网简介
车道级基础路网来源于图论[14],可描述为包含路段、路段结点、子路段、子路段结点、有向子路段、车道、车道连接器等要素构成的3层复杂网络[12,15]。图1为车道级基础路网ORM (Object Role Modeling)图。
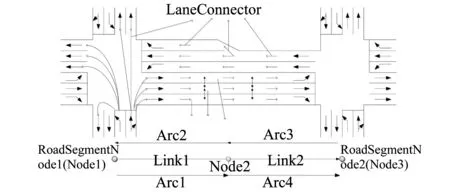
图1 车道级基础路网模型图Fig.1 Lane-level basic road network model chart
车道级基础路网的第一层由道路基本单元组成,包括路段(RoadSegment)和路段结点(RoadSegmentNode)两个要素,在此基础上,以路段(RoadSegment)为参照,将路段在交通组织发生变化处打断,生成子路段(Link)和子路段结点(Node)两个要素,其中,子路段(Link)是有向线段,其首尾各有一个子路段结点(Node)进行界定,子路段(Link)开始于起始结点,终止于终止结点。在子路段(Link)的基础上,根据交通流方向划分子路段为不同的有向子路段(Arc),三者构成基本建模单元组成车道级基础路网的第二层。路网的第三层则在第二层的基础上细化车道描述,包含车道(Lane)和车道连接器(LaneConnectors)两个要素。整个路网的结构如图2所示。

图2 车道级基础路网ORM图Fig.2 ORM figure of lane-level basic road network
2 DynasTIM路网模型概述
DynasTIM路网可描述为包含节点、节点连接线、节段、节段左边线、车道、车道连接器组成的双层网络。
DynasTIM路网的第一层由基本建模单元节点(Node)、节点连接线(Link)以及节段(S)3个要素组成。其中节点是将道路交叉口抽象形成的点要素,记录着交叉口的位置、类型等数据,节点连接线是代表两个节点间交通流方向的有向线段,节段是在同一交通流方向交通组织变化处打断形成的,另外,每个节段最内侧车道的左分界线称为节段左边线(LeftCurbs),记录着节段最左端的位置数据。每一条节点连接线对应一个或者多个节段。路网的第二层则在第一层的基础上细化车道描述,包含车道(Lane)和车道连接器(LaneConnectors) 两个要素。整个路网的结构如图3所示。
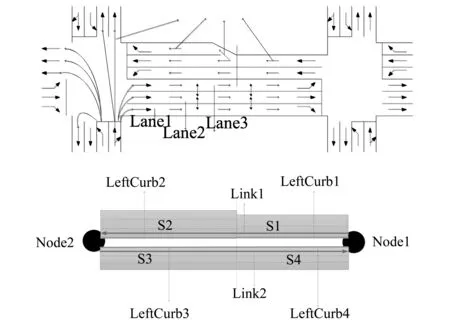
图3 DynasTIM路网模型图Fig.3 DynasTIM road network model chart
图3中,节点Node1、Node2是交叉口,节段左边线LeftCurbs1、LeftCurbs2、LeftCurbs3、LeftCurbs4分别是节段S1、S2、S3、S4的左边线,Link1是从节点Node1到Node2的节点连接线,Link2是从节点Node2到Node1的节点连接线,节段S1、S2与节点连接线Link1相关联,节段S3、S4与节点连接线Link2相关联。
不同层次之间,用ORM (Object Role Modeling)图建立DynasTIM路网各要素之间的关联关系,如图4所示。
3 DynasTIM路网数据提取及转换
通过以上分析可知,DynasTIM路网的节点(Node)是通过X、Y坐标的数据得到定位的,可以通过车道级基础路网的路段结点(RoadSegmentNode)的位置信息得到;节段左边线(LeftCurb)是根据节段左边线两端的坐标得到定位的,可以通过提取车道级基础路网子路段(Link)的控制点坐标获取左边线两端坐标数据;节段(S)需要提取车道级基础路网的有向子路段(Arc)关于车道数等数据;车道(Lane)需要提取车道级基础路网车道的车道宽度等数据;车道连接器(LaneConnector)需要提取车道级基础路网中车道连接器起始车道以及到达车道集。此外,对每一条节点连接线而言,在车道级基础路网中,没有可以直接与之对应的要素可以供数据提取,需要将车道级基础路网中位于两个子路段结点之间的N个子路段依次进行拼接得到一条完整的DynasTIM路网节点连接线(Link1),如果此道路有相反方向的交通流,再由节点连接线(Link1)复制出一条起始节点、终止节点与此节点连接线相反的节点连接线(Link2),从而实现节点连接线的数据提取。DynasTIM路网要素与车道级基础路网要素之间的对应关系如表 1 所示。
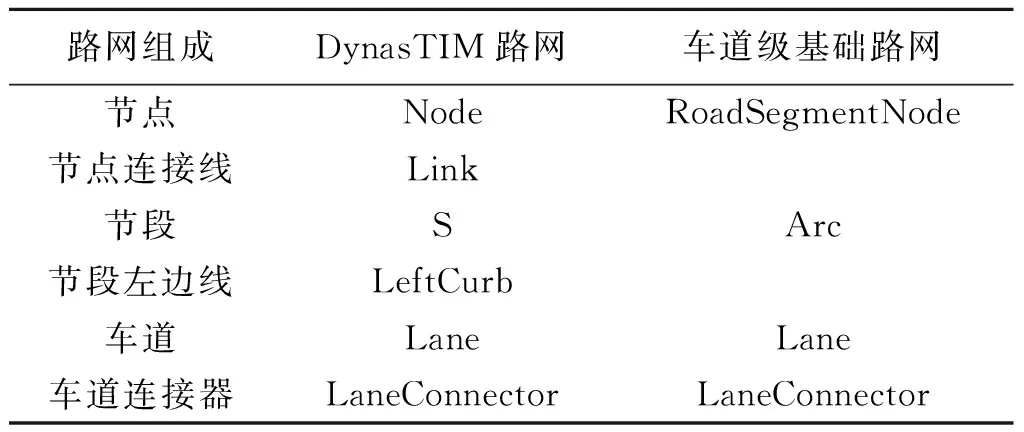
表1 车道级基础路网与DynasTIM路网要素对应表Table 1 Corresponding elements between DynasTIM roadnetwork and lane-level basic road network
DynasTIM路网提取的整体流程为:第一步提取节点数据,第二步提取节点连接线数据,第三步提取节段数据,第四步提取车道数据,第五步提取车道连接器数据,最后提起节段左边线数据。
正如表1所示,节点、车道连接器、节段和车道,在车道级基础路网中均有相应的要素与之对应,因此,下面重点介绍提取节点连接线(Link)以及节段左边线(LeftCurb)的过程。
3.1 节点连接线的提取流程
第1步:遍历提取到的节点,获得节点集,在车道级基础路网中,找出起始结点在此节点集中的所有子路段(Link);
第2步:判断第1步中找到的这些子路段(Link)的终止结点是否也在提取到的节点集内,如果是,将此条子路段(Link)直接作为DynasTIM路网2个节点之间的节点连接线,并存储到节点连接线集合中,否则转到第3步;
第3步:对上一步没有存储的每条子路段A,在车道级基础路网的子路段表中,查找到一条子路段B,B的起始结点跟A的终止结点相同,将A与B顺次拼接,拼接完检验此子路段的终止结点是否在节点集内,如果是,将拼接完的子路段作为DynasTIM路网2个节点之间的节点连接线,并存储到节点连接线集合中,如果不是,继续执行第3步。同时,每拼接成功一条节点连接线,依次记录此节点连接线的子路段(Link)组成。前3步提取的示意图如图5所示。
第4步:获得拼接成功的节点连接线以后,根据与子路段相关联的有向子路段个数来判断此道路是单行道还是双行道,如果是双行道,则复制出一条起始节点、终止节点与此节点连接线相反的节点连接线,存储到节点连接线集合中,如果是单行道,不执行复制操作。其提取流程如图6所示。
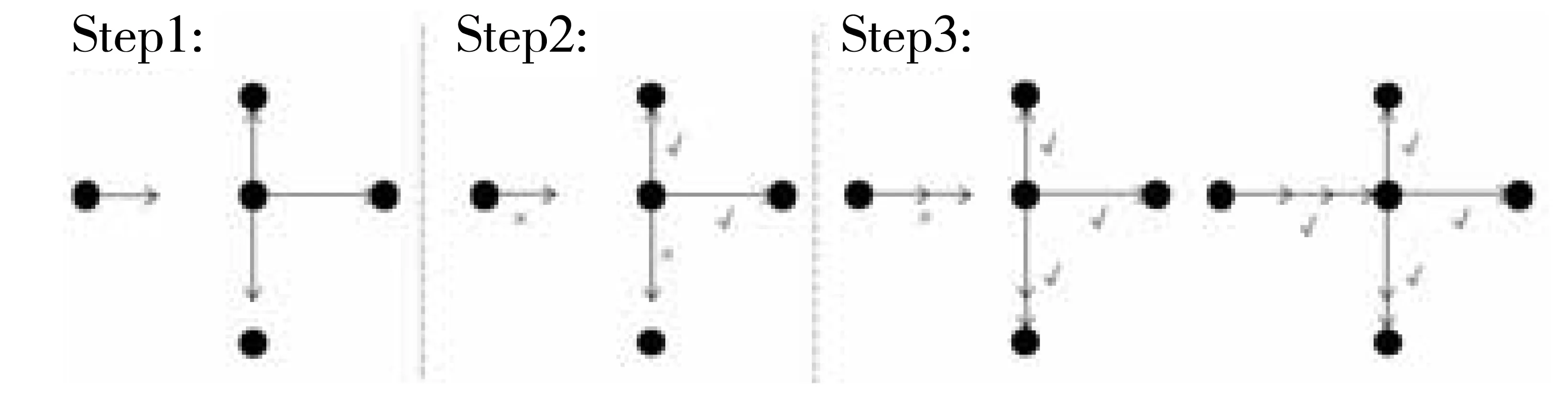
图5 节点连接线提取示意图Fig.5 Extracting diagram of node connector lines
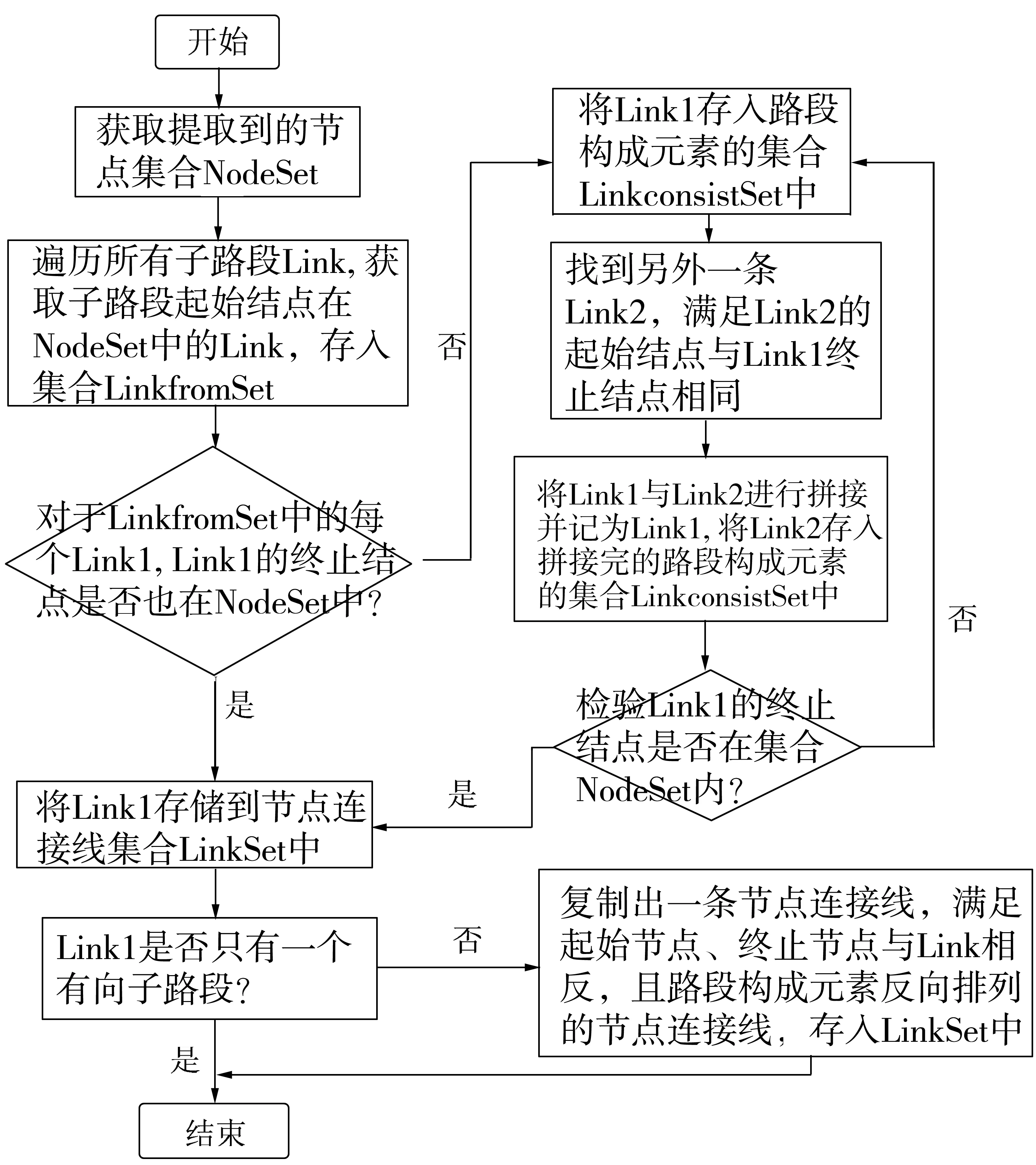
图6 节点连接线提取流程图Fig.6 Transformation flowchart of node connector lines
3.2 节段左边线的提取流程
第1步:获取车道级基础路网的所有子路段(Link)要素;
第2步:对于获取到的每一条子路段(Link)要素,因为它是线要素,而线是由很多的点组成的,此步骤获取每一条子路段(Link)上的所有点,并最终提取起点和终点的坐标作为节段左边线的数据;
第3步:因为一个子路段(Link)包含一个或者两个有向子路段(Arc),所以判断此子路段(Link)是否包含两个有向子路段(Arc),如果是,则复制出起始点坐标、终止点坐标与第2步提取到的节段左边线相反的另外一条节段左边线,否则不进行复制操作。其提取流程如图7所示。
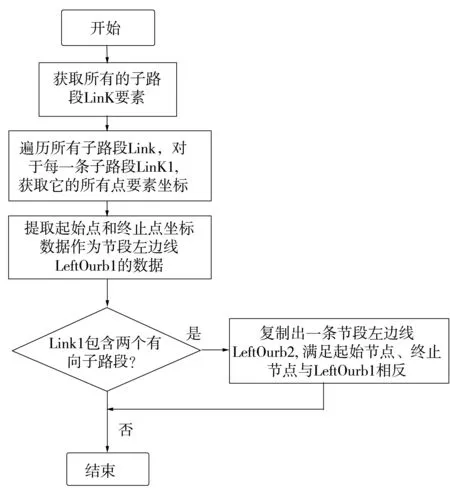
图7 节段左边线提取流程图Fig.7 Transformation flowchart of segment left lines
4 应用实例
选取广州内环区域路网作为实例分析。利用C#、ArcGIS二次开发组件和MicrosoftAccess关系数据库建立实例区域的车道级基础路网,如图8所示。

图8 车道级基础路网原图Fig.8 Lane-level basic road network figure
基于本文采用的DynasTIM仿真路网数据提取及转换方法,可自动生成DynasTIM仿真路网文件(.xml),打开后结果如图9所示。生成的DynasTIM仿真路网与车道级基础路网地图一致,能够满足交通仿真的要求。
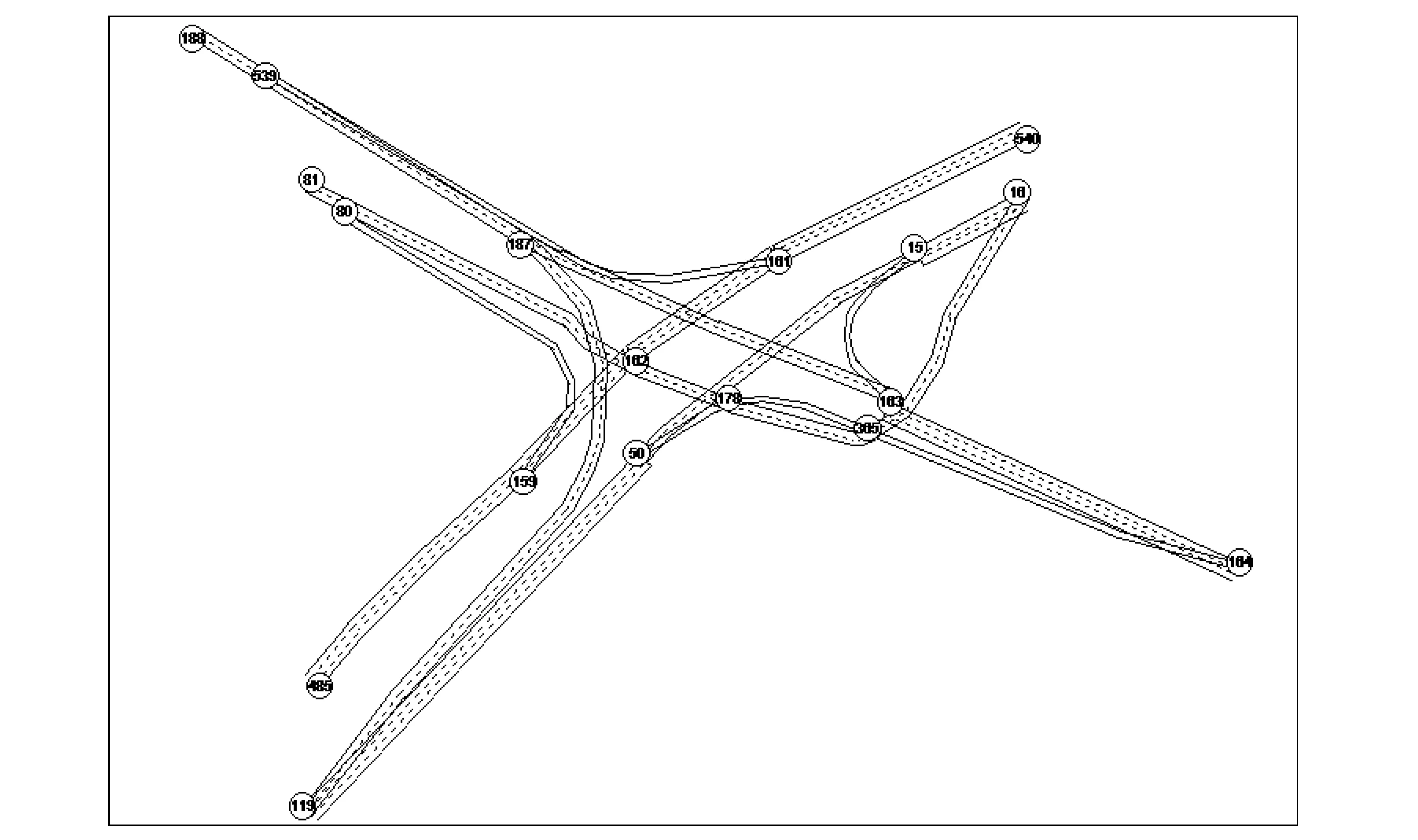
图9 转换后的DynasTIM路网图Fig.9 DynasTIM road network figure after transformation
5 结 语
在车道级基础路网的基础上,本文通过对比DynasTIM路网和车道级基础路网的表达差别,实现了从车道级基础路网模型到DynasTIM路网模型的智能化转化,并用实例进行了验证。这种方法能够极大地减轻了建模工作量,为实现不同路网模型转换提供了一种行之有效的思路。针对于庞大的交通仿真路网模型群体,在后期的研究中,应该完善车道级基础路网表达,使之成为更加精细化的路网,为路网模型的转换奠定基础。
[1] 张思琦.浅析交通运输业的可持续发展[J].东方教育,2015(11):51-52.ZHANGSQ.Analysisonthesustainabledevelopmentoftransportation[J].China-Trainers,2015(11):51-52.
[2] 林群,关志超,杨东援.基于流程再造与决策支持的城市交通仿真系统研究[J].中山大学学报(自然科学版),2008,47(7):14-19.LINQ,GUANZC,YANGDY.Flowreforgeanddecision-makingsustainbasedonresearchofurbantrafficsimulationsystem[J].ActaScientiarumNaturaliumUniversitatisSunyatseni, 2008,47(7):14-19.
[3] 赵力萱,余志,何兆成,等.基于移动通信数据的交通信息仿真系统[J].中山大学学报(自然科学版), 2009,48(4):24-30.ZHAOLX,YUZ,HEZC,etal.Atrafficinformationsimulationsystembasedonmobilecommunicationsdata[J].ActaScientiarumNaturaliumUniversitatisSunyatseni, 2009, 48(4): 24-30.
[4] 聂佩林,余志,何兆成.基于MapInfo电子地图的Paramics仿真基础路网构建[J].系统仿真学报,2008,20(1):214-217.NIEPL,YUZ,HEZC.CreatingbasicroadnetworkforParamicsfromMapInfodata[J].JournalofSystemSimulation, 2008, 20(1):214-217.
[5] 邹智军,杨东援.路网描述仿真描述[J].西安公路交通大学学报, 2001, 21(4): 33-35.ZOUZJ,YANGDY.Simulationmodelsforroadnetworkrepresentation[J].JournalofXi’anHighwayUniversity, 2001, 21(4): 33-35.
[6] 程重用,王坚,马云龙.世博微观交通仿真系统的路网建模研究[J].机电产品开发与创新, 2011, 24(1): 89-90.CHENGZY,WANGJ,MAYL.Researchofroadnetworkmodelingintheexpotrafficsimulationsystem[J].Development&InnovationofMachinery&ElectricalProducts, 2011, 24(1): 89-90.
[7] 赵宾植,梁虹,周园.基于GIS的微观交通仿真路网数据模型[J]. 云南大学学报(自然科学版), 2009, 31(51): 227-233.ZHAOBZ,LIANGH,ZHOUY.AroadnetworkdatamodelforintegrationofmicroscopictrafficsimulationandGIS[J].JournalofYunnanUniversity, 2009, 31(51): 227-233.
[8]TANGDM,LIX,JIANGYJ.Microscopictrafficsimulationorientedroadnetworkdatamodel[C]//Proceedingsofthe2010 2ndInternationalConferenceonFutureComputerandCommunication.Wuha,China:ICFCC, 2010:V287-V291.
[9]WANGWQ,ZHANGWC,YANGXK.Trafficmicro-simulationofurbanroadnetwork,ICTIS2011:Multimodalapproachtosustainedtransportationsystemdevelopment-information,technology,implementation[C]//Proceedingsofthe1stInternationalConferenceonTransportationInformationandSafety,Wuhan,China:ICTIS, 2011: 1042-1052.
[10]LIANGH,WUJP,CHENGM.AstandardizeddatamodelfordatasharingofGISandmicroscopictrafficsimulationsystem[C]//Proceedingsof2008IEEEInternationalConferenceonServiceOperationsandLogistics,andInformatics,IEEE/SOLI2008.USA:IEEE, 2008: 116-120.
[11] 张奇,商蕾.面向微观交通仿真的路网建模模块实现方法[J].交通信息与安全, 2010, 28(3):112-115.ZHANGQ,SHANGL.Methodtoimplementroadnetworkmodelingmoduleinmicroscopictrafficsimulation[J].JournalofTransportInformationandSafety, 2010, 28(3):112-115.
[12] 黄敏,饶明雷,李敏.面向仿真的车道级基础路网模型及其应用[J].系统仿真学报,2014(3):657-661;681.HUANGM,RAOML,LINM.Researchoflane-levelbasicroadnetworkmodelforsimulationanditsapplication[J].JournalofSystemSimulation, 2014(3):657-661;681.
[13] 饶明雷. 车道级基础路网数据模型及其在ITS中的应用研究[D].广州:中山大学,2013.RAOML.Researchoflane-levelbasicroadnetworkdatamodelanditsapplicationinITS[D].Guangzhou:SunYat-senUniversity,2013.
[14]SHEFFIY.Urbantransportationnetworks:Equilibriumanalysiswithmathematicalprogrammingmethods[M].NJ:PrenticeHall,1984:10-18.
[15] 张小兰,陈晓翔,黄敏.面向指路标志系统的交通网络数据模型及应用[J].地理与地理信息科学,2006, 22(6):45-47.ZHANGXL,CHENXX,HUANGM.Transportationnetworkdatamodelforguidesignsystemanditsapplication[J].GeographyandGeo-InformationScience, 2006, 22(6):45-47.
Modeling DynasTIM simulation road network based on lane-level basic road network
ZHANGHanlin,HUANGMin,ZHANGXueqiang
(School of Engineering∥ Guangdong Provincial Key Laboratory of Intelligent Transportation System∥Intelligent Transportation System Research Center, Sun Yat-sen University,Guangzhou 510006,China)
This work firstly analyzes the differences between DynasTIM road network and lane-level basic road network from three aspects including components, levels and the relationship of the road network components. The lane-level basic road network can be divided into three layers and it mainly includes Roadsegment, Roadsegmentnode, Node and Arc. While DynasTIM road network can be divided into two layers and mainly includes Node, Link, Segment and LeftCurb. So the corresponding relationship of the two road network components, integrated and extract method can be easily found. Finally, it realizes intelligently modeling from lane-level basic road network to DynasTIM road network. It not only greatly simplifies modeling effort but also provides an effective way for transformation among different road network models.
simulation software; DynasTIM; lane-level basic road network; intelligently modeling
10.13471/j.cnki.acta.snus.2017.01.009
2016-05-11 基金项目:广州市科技计划项目(201510010247); 广东省科技计划项目(2016020223006, 2016B090918038, 2015B010110005)
张汉林(1991年生),男;研究方向:路网建模及路网模型转换;E-mail:876407112@qq.con
黄敏(1975年生), 女;研究方向:路网数据模型与道路交通标志标识系统;E-mail:huangm7@mail.sysu.edu.cn
TP
A
0529-6579(2017)01-0053-06
猜你喜欢
铁道建筑技术(2022年10期)2022-10-28
中国典型病例大全(2022年12期)2022-05-13
中国典型病例大全(2022年9期)2022-04-19
电子制作(2022年1期)2022-01-28
电子制作(2021年14期)2021-08-21
中国交通信息化(2019年11期)2019-08-13
中国交通信息化(2019年1期)2019-03-26
中国交通信息化(2019年2期)2019-03-25
环球飞行(2018年7期)2018-06-27
筑路机械与施工机械化(2014年3期)2014-03-01