基于粒子群算法的磁悬浮小球控制
2017-05-18 21:48刘睿轩
环球市场信息导报 2017年2期
刘睿轩
磁悬浮系统是一个典型的非线性复杂系统,具有不确定性和开环不稳定性为了获得更好的磁悬浮小球系统控制性能,本文对系统的控制算法进行了深入研究。PID是经典的控制器,其性能主要受三个参数(Kp,Ki,Kd)影响。不同于传统的试凑法获得PID参数,本文在这里运用粒子群算法来优化设计PID控制器的三个参数。粒子群算法是一种群优化算法,具有搜索速度快、效率高,适合于实值型处理等优点,此外本文还选取了另外一种常见的优化算法差分进化算法来跟粒子群算法进行比较。本文首先用Matlab对粒子群算法进行编程;其次通过Simulink对试凑法、粒子群优化法、差分进化优化法建模并进行仿真实验;最后比较所生成的阶跃响应曲线和对应的性能指标,得出粒子群算法作用于PID控制器可获得更好的动态性能和稳定性能的结论。
近年来,磁悬浮技术在很多领域得到广泛的应用,如磁悬浮列车、主动控制磁悬浮轴承、磁悬挂天平、磁悬浮小型传输设备、磁悬浮测量仪器、磁悬浮机器人手腕、磁悬浮教学系统等。
目前,磁悬浮技术得到了长足的发展。如国内外研究的热点是磁悬浮轴承和磁悬浮列车。而应用最广泛的是磁悬浮轴承。磁悬浮没有传统的轮轨摩擦阻力,具有效率高、低能耗、无需润滑、寿命长等优点。因此磁悬浮列车能达到传统陆地交通工具前所未有的运行速度,适合于解决土地面积有限、人口多、交通紧张的地区、城郊间交通运输问题。磁轴承在能源、交通、机械、生命科学等领域具有广阔的应用前景。
然而,磁悬浮系统是一个典型的非线性复杂系统。由于模型误差和各种因素如外界干扰、磁铁温度变化等,都会使它的控制产生误差,所以磁悬浮系统具有不确定性和开环不稳定陸。而且很多磁
悬浮技术的应用场景中都要求磁悬浮系统能够具有较大的气隙,这加大了它的控制难度,也使磁悬浮系统的控制更加具有研究价值和意义,
磁悬浮控制系统的建模与分析
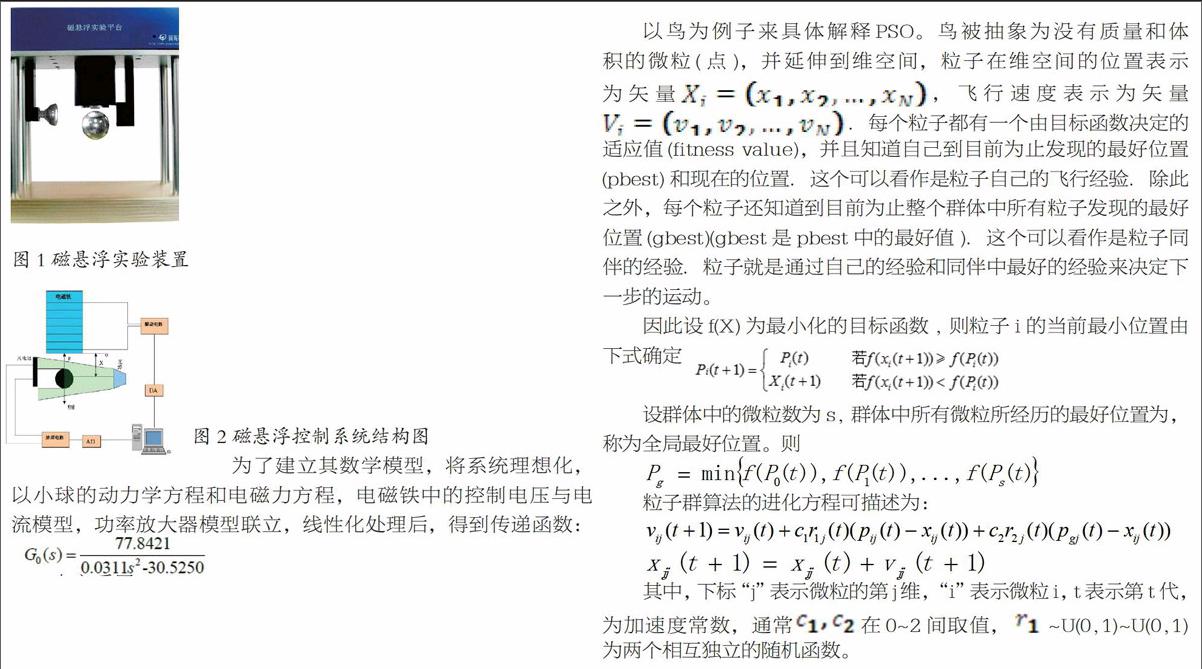
本文采用香港固高科技有限公司设计制作的磁悬浮实验装置(如图1所示)作为研究平台。它是一个典型的吸浮式悬浮系统。使钢球就可以悬浮在空中而处于平衡状态。
系统采用光源和光电位置传感器组成的无接触测量装置检测钢球与电磁铁之间的距离的变化和变化率。采用磁铁中控制电流的大小作为磁悬浮控制对象的输入量。其系统结构图如图2所示。图2磁悬浮控制系统结构图
本文采用Matlab/Simulink对系统进行建模仿真与实施控制实验。Simulink可以用于建模、分析和仿真各种动态系统的交互环境,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
PID控制器的搭建及算法介绍
PID控制器
传统工业控制中应用最广泛最成熟的为PID控制器。即比例一积分一微分控制。PID控制器是一种线性控制器。它根据给定值和实际值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制量。对被控对象进行控制。
磁悬浮控制系统是典型的非线性迟滞系统。所以难以为系统建立精确的数学模型。传统的PID控制由于得不到精确的数学模型,并且动态性能较差,所以控制效果并不很理想。
算法介绍
粒子群优化(Particle Swarm Optimization,PSO)算法。粒子群优化算法(PSO)的基本思想是通过群体中个体之间的协作和信息共享来寻找最优解,PSO的优势在于简单容易实现并且没有许多参数的调节。目前已被广泛应用于函数优化、神经网络训练、模糊系统控制以及其他遗传算法的应用领域。
注意:这里调节微粒飞向自身最好的位置方向的步长。调节微粒向全局最好位置飞行的步长。
综上所述,粒子群算法(PSO)的流程如下:初始化过程,对微粒群的随机位置和速度进行初始设定;计算每个微粒的适应值;对于每个微粒,将其适应值与所经历过的最好位置Pi的适应值进行比较,若较好,则将其作为当前的最好位置;对每个微粒,将其適应值与全局所经历的最好位置Pd的适应值进行比较,若较好,则将其作为当前的全局最好位置;根据方程上面的两个进化方程对微粒的速度和位置进行进化;如未达到结束条件通常为足够好的适应值或达到一个预设最大代数。则返回。
PID控制器在MATLAB下的实现与仿真结果及对比
PID控制器和优化算法
以粒子群优化算法(PSO)为例介绍优化算法是如何和传统的PID控制相结合的。下图中。粒子群算法与Simultnk模型之间连接的桥梁是粒子(即P/D控制器参数)和该粒子对应的适应值(即控制系统的性能指标)。优化过程如下:PSO产生粒子群(可以是初始化粒子群,也可以是更新后的粒子群),将该粒子群中的粒子依次赋值给PID控制器的参数,然后运行控制系统的Simulink模型,得到该组参数对应的性能指标,该性能指标传递到PSO中作为该粒子的适应值。最后判断是否可以退出算法。
性能指标。通常在阶跃函数作用下,测定或计算系统的性能。一股认为,阶跃输入对系统来说是最严峻的工作状态,如果系统在阶跃函数作用下的性能满足要求足,那么系统在其他形式的函数作用下。其性能也是令人满意的。本文中所用到的系能指标如上图所不:
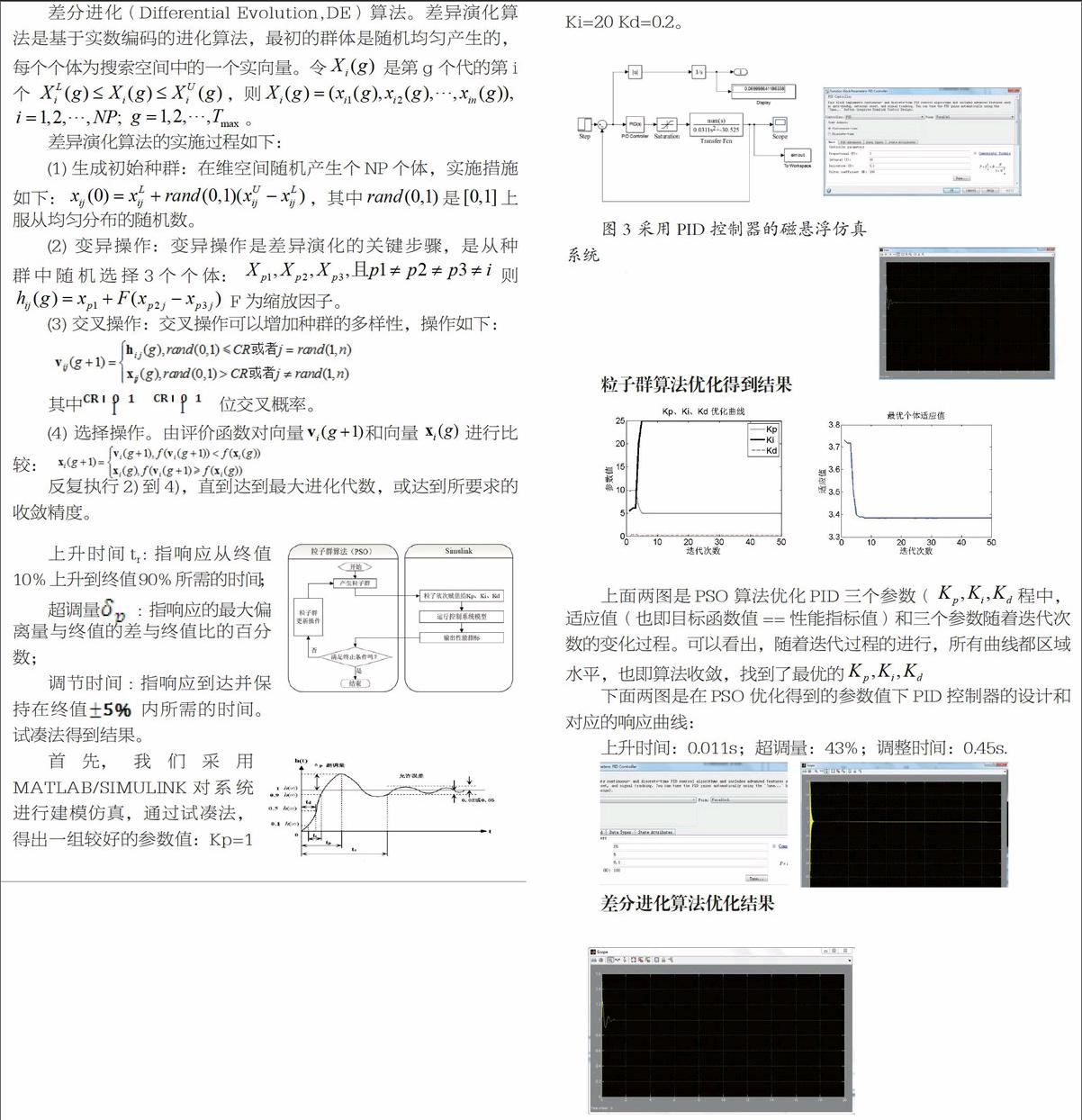
当采用PD控制器时建立的系统模型如图3所示。
仿真结果如图4所示。
图4PID控制器的系统仿真结果图
上升时间0.12s,超调量57.7%,调节时间0.6s。
上升时间:0.0125;超调量:1.54;调整时间:0.55。
传统的PID控制器无法良好的控制磁悬浮系统。为了获得更好控制性能,本文使用粒子群算法对PID参数进行优化设计。从而获得更加稳定、快速的控制效果。通过在Matlab/Simulink中分别建立其模型,进行仿真实验和实时控制实验。经过数次操作与对比可得出。粒子群算法作用于PID控制器可获得更好的动态性能和稳定性能。并且PSO算法的各项性能指标:上升时间、超调量、调整时间。均优于其他算法。
猜你喜欢
中华环境(2021年9期)2021-10-14
中华环境(2021年8期)2021-10-13
中华环境(2021年7期)2021-08-14
小学科学(学生版)(2021年4期)2021-07-23
石油沥青(2021年1期)2021-04-13
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
疯狂英语·新悦读(2017年6期)2017-06-24
制冷技术(2016年4期)2016-08-21
测绘科学与工程(2016年4期)2016-04-17
电测与仪表(2014年16期)2014-04-22