
基于ADAMS的柔索行走机器人机构仿真分析
2017-05-30 10:48刘毅杜燕飞孙汉文刘志春
科技风 2017年3期
关键词:机器人
刘毅 杜燕飞 孙汉文 刘志春
摘 要:针对柔索行走机器人结构特点,建立柔索行走机器人三维模型,并基于ADAMS仿真软件构建机器人虚拟样机模型,模拟了仿真机器人跨越防震锤的整个过程,并得到了机器人各行走轮的位移-时间曲线,验证了模型设计和越障过程的合理性,为机构设计提供数据方面的参考,为柔索行走机器人的研发提供可靠有力的依据。
关键词:柔索行走;机器人;ADAMS;运动学仿真
近年来,机器人的应用领域越来越广泛。尤其是用机器人代替人工实现柔索线路的自动化巡检已经成为目前电力机器人研究的热点之一。机器人仿真系统作为机器人设计和研究中方便、可靠的工具越来越受到重视,目前机器人动力学研究的主要方法有拉格朗日法、牛顿—欧拉法和凯恩方法等[ 1 ],南京林业大学的陈波等人利用三维建模软件SolidWorks和ADAMS联合建立仿生六足机器人的仿真模型[ 2 ]。
本文根据巡检机器人的工作环境及功能要求,对巡检机器人的本体结构进行了详细设计,并对巡检机器人的越障过程进行了规划[ 3 ]。并利用ADAMS虚拟样机对机器人的刚体模型和刚柔混合模型的越障过程进行了详细的仿真分析,验证了机器人越障的稳定性和动作规划的合理性。
1 基于ADAMS的高空作业机器人越障过程仿真分析
机器人在跨越障碍时,需要通过各手臂的配合动作来调整机器人的姿势,这就要求机器人具有良好的稳定性[ 4 ]。
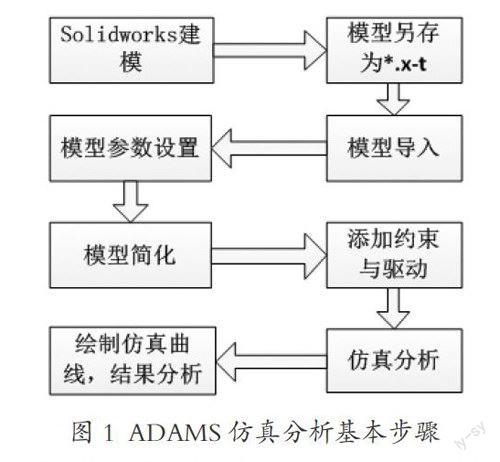
直接在ADAMS中建立機器人模型的过程较为复杂,因此为简化操作步骤,在SolidWorks中建立机器人三维模型后,导入ADAMS软件中[ 5 ]。具体操作步骤如图1所示:
通过以上步骤,将机器人虚拟样机导入ADAMS软件中。
1.1 高空作业机器人越障过程分析
根据机器人实际跨越防震锤的情况,对各驱动添加相应的函数表示[ 6 ],仿真机器人跨越防震锤的整个过程。
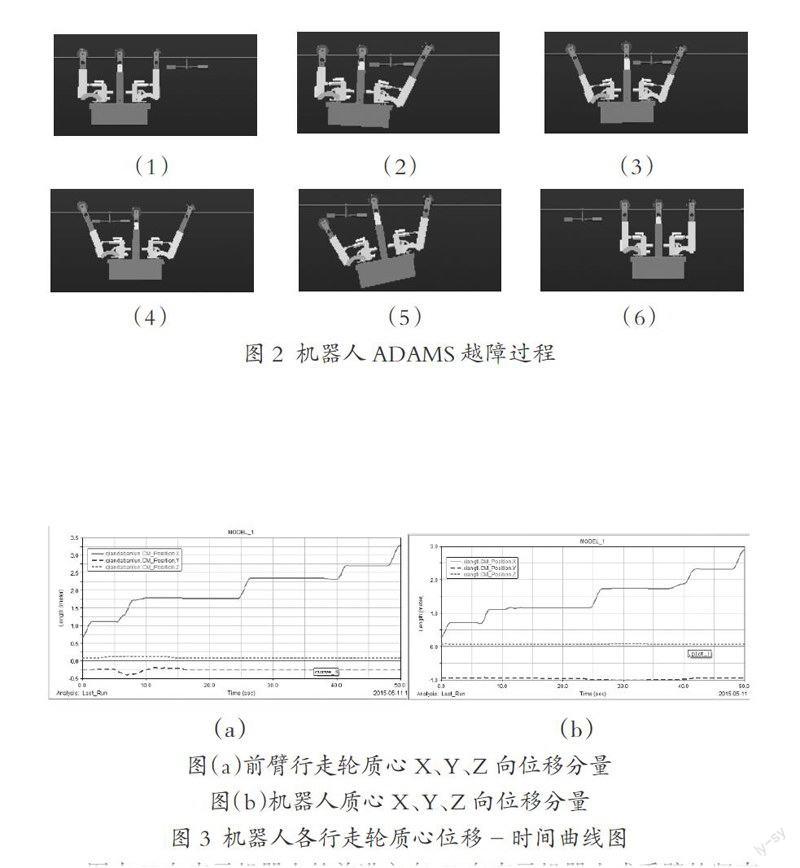
具体越障过程如图2所示:
机器人初始状态如图(1)所示。
三臂同时挂线,且处于收缩状态,当前臂检测到障碍时,手臂伸长,行走轮脱离导线然后打开,然后调整手臂关节完成前臂的越障,机器人继续前行至中臂上安装的光电传感器检测到障碍,为保证中臂和后臂的顺利越障,前臂伸长挂线的同时调整后臂的姿态,增大前后臂行走机构之间的距离。中臂伸长,行走轮打开,完成脱线动作,中臂收缩的同时前后臂伸长使控制箱下降,保证中臂行走轮的顺利避障,如图(2)-(4)所示。
因行走轮打开距离大于障碍物直径,故行走轮可直接穿过障碍物,机器人继续前行,后臂遇到障碍,中臂和后臂完成挂线动作,三臂恢复初始状态,如图(5)-(6)所示。机器人在三臂的配合下平稳快速地完成了整个越障过程。
1.2 高空作业机器人运动学仿真分析
在对机器人跨越防震锤的过程进行仿真后,利用ADAMS的后处理模块得到机器人行走轮在X、Y、Z三个方向的位移-时间曲线如图3所示。
图中X向表示机器人的前进方向,Y向表示机器人或手臂的竖直移动方向,Z向表示行走轮的开合方向。0-1.5s三个行走轮同时驱动机器人前进,X向位移增加,1.5s时前臂传感器检测到障碍,机器人停止前进;1.5s-6.5s前后臂配合动作完成前臂的越障过程,前臂伸长,行走轮打开脱线,重新挂线。由于行走轮和导线之间接触力的存在,前行走轮在Z方向会出现突变,符合实际情况,。8-12.5s表示中臂检测到障碍,前后臂伸长,Y向位移增大,然后前行走轮挂线,闭合,Z向位移发生相应变化,如12.5-16s所示。中臂检测到障碍,上升,行走轮打开,然后下降,中臂Y向曲线先上升后下降。26.5s时后臂检测到障碍,中臂上升完成挂线,此时中臂越障过程结束;后臂在34-48s内进行和前臂相同的越障过程,48-50s机器人继续前行,整个越障过程需要50s。通过提高机器人的行走速度可进一步缩短越障时间。
通过分析机器人的整个越障过程可以看出:
1)机器人控制箱的质心位移反映了整个机器人的重心变化,机器人在前、后机械臂脱离导线时会出现一定的波动,后逐渐趋于平稳。
2)整个机器人在跨越防震锤是所需时间为50s,提高了越障效率。
3)各个行走轮在整个越障过程中位移的变化也比较平稳,验证了越障步骤规划的科学性和合理性,同时验证了模型的可行性。
2 结论
本文用ADAMS建立了巡检机器人的虚拟样机,对柔索行走机器人的越障过程进行了详细的动力学仿真分析。得出机器人越障时各手臂以及行走轮的位移、速度仿真曲线,验证了机器人越障(下转第9页)(上接第7页)动作规划的合理性和结构设计的合理性,对评价机器人的综合性能起到了一定的借鉴作用。
参考文献:
[1] 白丽平.基于ADAMS的机器人动力学仿真分析[J].机电工程,2007,24(7):74-77.
[2] 陈波,唐晶晶,姜树海.基于ADAMS的仿生六足机器人运动仿真[J].计算机仿真,2012,29(9):182-186.
[3] Xiao Xiaohui,Wu Gongping.Dynamic simulation and experimental study of inspection robot for high-voltage transmission-line, Journal of Central South University of Technology,2005(6):726-731.
[4] 连金玲.气动式输电线路除冰机器人机械本体研究[D].青岛:山东科技大学,2012.
[5] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2008.
[6] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.
作者简介:
刘毅(1991-),男,汉族,山东德州人,硕士,山东科技大学机械电子工程学院,机械制造及其自动化专业;
杜燕飞(1994-),男,汉族,山东菏泽人,本科,山东科技大学机械电子工程学院,过程装备与控制工程专业;
孙汉文(1995-),男,汉族,山东栖霞人,本科,山东科技大学机械电子工程学院,过程装备与控制工程专业;
刘志春(1996-),男,汉族,山东滕州人,本科,山东科技大学机械电子工程学院,机械电子工程专业。
猜你喜欢
小哥白尼(趣味科学)(2022年4期)2022-06-30
娃娃乐园·综合智能(2022年6期)2022-06-17
趣味(数学)(2021年6期)2021-11-06
疯狂英语·新读写(2021年8期)2021-11-05
少先队活动(2021年5期)2021-07-22
金桥(2019年10期)2019-08-13
大社会(2016年3期)2016-05-04
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
