
新型非机动车间隙插空模型研究
2017-05-30 21:44樊少锋
科技尚品 2017年2期
樊少锋


摘 要:通过引入Logit模型来描述新型非机动车流中车辆间隙插空行为,建立消除车道概念的自主性间隙插空模型,采用检测手段获得车辆运行轨迹数据,并用极大似然估计法对构建的间隙插空模型进行了标定。最后编写仿真程序验证该模型的有效性。
关键词:Logit模型;间隙插空模型;仿真
非机动车交通一直是我国城市交通系统的重要组成部分,近年来电动自行车的飞速发展,改变了原来以自行车为主体的非机动车交通体系,形成了电动自行车和自行车混合行驶的新型非机动车流。由于电动车日常行驶速度与自行车速度相差显著,高速车辆为接近其期望速度运行,总是寻找更舒适自由的间隙,并向该间隙运动。为了准确描述间隙插空行为,重点考虑驾驶员特征和目标车到间隙的距离等因素对间隙插空的影响。本文研究了消除车道概念上的车道变换行为即间隙插孔行为。
目前,国内外对于非机动车换道模型的研究主要是由机动车发展而来,且大部分是基于虚拟车道概念的,未能贴切的描述车辆实际运行状态。典型的矢量场模型描述的是消除虚拟车道概念下的车辆受到周围各车辆作用力的情况而产生的运动,是一种被动的横向运动。而实际情况中,非机动车辆本身具有间隙插空的意图,会主动选择更舒适自由间隙。机动车运动模型中基于随机效用理论的自主性车道变换模型较好的反应了车道变换是驾驶员在不同车道行驶状态下满意程度的选择结果,因此本文借鉴该模型在机动车换道行为中的应用,结合非机动车无车道划分的特性将目标车到间隙的距离、间隙本身的特性作为效益函数变量。通过利用Logit模型构建间隙插空运动模型。
1 模型构建
1.1 建模思路
实际发现,非机动车插空行为是经过驾驶员严格判断后才会产生的,具有很大的随机性,并不是所有的间隙都会使车辆产生插空行为。本文用随机效用理论来描述这一随机现象,规定目标间隙为效用最大的间隙,即驾驶员的最佳选择。驾驶员将左侧间隙效用U1,右侧U2,本间隙效用U0三者进行对比,当存在除了目前所行驶间隙以外其他间隙的效用大于本间隙时,即选择其他间隙的概率大于0.5时,间隙插空需求产生。本文构建判断性间隙插空模型思路如图1所示:
1.2 判断性间隙插空模型构建
1.2.1 意图产生解析
由判断性间隙插空行为的随机性可知其需求产生的过程受很多因素的影响,如人的驾驶倾向性、不同间隙的舒适程度以及当前运行状态的自由性等。该选择性插空行为不同于强制性插空行为,车辆不进行插空行为也能完成其行驶任务,即插空行为由驾驶员判断是否执行。研究认为,车辆习惯性对相邻的间隙或者较大的次邻间隙的驾驶满意程度进行评价,并对可提供的满意间隙环境进行选择。
由上可知,非机动车的插空行为具有二项选择特性。非机动车在行驶时随着时间地点的变化车辆可选择的插空间隙也在不断变化,驾驶员时刻对自身所在位置间隙和可插空间隙进行满意度评价并做出选择。对特定时刻出现的可插空间隙,驾驶员只有接受或拒绝该间隙两种选择。本文拟采用二项Logit的概率选择模型来描述非机动车的这一特征。
1.2.2 选取效用函数变量
本文选取前后车速度差、前后车车头间距和目标车到空隙的距离三者之间的复杂的向量函数来表达目标车在各个间隙行驶时的效用值。
特征变量Xin决定了间隙插空的概率,是模型构建的关键。由于非机动车的插空行为与机动车的换道类似,本文借鉴机动车车道效用的确定方法选择龙小强的相对速度、间距及车辆类型作为特征变量,与此同时由于自行车和电动自行车作为新型非机动车流的主体,车辆类型对间隙效用作用不明显,故剔除该变量。实际观测得知目标车距离间隙的远近直接影响到非机动车驾驶员的插空行为,因此目标车到间隙的距离影响着车道效用,选择目标车到间隙的距离这一参数作为效用函数的变量。
通过上述选择的3个特征变量来表示间隙的效用大小,设非机动车本间隙、相邻间隙特性都不完全相同,若左右两侧存在间隙效用大于目前所行驶的间隙效用时,车辆会选择效用较大的间隙,插空需求产生。本文线性效用函数如公式1所示:
其中:
θ0——常数项;θ1,θ2,θ3——分别为与特征变量相对应的未知参数;——目标车与前车的相对速度;——目标车与前车的车头间距;Lin——目标车到间隙的距离i=1,2;i=1表示目标车在本间隙行驶;i=2表示目标车在其他间隙行驶;此处假定目标车到本间隙的距离为0m。
2 模型参数标定及验证
2.1 模型参数标定
模型样本采用距交叉口约100m处的非机动车道上高峰小时交通俯拍数据,该时段非机动车流量大,电动自行车和自行車之间相互作用比较明显,各种车辆期望速度体现较好,插空现象频繁出现,样本效果贴近真实情况。
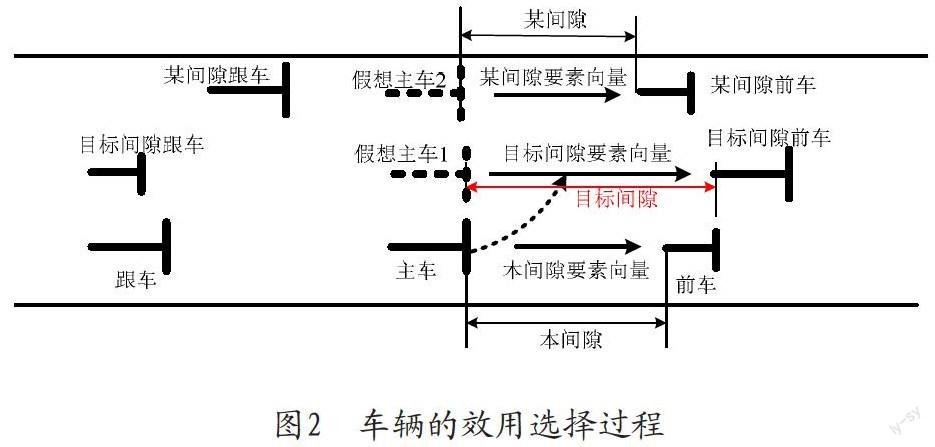
采取的样本应均是车辆进行选择性间隙插空行为,而由于外界环境须进行强制性插空的样本应剔除掉。令目标车与前车的相对速度ΔV、目标车与前车的车头间距ΔS,以及目标车与间隙之间的距离L,三者做为影响间隙效用的依据,令ΔV1为本间隙前后车相对速度,ΔV2为可插空间隙前后车相对速度,L1为目标车与本间隙之间的距离,L1在本文中取0,L2为目标车与可插空间隙之间的距离;同理,捕获车辆在本间隙正常行驶时刻且附近有可插入间隙时车辆数据,ΔV、ΔS、及L三参数作为该样本中目标车选择本间隙状态下的本间隙与邻间隙的效用依据。对于非机动车而言,可能存在多个对目标车有吸引作用的间隙如图2所示,实际车辆会选择效用最大的间隙为目标间隙,图2为车辆效用判断的过程示意图:
应用视频检测手段获取原始数据,根据样本提取原则,运用手工处理工具提取样本并初步获得车辆运行轨迹数据,将数据分类汇总后,利用Spss对模型参数进行极大似然估计。
已知大量的车辆间隙插空选择结果,令选择结果中是否进行间隙插空(不插空记为0,插空记为1)作为被解释变量,速度差、车头间距差、目标车到间隙的距离之差作为解释变量。根据参数估计结果可得间隙总效用函数为:
理论上驾驶员n在由本间隙i选择间隙j进行插空的概率为:
当Pjn大于0.5时,则产生间隙插空的需求,若计算得左右间隙Pjn均大于0.5,则将左右可插空间隙的Pjn进行比较,选择效用大的间隙进行插空。若两侧可插空间隙Pjn相等,且同时大于本间隙效用,此时由驾驶员喜好来定。
2.2 模型验证
采用面向对象的建模方法,在类库的基础上进行建模,拟开发出一个适合于非机动车流间隙插空行为的交通仿真系统。
当车辆存在可插空间隙时,根据间隙插空模型公式,驾驶员选择效用最大的间隙进行插空,如果原间隙的效用最高,则保持在原间隙行驶不插空,反之将向左或者向右插空。如图3所示:
3 结论
用随机效用理论描述间隙插空需求的产生,建立了基于效用选择的判断性间隙插空模型。该模型消除了车道概念,同时在构建效用函数时将间隙与目标车的距离考虑在内,将目标间隙本身特性同外界环境共同构成效用函数因素,采用极大似然估计法对构建的判断性间隙插空模型进行了标定,分析相关参数值,验证了模型的可行性。研究结果可为非机动车的微观仿真研究提供相关参考。能贴切反映新情况下的非机动车运行状态。
参考文献
[1]刘运通,石建军,熊辉.交通系统仿真技术[M].北京:人民交通出版社,2002.
[2]王华东.一种新的交通流矢量场微观模型[J].中国公路学报,2003,16(2):99-102.
[3]龙小强,谭云龙.微观仿真自主性车道变换模型[J].公路交通科技,2011,29(11):115-119.
[4]郑弘.道路交织区仿真模型研究[D].北京工业大学,2001.
[5]金安.Logit模型参数估计方法研究[J].交通运输系统工程与信息,2004,4(1):71-76.
(作者单位:天津铁道职业技术学院)
猜你喜欢
商业经济研究(2016年22期)2016-12-27
商场现代化(2016年26期)2016-11-21
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
商场现代化(2016年16期)2016-07-02
中国市场(2016年20期)2016-06-12
企业导报(2016年6期)2016-04-21
