ATS系统与三维视景仿真系统的结合技术研究
2017-06-01 11:29张代胜蒋鹏陈荣武王坚强
大连交通大学学报 2017年3期
张代胜,蒋鹏,陈荣武,王坚强
(1.西南交通大学 信息科学与技术学院,四川 成都 611756; 2.中国中铁二院工程集团有限责任公司,四川 成都 610031)*
ATS系统与三维视景仿真系统的结合技术研究
张代胜1,蒋鹏1,陈荣武1,王坚强2
(1.西南交通大学 信息科学与技术学院,四川 成都 611756; 2.中国中铁二院工程集团有限责任公司,四川 成都 610031)*
以郑州地铁一号线为背景,提出了基于MSTS平台的三维视景仿真系统与地铁ATS系统的结合技术方案.介绍了三维视景的建模过程,设计了用于控制对象的数据协议,利用MFC开发了用于系统间数据处理及传送的接口服务器.测试结果表明,提出的结合技术方案具有良好的可行性,满足基于三维视景的仿真系统的各项性能指标.为后续各项列控仿真子系统的研究,提供了新思想和技术方案参考.
ATS;视景仿真;MSTS;接口
0 引言
三维视景仿真技术是计算机技术的重要分支,是计算机技术、图形图像处理技术、多媒体技术、信息合成技术以及显示技术等诸多高新技术的综合运用[1].我国在上个世纪80年代末90年代初将三维视景仿真技术应用于城轨仿真中,主要是为司机培训提供一种模拟驾驶平台.在该平台的三维视景通过地铁列车运行时从司机室实景拍摄得到,叠加关键技术生成的系统.比较有代表性的系统有:上海同济大学开发的北京地铁二号线司机培训系统[2].黄友能[3]着重从场景模型的生成、动态场景的控制、视点变换、人物仿真等几个方面研究了虚拟仿真技术与地铁运行仿真系统的结合.ATS(Automatic Train Supervision)系统作为列车控制系统的重要子系统,主要负责列车运行状态的监测和运行图的调整.李廷朵[4]设计了ATS仿真系统,模拟了CBTC 列车运行.张太花[5]仿真实现了ATS系统中列车识别、车次号追踪、车次号操作等列车追踪功能.车爽[6]利用Creator/Vega工具仅仅从列车运行的角度将三维视景仿真系统和ATS系统结合到一起.目前关于地铁三维视景仿真技术和ATS系统的文章比较多,但真正从调度和列车运行的角度将三维视景仿真系统和ATS系统结合的文章相对较少.随着工业4.0的提出,虚拟现实结合技术倍受关注,通过虚拟-实体系统,构建智能工厂,实现智能制造的目的[7],可见将虚拟技术应用到其它系统中的结合技术着实具有重要的研究意义.
本文以郑州地铁一号线为背景,提出了一种基于微软MSTS(Microsoft Train Simulator)平台的三维视景系统与ATS系统的结合技术,从而搭建管控一体化的综合化仿真平台(以下简称“综合仿真平台”).利用此仿真平台,列车司机可在完全安全且逼真的虚拟环境中进行培训;地铁线路设计人员可得到各种参考数据;地铁调度培训人员可以看到现场设备动作过程及状态.同时,也可为有需求的客户提供系统性展示
1 三维视景仿真系统的建模
本文以郑州地铁一号线的线路数据为基础,利用微软公司开发的MSTS平台对列车三维视景场景建立模型.同时依托于微软提供的MSTS引擎,在VS2013平台上利用C#语言对模型进行驱动,实现用程序去操纵视景中的对象.由于MSTS平台具有强大的图像处理能力和批量布景功能,因此基于MSTS的建模方法相对于传统的CAD、Creator/Vega技术以及拍摄实景的建模方法,有效地提高了建模的效率和质量.其中三维视景场景主要包括:列车、隧道、信号机、轨道及其它建筑等[6].该部分是项目小组其他成员的主要任务,因此不作过多陈述.
2 综合仿真平台系统框架设计
在综合仿真平台中,ATS系统采用西南交通大学轨道交通信息及控制实验室现有的郑州地铁一号线的ATS系统.开发接口服务器作为ATS系统与三维视景仿真系统之间的数据处理和数据通信的枢纽.整个系统由四大功能组成:调度指挥功能、列控接口功能、控制对象响应功能和大屏显示功能.TOD系统与三维视景列车非直接连接,而是将TOD系统连接到接口服务器中的车载控制器模块(TOD显示功能不在本文重点研究范畴,不予过多陈述).各部分作用如下:
(1)调度指挥系统:下达调度命令,同时监控列车运行及设备工作状态;
(2)列控接口:处理ATS下达的调度命令,并向TOD和三维仿真系统发送相关信息;
(3)控制对象:模拟列车驾驶与TOD显示功能;
(4)大屏显示:显示ATS站场图和三维视景列车运行场景(包括ATS调度工作站的视景定位).
3 综合仿真平台数据协议设计
3.1 数据传输过程
三维视景仿真系统和ATS系统结合的各子功能具体包括:加车、单独操纵道岔、进路办理、取消进路、视景定位等.现以设置进路为例说明数据的传输过程:
(1)ATS调度工作站下达进路办理命令通过ATS服务器至接口服务器;
(2)接口服务器处理命令并向三维仿真系统发送命令;
(3)三维系统控制进路上的视景道岔动作到相应位置,同时信号机显示与进路相对应的信号显示.
3.2 数据协议设计
如图1所示.设定了数据收发双方的数据协议,收发双方必须按照协议指定格式发送命令或者数据消息.现以单独操纵道岔P0106到定位为例说明数据协议的具体含义及解析过程.ATS调度工作站通过菜单操纵下达进路操纵命令:SWIP01060,接口服务器接收到命令数据后,通过查表处理将道岔名称解析为三维仿真系统中的道岔序号,并形成新的命令数据(SWI0530)发送给三维视景仿真系统.三维仿真系统的MSTS系统接收到数据后,根据SWI标识确定是对道岔进行单独操纵,根据编号053找到对应的道岔,最后根据数据命令末位0,判断道岔定反位状态并使道岔动作到定位.

功能发送中转接口接收数据内容备注加车发送请求ATS加车响应三维进路办理/取消进路ATS接口服务器三维REQ_ADDATS10120010110车次号+点序号+速度三维道岔SWI+编号+定反位状态0:定位;1:反位信号机SIG+编号+灯色状态0/1:红色2:黄色;3:绿色单独操纵道岔ATS视景定位功能信号机道岔列车ATS接口服务器三维SWI+编号+定反位状态0:定位;1:反位三维x+编号最佳视角d+编号最佳视角车次号+T1/T2/T3/T4 T1:驾驶室视角T2:对向视角T3:顺向视角T4:远景视角
图1 综合仿真平台数据协议
4 综合仿真平台软件设计及实现
接口服务器作为三维视景仿真系统和ATS系统的信息传输纽带,是综合仿真平台实现功能
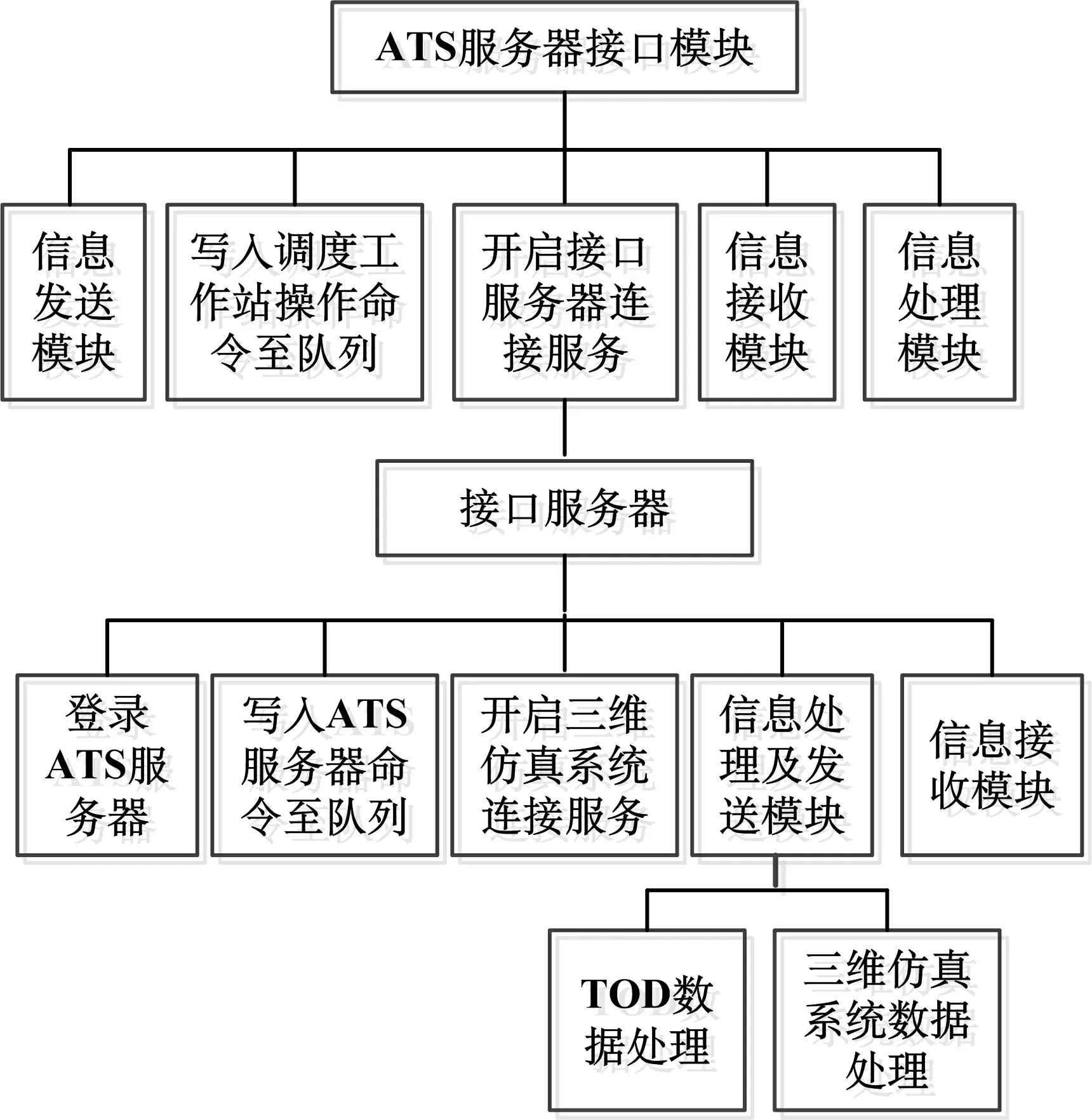
图2 接口服务器软件层次图
至关重要的一部分.本系统是在VC++6.0平台上,利用C++语言,采用MFC框架进行软件开发的.基于TCP/IP通信协议,利用套接字编程实现网络通信.软件层次图如图2所示.其中ATS服务器接口模块程序添加在原ATS系统中.三维视景仿真系统基于MSTS平台建模后,借助MSTS引擎在VS2013平台上利用CJHJ完成模型对象驱动功能.
4.1 加车功能
ATS系统的重要功能之一就是监测对列车的位置、运行速度及各类基础设备的状态[5].本系统的加车功能包括了列车的自动追踪功能.通过三维视景仿真列车实时发送列车的位置和速度数据至接口服务器,接口服务器转发给ATS系统 ,然后ATS系统按照数据协议对数据进行处理,转换为列车的位置、速度以及车次号数据,显示在调度工作界面上.列车追踪功能如图3所示.
图3 ATS系统(左)与三维视景仿真系统(右)的列车追踪功能结合
4.2 单独操纵道岔功能
道岔有两种操纵方式:一种是对道岔进行进路方式操纵,另一种是对道岔进行单独操纵[9].通过调度工作站下达道岔单独操纵命令,ATS服务器将命令写入消息队列,ATS发送数据模块将数据发送给接口服务器,接口服务器对数据处理并判断,然后发送给三维视景仿真系统.三维仿真系统根据接收到的命令(SWI+编号+定反位状态),将对应道岔动作到相应位置.道岔转换前的位置状态分别如图4、5所示.
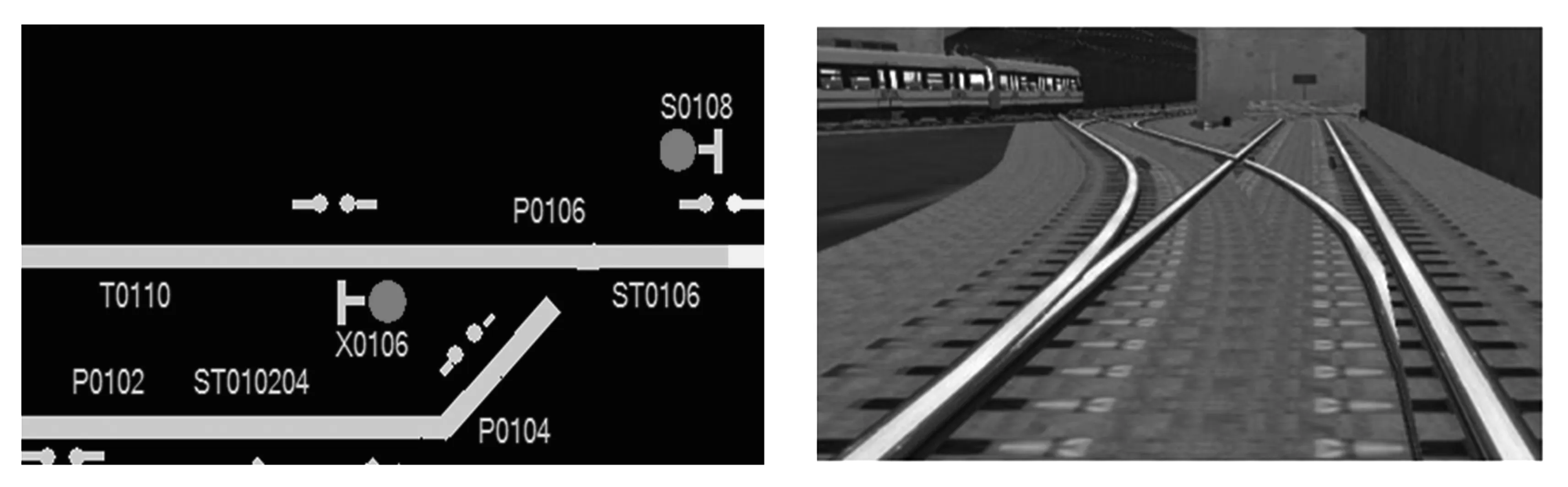
图4 单独操纵ATS系统道岔P0106到定位(左),三维视景仿真系统道岔P0106动作到定位(右)
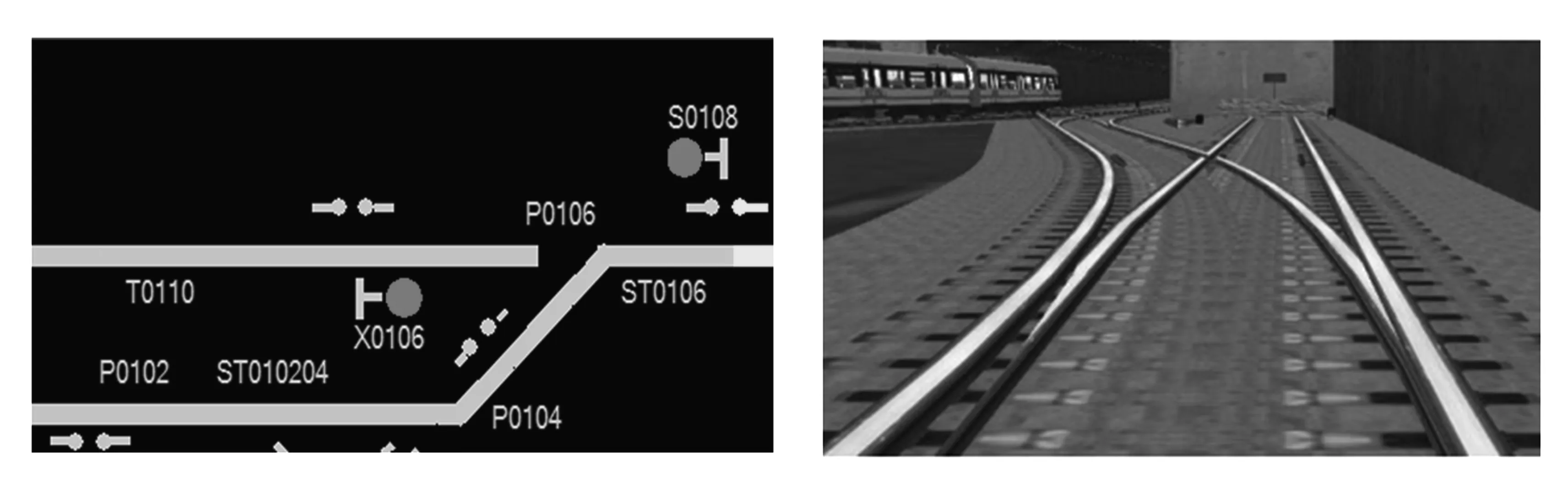
图5 单独操纵ATS系统道岔P0106到反位(左),三维视景仿真系统道岔P0106动作到反位(右)
4.3 办理进路功能/取消进路
为了保证行车安全,车站内信号、道岔、轨道电路等基本信号设备必须遵循一定的条件,按照一定的程序严格执行,这些条件和程序称为联锁.在进路排列之前,联锁系统会根据进路的操纵命令,对联锁关系进行判断,在无进路冲突的情况下才能排通进路,并向现场设备下达进路命令[9].本系统中,当在ATS调度工作站上进行办理进路(S0108至S0102)操作时,在满足联锁关系的前提下,通过接口服务器处理发送给三维视景仿真系统,系统接收到命令后,使进路上相关的道岔P0106动作到相应位置,并使信号机S0108和S0102显示正确的颜色.办理进路前后道岔和信号机状态分别如图6、7所示.取消进路功能与进路办理类似,只需要进路上给出正确的信号显示即可,这里不再赘述.

图6 进路办理前ATS系统显示(左),三维视景仿真系统动作(右)
图7 进路办理后ATS系统显示(左),三维视景仿真系统动作(右)
4.4 视景定位功能
通过调度工作站上的视景定位菜单,下达视景定位命令.三维系统接收到定位命令后,把对应的设备显示至大屏上.这就可以很好的将现场设备和ATS调度工作站上平面布置图的信号设备有机结合到了一起.
5 仿真系统测试及评价
验证一个基于三维视景的仿真系统性能的常用技术指标为实时性、可扩展性、显示速度、精确度以及操纵效率等[2,6].而本系统主要从两方面来评价其性能的优劣:一方面是ATS下达各调度命令,三维视景仿真系统能否快速执行命令,将相关设备动作到相应状态;另一方面是ATS调度工作站能及时更新列车的位置和速度等数据.
5.1 加车功能
根据列车运行计划,ATS系统通过菜单发送加车命令REQ_ADD,三维仿真系统接收到加车命令后驾驶员将列车从车辆段驶入CBTC区域,当ATS调度工作站接收到三维视景仿真系统发送的第一个点时,完成加车功能,并对列车进行自动追踪.
5.2 进路办理和进路取消
在ATS调度工作站上,通过菜单分别选择进路办理和进路取消命令,三维视景仿真系统能将道岔和信号机动作到相应的状态.
5.3 单独操纵道岔
在ATS调度工作站上,通过菜单分别下达单独操纵道岔到定位和反位的命令,三维视景仿真系统能完成道岔的定位和反位的动作过程.
5.4 视景定位
在ATS调度工作站上,通过菜单分别下达列车的驾驶室视角、对向视角、顺向视角和远景视角命令,三维仿真系统能完成列车相应视角位置的切换;在ATS调度工作站上,通过菜单下达某个信号机和某个道岔的视景定位命令,三维视景仿真系统将所选择的设备显示到大屏中央位置.
通过测试,本系统设计优点在于接口服务器能正确收发并处理相关数据,能满足ATS系统与三维仿真系统能实时传输数据,数据采集周期小于0.1 s,满足实时性的要求且系统性能相对稳定.由于本系统开发了接口服务器作为系统结合的纽带,可方便的再接入其它子系统,可扩展性好.同时,三维视景画面显示清晰,模型逼真,画面切换较为流畅.满足设计的功能需求,使两系统实现了成功的结合.但本系统的视景定位功能设计存在着不足之处:若先后两次定位的设备相隔太远(如前后视景定位的两个信号机分别位于一号车站和二十号车站),由于三维视景仿真系统中设备的切换过程中需要切换的数据量太大,导致视景定位功能切换存在2 s的时间延迟.本文下一步工作,针对视景定位功能,探索更好的实现方案.
6 结论
本文以郑州地铁一号线为背景,在MSTS平台实现了三维视景列车运行仿真系统的建模,结合功能需求,设计并实现接口服务器,将三维视景仿真系统和ATS系统有机结合到了一起.将三维视景仿真技术成功运用到了ATS系统中,形成了管控一体化的综合仿真平台.经过系统测试表明,本文的系统结合技术方案可行性好,可扩展性强.并能为相关培训人员提供操作平台及教学系统化展示平台.同时,也能为后续有关将三维视景仿真技术应用在其它列车控制系统中的研究提供技术参考.
[1]宋晓伟,唐涛.视景仿真技术在地铁列控系统中的应用[J].北京交通大学学报,2007(2):67- 71.
[2]杜霄,唐涛.地铁列车运行仿真系统中三维视景建模和简化[J].系统仿真学报,2006(6):1724- 1728.
[3]黄友能,唐涛,宋晓伟.虚拟仿真技术在地铁列车运行仿真系统中的研究[J].系统仿真学报,2008,12:3208- 3211.
[4]李廷朵,孔祥琦,宋欣,等.ATS系统模拟CBTC列车运行的设计[J].铁道通信信号,2013(S1):69- 70,74.
[5]张太花.ATS列车追踪的设计与实现[D].成都:西南交通大学,2013.
[6]车爽.基于列车运行控制的城市轨道交通视景仿真[D].成都:西南交通大学,2015.
[7]丁纯,李君扬.德国“工业4.0”:内容、动因与前景及其启示[J].德国研究,2014(4):49- 66+126.
[8]陈荣武.CBTC系统列车运行仿真与优化策略[D].成都:西南交通大学,2011.
[9]杨扬.车站信号控制系统[M].成都:西南交通大学出版社,2012.
[10]IEEE Std 1474.3- 2008.IEEE Recommended Practice for Communications-Based Train Control (CBTC) System Design and Functional Allocations[S].IEEE vehicular Technology Society.The Institute of Electronics Engineers,Inc.,2008.
[11]杨林.地铁列车运行仿真系统三维建模的研究与实现[D].成都:西南交通大学,2015.
[12]陈尔超.城市轨道交通调度与控制一体化方法的研究[D].北京:北京交通大学,2015.
[13]李铮.基于CBTC的ATS系统与外系统接口模块的设计与实现[D].北京:中国铁道科学研究院,2014.
[14]MULTIGEN-PARADIGM. Vega LynX User’s Guide[M].San Jose,CA:MultiGen-Paradigm,2001.
[15]BADLER N.Virtual humans for animation,ergonomics,and simulation[J].IEEE Workshop on Non-Rigid and Articulated Motion,Puerto Rico,1997(6):28- 36.
Research on Combination Technology of ATS and 3D Visual Simulation System
ZHANG Daisheng1,JIANG Peng1,CHEN Rongwu1,WANG Jianqiang2
(1.School of Information Science & Technology,Southwest Jiaotong University,Chengdu 611756,China; 2.China Railway Eryuan Engineering Group Co.,Ltd,Chengdu 610031,China)
Based on the background of Zhengzhou Metro Line 1,the technology plan of combination of 3D visual simulation system and Metro ATS simulation system based on MSTS platform is proposed.The modeling process of the 3D scene system is introduced,and the data protocol for controlling object is designed.The interface server is developed for data processing and transfer between systems by MFC.The test results show that the proposed scheme has a good feasibility and meets the performances of the simulation system based on 3D visual simulation system.The new ideas and technical scheme reference is provided for the follow-up study of the train control simulation subsystem.
ATS;visual simulation;MSTS;interface
1673- 9590(2017)03- 0106- 06
2016- 06- 04
四川省科技支撑计划资助项目(2014GZ0081)
张代胜(1991-),男,硕士研究生;陈荣武(1971-),男,高级工程师,博士,主要从事城市轨道交通控制方向研究E-mail:dszhang@my.swjtu.edu.cn.
A
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2016年8期)2016-06-01
中国铁道科学(2015年6期)2015-06-21
舰船科学技术(2015年8期)2015-02-27
凿岩机械气动工具(2014年3期)2014-03-01