
基于MATLAB/Simulink的鼠笼型异步电动机矢量控制研究
2017-06-01 11:39张腾达
电脑知识与技术 2017年8期
张腾达


摘要:长期以来,鼠笼型异步电动机由于结构简单、制造方便、运行可靠、造价低廉等优点,在恒速运行场合得到了广泛的应用。随着电力电子技术、微处理器及矢量控制理论在异步电机中的应用和发展,异步电动机的调速性能越来越接近甚至超过直流电动机。为了分析研究鼠笼型异步电动机特性,更好地理解和控制鼠笼型异步电动机,在MATLAB/Simulink的环境下,对鼠笼型异步电动机进行了建模,并且运用矢量控制策略进行了仿真实验。通过仿真实验,验证了鼠笼型异步电动机矢量控制策略的正确性。
关键词:笼型异步电动机;矢量控制;仿真
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2017)08-0219-04
1概述
直流电动机励磁分量和转矩分量能够实现独立控制,控制较简单,调速方便,虽然存在体积大,质量重等弊端,还是在需要频繁调速的系统中得到了广泛应用。异步电动机拥有结构简单、制造方便、运行可靠、造价低廉等优点,但其存在着高阶、非线性、强耦合特性,使得对其控制较复杂,故在很长一段时间,异步电动机在需恒速运行的场合得到了广泛应用。1971年德国学者Blaschke等人首先提出的矢量变换控制(Transvectorcontrol),实现了交流电动机的磁通和转矩独立控制,使得交流电动机变频调速系统具有了直流调速系统的特点。正是基于此,本文对笼型异步电机进行了矢量控制仿真研究,以达到对笼型异步电动机及矢量控制特性的深入理解。
2数学建模
将鼠笼型异步电动机转子侧参数归算到定子侧,可得出其数学模型如下:
根据数学模型,可得出笼型异步电机等效图如图1所示。
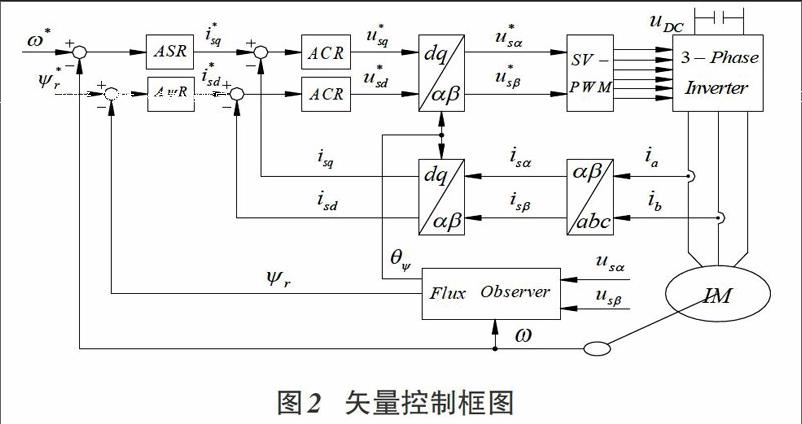
控制系统可分为转速(转矩)和磁链两个近似解耦的子系统,每个子系统均为双环控制结构,外环为转速和磁链控制环,内环为转矩电流和励磁电流控制环,如图2所示。转速指令ω*与实测的电动机转速ω的偏差经转速调节器ASR,得到转矩电流指令i*sq;磁链指令ψ*r与磁链观测器得到的转子磁链偏差经磁链调节器AψR,得到励磁电流指令i*sd。ASR和AψR均为PI调节器。根据观测所得的转子磁链角度,实测的定子三相电流经坐标变换后可得转矩电流isq和励磁电流isd,它们与其指令电流的偏差经电流调节器ACR后分别可得dq轴电压指令u*sq和u*sd,再经坐标变换为静止坐标系下的电压指令,最后经PWM模块得到控制脉冲。ACR通常也采用PI调节器,但因d轴和q轴电流仍然存在耦合项,工程中常在电压指令中引入解耦项,与电流环PI调节器的输出相加即为ACR输出u*sd和u*sq。
3矢量控制仿真模型
在MATLAB/Simulink环境下,搭建笼型异步电动机矢量控制仿真如图3所示。
通过图3可以看出,笼型异步电动机矢量控制主要由直流电源模块、矢量控制模块、笼型电动机和PWM发生器模块四部分组成。以下对各模块进行详细建模分析。
3.1直流电源模块
三相交流电压源经三相桥不控整流输出直流电压,如图4所示。其中Uab=380V。
3.2矢量控制模块
矢量控制模块如图5所示。主要由速度控制,角度计算,坐标变换,PWM产生等模块组成。
3.2.1转速控制子模块
此模块的主要功能是将给定转速与实际转速相比较,通过PI调节器得出给定转速。
仿真模型建立及封装图如图6所示。
3.2.2转子磁链角计算子模块
此模块用于转子磁链角度的计算。其中:
仿真模型及封装如图7所示。
3.2.3 abc/dq坐标变换子模块
根据定子电流在三相静止坐标系abc下的分量,经过同步旋转坐标变换,得出电动机定子电流在dq坐标系下的转矩分量和励磁分量。其仿真模型及封装如图8所示。
3.2.4励磁电流给定i*d子模块
此模块的作用是根据转子磁链给定值ψ*来计算定子电流的励磁分量给定值i*d。其中,
i*d=ψ*r/Lm (6)
其仿真模型及封装如图9所示。电动机互感参数选定为34.7mH。
3.2.5转矩电流给定i*q子模块
此模块的作用是计算定子电流在dq坐标系下的q轴分量给定值iq*。其中,
(7)
其仿真模型及封装如图10所示。选择电动机为2对极,转子电感为35.5mH。
3.2.6磁链计算子模块
此模块的作用是通过定子电流励磁分量id计算转子磁链ψr。其中,
(8)
Tr为转子时间常数。其仿真模型及封装如图11所示。转子电阻取0.228Ω,则时间常数Tr=0.1557s。
3.2.7dq/abc坐标变换子模块
此模块是根据定子电流在幽坐标系下的分量,经过同步旋转坐标变换得出电动机定子三相绕组电流的给定值iabc,其仿真模型及封装如图,2所示。
3.2.8电流比较脉冲产生环节
电流比较脉冲产生环节是把矢量控制环节输出的三相电流与反馈电流进行比较,产生6脉冲信号输出,用于控制全桥逆变器。考虑到仿真速度及精度,本例的滞环宽度设为20。其仿真模型及封装如图13所示。
3.3笼型电动机
从MATLAB/Simulink器件模块库里选取笼型电动机。电动机及其参数设置如图14所示。
3.4整流桥模块
从MATLAB/Simulink器件模块库中选取整流桥模块,其参数设置如图15所示。
4仿真結果
电动机空载起动,初始速度为120 rad/s,0.1s后速度增至150rad/s,0.3s时,负载转矩增至200N·m。仿真结果如图16所示。
通过图16可以看出,电动机以300N.m的恒转矩起动,经过0.05s左右,达到设定转速,之后转矩降为0。电动机定子侧只剩下励磁电流及很小的克服摩擦等的转矩电流,所以定子电流很小。0.1s时转速突增,转矩随之增大,达到预定转速,转矩又降为0。当负载转矩增大时,转速随之下降,由于闭环作用,转速逐渐恢复至设定值。通过整个仿真过程可以看出,该系统具有较好的抗扰动性能及良好的跟随性。
5结语
通过鼠笼型异步电动机矢量控制仿真实验结果,验证了理论分析与仿真平台搭建的正确性。同时可以得出矢量控制异步电动机是一种较为简单、有效的控制方法,达到了类似于直流调速所具备的高性能。
猜你喜欢
科技资讯(2016年18期)2016-11-15
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技资讯(2015年19期)2015-10-09
