
基于黄金分割遗传算法的VISSIM仿真模型参数校正
2017-06-19 19:15杨文臣胡澄宇
华东交通大学学报 2017年3期
杨文臣,张 轮,王 铮,胡澄宇
(1.云南省交通规划设计研究院陆地交通气象灾害防治技术国家工程实验室,云南 昆明 650031;2.同济大学道路与交通工程教育部重点实验室,上海 201804)
基于黄金分割遗传算法的VISSIM仿真模型参数校正
杨文臣1,2,张 轮2,王 铮2,胡澄宇1
(1.云南省交通规划设计研究院陆地交通气象灾害防治技术国家工程实验室,云南 昆明 650031;2.同济大学道路与交通工程教育部重点实验室,上海 201804)
微观交通仿真模型的准度直接决定所模拟交通场景的真实性。提出一种黄金分割遗传算法的VISSIM仿真模型参数校正方法。首先,详细梳理了VISSIM仿真的标准作业流程及模型参数的校正原理;接着,设计了以通过量为指标的目标函数和仿真参数个体的离散化方法;然后,采用黄金分割遗传算法具体设计了VISSIM模型参数的校正方法;最后,以典型城市信控路口为例,分析参数校正后的仿真模型特性,并采用实测路口转向流量数据验证所提出参数校正算法的效用。
微观交通仿真;参数校正;黄金分割遗传算法;参数离散;VISSIM
微观交通仿真软件能对单一车辆行驶行为进行微观处理,模拟、分析和评价实际道路上交通流的运行,是交通系统管理与控制的重要实验工具[1]。作为一种无偏的可视化评价工具,VISSIM、PARAMICS、CORSIM等仿真软件现已广泛应用于交通流特性分析、交通控制方法验证、交通设计方案评价、驾驶行为分析等智能交通领域的应用研究[2-3]。然而,当前主流交通仿真软件的默认模型参数均源自国外交通流状况的标定结果,这往往与我国城市道路的现实交通流特征不符。为确保交通仿真结果的可信度,必须采用实际数据标定仿真模型的参数,以建立精细化的仿真模型[4-5]。
仿真参数校正实质上是一个离散数据寻优的过程,遗传算法模拟生物自然进化过程,从问题解的种群开始全局搜索,现已被广泛应用于仿真模型参数校正。CHEU等构建了一个快速路系统FRESIM模型,并最早将遗传算法应用于仿真参数校正[6]。LEE等以交通流量及占有率为指标,采用遗传算法校正PARAMICS模型的车头时距与平均反应时间[7]。PARK等采用阶段式的校正策略提出一种基于遗传算法的参数校正流程,并在CORSIM、PARAMICS与VISSIM中进行了验证[8]。李志明等选取VISSIM的6项模型参数,以进口道延误为指标,采用遗传算法校正仿真参数[9]。孙剑等以行程时间和流量为指标,采用遗传模拟退火启发式算法对8类VISSIM仿真模型进行参数校正[10]。周素霞以路网车辆总数为评价指标,采用遗传算法对2类VISSIM仿真模型参数校正[11]。唐少虎等以进口排队长度为目标,采用人工萤火虫算法校正了7类VISSIM仿真模型参数[12]。众多学者已将遗传算法应用于仿真模型参数校准问题,并已在校准流程、算法设计、实验验证等方面积累了较好的基础。然而,既有研究多数缺乏VISSIM仿真参数校正机制及校正参数物理意义的详细解析,且多数参数校正的研究考虑Wiedemann跟车模型参数,而较少系统地考虑跟驰、换道参数;同时,简单遗传算法容易陷入局部最优,虽然采用启发式的混合群体智能算法能增强遗传算法局部优化能力,但这类算法局部寻优计算相对复杂,较大限制了参数优化效率。
本文系统解析VISSIM模型参数校正的机理及模型参数的选取,并以实测路口流量数据为基准定义评标目标函数,引入黄金分割算子进行局部寻优,设计了基于黄金分割遗传算法的VISSIM模型校正流程[9]。以典型城市信控路口为例,对比分析实测/仿真转向流量数据,以及校准前/后平均停车间距等9个仿真模型参数,验证提出算法的效用。
1 VISSIM仿真模型校正
1.1 交通仿真标准作业流程
微观仿真应用的标准作业流程如图1所示,包括3部分:交通基础路网建模、交通流建模和智能交通仿真应用。基础路网建模对基础路网几何设施和交通控制设施等进行可视化建模,配置路网OD和统计分析参数等。交通流建模通过仿真模型参数的校准实现,旨在使仿真模型最大程度地逼近现实道路交通流的运行状况。为有效支持交通运营分析,智能交通仿真应用针对交通设计、管理与控制等应用问题展开具体评价、验证及优化。可见,交通仿真软件的建模精度直接决定着仿真结果的可信度。但是,实际工作中的许多交通仿真应用并不重视仿真模型参数校准。
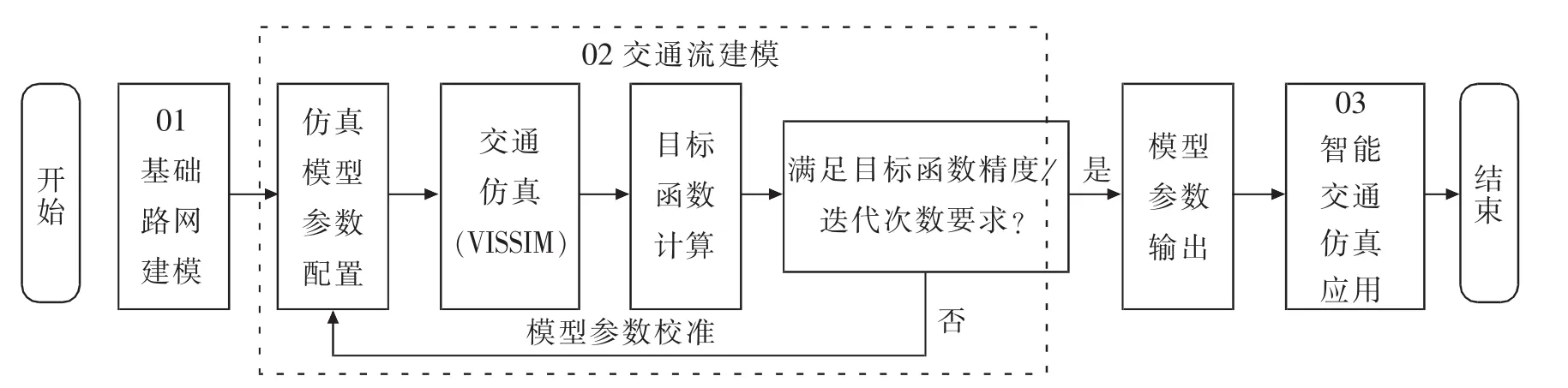
图1 微观交通仿真应用的标准流程Fig.1 Genetic process of microscopic traffic simulation application
1.2 参数校正机制
VISSIM交通仿真的交互机制如图2所示,包括3部分:用户、输入/输出接口、VISSIM仿真软件[13]。用户负责基础路网的可视化建模和交通控制程序的二次开发;在用户配置好交通控制环境后,控制程序作为外部程序独立运行,采用输出接口检测交通数据,并采用相应的算法优化控制方案,进而通过输入接口返还至VISSIM仿真软件。VISSIM仿真器负责道路交通场景的模拟、交通数据的采集和控制方案的执行。输入/输出接口负责VISSIM仿真器与控制程序之间的实时数据交互,共有3种接口的开放机制,包括COM组件式对象接口函数、原始模型文本读写 (VISSIM的.inp模型文件)、DLL动态链接库(数据交互)。
1.3 仿真模型参数
微观交通需校准显著影响路网通行能力、驾驶行为特征和车辆性能的参数。VISSIM城市道路模型是在Wiedemann 1974“生理-心理跟驰模型”的基础上演化形成的[13],开放的模型参数主要包括:跟驰行为、换道行为、优先规则、期望车速、加减速特性等5类。大量研究成果[1,4,8,12]表明,跟驰行为和车道变换是底层仿真模型的核心参数,必须进行校正;路网通行能力和车辆性能对优先规则、期望车速、加减速特性等对参数敏感,在进行场景的精细化建模时,需要正确配置。在信号控制路口,驾驶员严格按照信号灯色的有序通行,此时优先规则对通行能力的影响小,期望车速通常根据城市道路限速值采用“S”型速度分布进行标定。综上分析,从城市道路驾驶行为和通行能力的角度出发,研究对Wiedemann 1974底层模型及跟驰、换道模型的9个参数进行校正,各参数的说明如表1所示
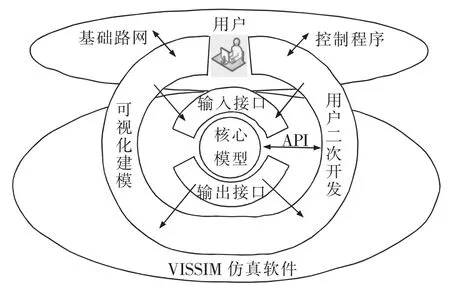
图2 VISSIM交通仿真的交互机制Fig.2 The mechanism of VISSIM simulation modeling
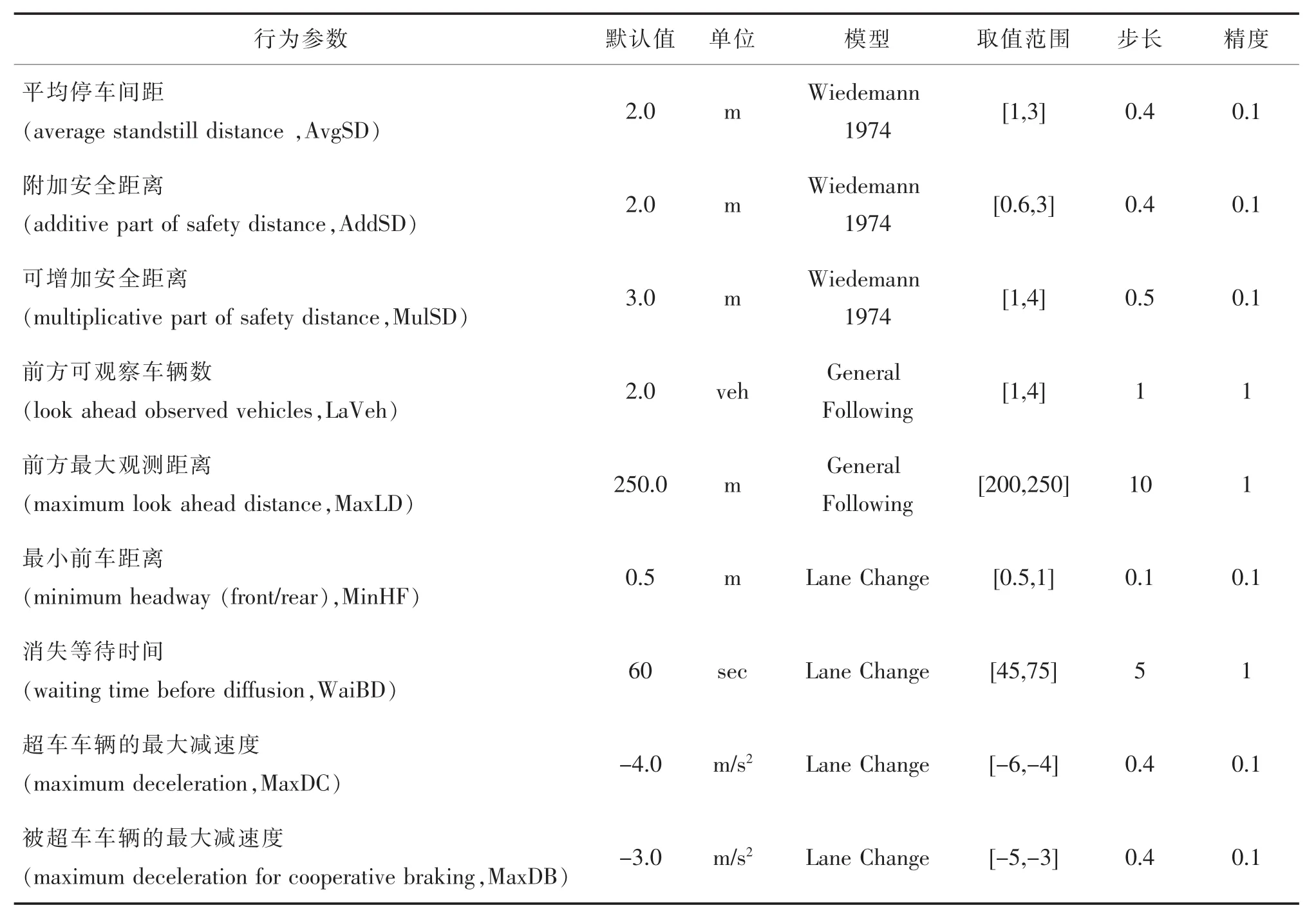
表1 城市道路VISSIM校正参数集及说明Tab.1 The VISSIM parameter set of urban road simulation model
表1中,平均停车间距、附加安全距离和可增加安全距离描述跟驰过程中两停车车辆的平均停车距离和安全距离。前后车辆间的最小前车距离是影响道路通行能力及排队长度的关键参数。前方可观察车辆数及前方最大观察距离决定驾驶员对环境的感知能力,可使驾驶员提早做出判断。前车/后车最大减速度影响车辆的换道行为。在交通流量较多或配时方案不合理的条件下,处于分流点而不能顺利换道的车辆显著影响路口通行能力,消除前的等待时间决定了车辆等待变换车道空挡的最长时间。
2 仿真模型校正的算法设计
2.1 目标函数设计
平均绝对相对误差(mean absolute percent error,MAPE)是衡量仿真效果准确性最重要的指标之一,直接反映整体的仿真准确性程度,MAPE的值越大,时段内的仿真误差就越大;反之,仿真误差就越小。以路口各流向通过车辆数的最佳匹配为目标,定义式(1)的MAPE函数来评价仿真模型的精度

式中:n为路口流向总数量,qir为断面实际通过流量,qis仿真断面通过流量。各流向的通过量采用布设在路口停前线前的线圈检测器进行采集。
2.2 黄金分割遗传算法
传统的遗传算法在求解时优化速度慢,且容易陷入局部最优,降低了寻优的速度与精度。对多约束的最优化问题,为克服遗传模拟退火等混合算法的计算量大等不足,研究引入黄金分割比例确定局部最优点的搜索位置。黄金分割遗传算法的具体描述和应用于交通控制问题的性能分析已在先前研究得到验证[14-15],其基本思想是:两个局部最优个体将趋同于解空间的同一个“凹处”,因而,在两个局部最优个体的基因之间,存在潜在的更优的基因位置。其局部寻优的计算原理如图3所示。A和B为两个相邻的最优个体,C和C′为通过黄金比例得到的潜在最优点的位置,AC和AB、C′C和C′B的关系满足黄金分割点定义。

图3 黄金分割局部最优点的计算示意Fig.3 The illustration of golden-ratio based local optimal sets
2.3 仿真模型参数的离散化
表1中平均停车间距等6个仿真模型参数是连续的数值,且各参数的值域不同,连续型参数组合构成的取值空间在理论上是无限的。在数量有限的迭代次数内,巨大的取值空间将为最优模型参数的带来显著的不确定性,增加计算算杂度且容易限入局部最优。为降低群体搜索参数的复杂度,需对模型参数的数据进行离散化处理,以将大空间范围内的参数数值离散为数量有限的几个分级,原理如下:记模型参数i的值域为[li,ui],优化步长为△Si,则参数i的分级数量Mi=(ui-li)/△Si。研究采用模型参数的离散化取值生成初始种群,1个个体表征9个模型参数的1种可能组合。记参数i的离散化取值为k,k是整数且k∈[0,Mi],则参数i的第k个分级水平对应的实际参数值采用式(2)计算

2.4 算法校正步骤
基于黄金分割遗传算法 (golden-ratio genetic algorithm,GRGA)的VISSIM模型参数校正的流程如图4所示。整个过程采用GRGA进行参数群体的迭代寻优,对每一个可行的参数个体,在对应的交通仿真结束时计算其目标函数,以评价个体优劣。主要步骤如下:
步骤1:初始化。初始化遗传算法和黄金分割算法的控制参数,并采用实数编码生成初始种群PA和PB,其中,PA表示全局寻优种群,PB表示局部寻优种群,初始种群需满足个体间互不相同准则,并预先加入已有文献中的优秀个体。在算法参数中:进化代数Gen取100,PA种群规模Na取50,黄金分割寻优规模m取10,PB子种群规模Nb为2 m;MAPE的误差为ρ;交叉和变异概率随进化代数及适应度值自适应地动态调整[16]。
步骤2:VISSIM仿真及评价。对种群PA和PB中的新增参数个体,通过修改Vissim模型的.inp文件的参数,并采用COM接口调用VISSIM仿真函数运行一次仿真,在仿真结束时,根据统计的各流向转向流量,计算个体的目标函数,即适应度。
步骤3:算法终止的判断。如果适应度值满足收敛条件或迭代次数达到预设的最大值,输出最优的模型参数,反之进入下一步。
步骤4:采用Metropolis准则概率接受局部寻优种群PB的新个体,用接收的优秀个体依次替换种群PA最差的个体。
步骤5:局部寻优操作:为保持种群的多样性,在简单GA算法的每一新生代PA中,挑选最好的2 m个个体更新子种群PB,并从PB中随机选取m个优秀个体作为初始向量,调用黄金分割算子强化遗传算法(式1)的局部寻优搜索,更新局部寻优种群PB。
步骤6:遗传算子操作[16]:采用“选择、交叉和变异”算子全局优化种群PA,并转向步骤2。
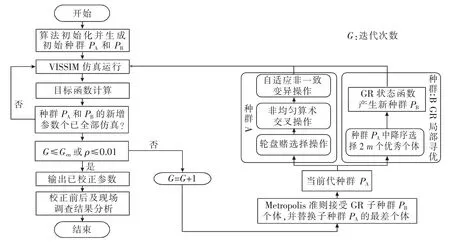
图4 基于GRGA算法的VISSIM参数校正流程Fig.4 The calibration framework of VISSIM parameter based on GRGA
3 实例验证
3.1 案例描述
选取深圳市某典型交叉口作为算法的验证对象。此路口南邻深圳市政府、北接北环大道,邻近路段限速60 km/h,是深圳市关键交叉路口,具有交通设计规范、交通流量大等特征。路口采用多时段定时控制方案。该路口基础路网、道路交通组织,以及标准四相位方案的VISSIM仿真模型如图5所示,交叉口进口引道拓宽,且右转交通渠化(不受信号灯控制);采用一个月内路口感应线圈在顺畅和拥挤状态下实测交通量的均值作为状态下交通需求OD,各流向的到达流量呈非均衡分布。
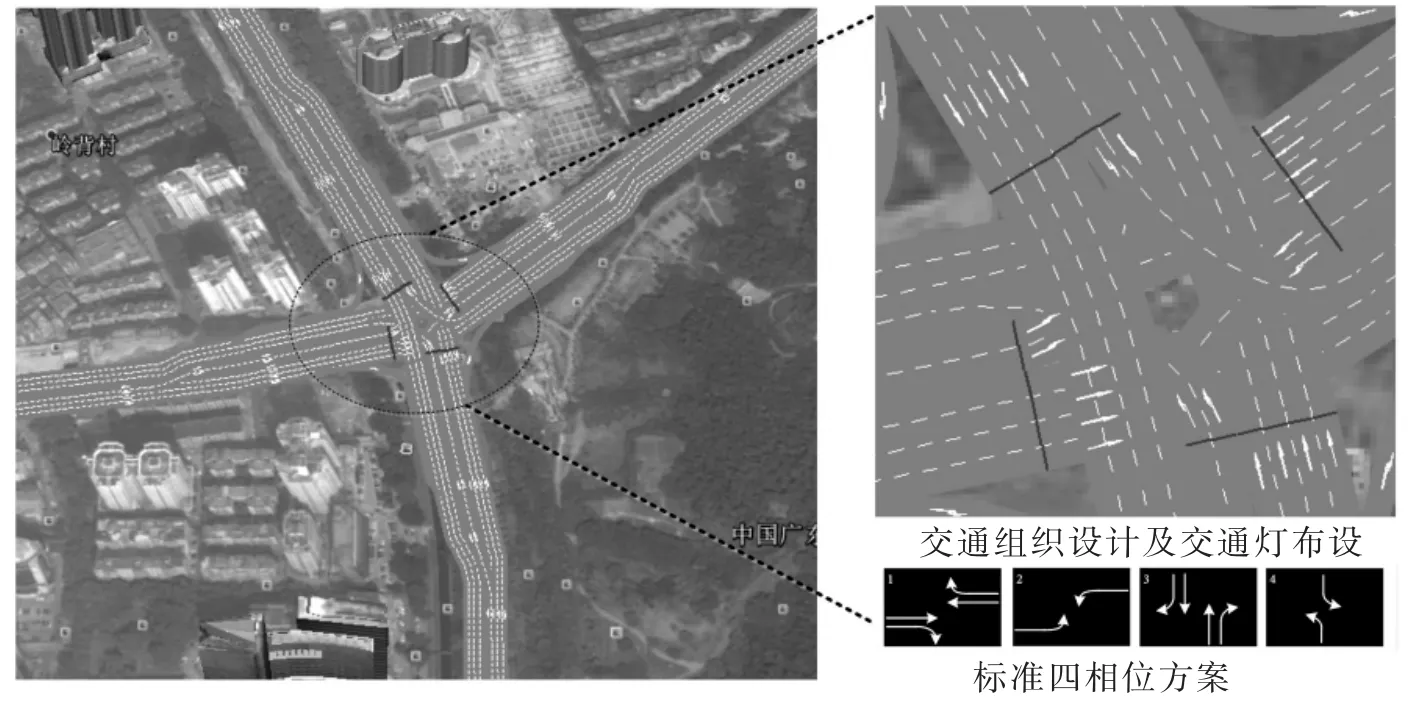
图5 深圳某典型信控路口VISSIM仿真模型Fig.5 The VISSIM simulation model of a signalized intersection in Shenzhen
3.2 实验设计
实现场景:①采用路口感应线圈在顺畅和拥堵两种状态下的实测车流量的均值作为状态的驶入流量(如表2示),仿真时长为2 h;② 为模拟路口短时交通流到达波动特性,根据线圈统计结果,在VISSIM的Routes文件中设置1 h内10 min间隔车辆的发车比例;③GRGA算法的每个个体决定每次仿真的9个模型参数。
实验平台:采用C#语言在Visual Studio 2010的.NET框架平台上实现VISSIM仿真参数校正系统。受限于VISSIM 4.30的仿真实验条件,研究采用文本读写的技术实现驾驶行为参数的校准,采用COM接口函数技术实现外部程序与VISSIM仿真交通数据和操作交互。
3.3 结果分析
1)校正后的模型参数。校正后的模型参数如表2所示。与表1默认的模型参数相比,平均停车间距(AvgSD)、附加安全距离(AddSD)、可增加安全距离(MulSD)减小达50%以上,消失等待时间(WaiBD)减小达25%,前方可观察车辆数(LaVeh)增加1倍,超车/被超车车辆的最大减速度(MaxDC、MaxDB)增加50%以上,最小前车距离(MinHF)稍有增加,而前方最大观测距离(MaxLD)不变。在校正后的参数中,AvgSD,AddSD以及MulSD三个值均明显小于默认值,这表明与国外默认驾驶行为相比,校调后的驾驶行为更倾向于冒险,这与当前我国驾驶员的普遍侵略性驾驶习惯相符。

表2 校正后的VISSIM模型参数Tab.2 The calibrated parameters of VISSIM simulation model
2)各转向小时交通量。模型参数校正前/后各转向流量与现场实测观测值的统计结果如表3所示。整体而言,仿真通过量均比实测通过量要小,这是因为研究以停车线前检测线圈采集的通过量作为仿真输入OD,有部分车辆仍在路段上离散行驶或在信控路口等待排队。

表3 参数校正前/后各转向的小时通过量Tab.3 The direction throughput before/after parameter calibration
在两种交通状态下,模型参数校正前/后各转向流量绝对误差的直观描述如图6示。在顺畅状态下,由于信控交叉口到达车流量较小,交通流干扰小,参数校正前/后驾驶行为的差异对各流向通过量的影响小,与校正前相比,校正后的MAPE减小了仅1.5%。在大流量的拥堵状态下,对默认的模型参数,进口道小时通过量明显失真,南进口直行流向的最大MAPE达17.9%;而校正后的结果与实测值相近,MAPE约为2.5%,与校正前相比,校正后的MAPE减小达16.5%,南进口直行的通过量显著增加了400多辆。这是因为实验路口各流向到达呈非均衡分布,交通强度最大的南进口左转和直行车辆间跟驰换道行为频繁,尤其在拥堵的交通条件下,受左转排队长度溢出专用展宽车道的影响,直行车辆因左转车辆的阻挡不能顺利通过,造成断面变化区域的交通中断,大幅减小了进口通过量。校正参数后,平均停车距离及附加安全距离的减小和前方可观察的车辆数增加使得仿真车流中车间距减小,而减小的消失等待时间明显降低溢出车辆的影响时间,这大幅提高了大流量进口的通过量。

图6 模型参数校正前(-)后(+)各转向流量绝对误差Fig.6 The absolute error of throughput before and after parameter calibration
4 结论
在系统梳理VISSIM交通仿真作业标准流程、参数校正机制和仿真模型参数的基础上,从减小混合遗传算法局部寻优计算量的角度出发,本文引入黄金分割遗传算法并设计了一种VISSIM仿真模型参数校正的算法,以典型城市信控路口为例,对仿真模型的9个参数进行校正。参数校正前/后仿真结果与实测数据的分析结果表明:采用黄金分割遗传算法校准后的仿真模型更能描述实际的交通情况,且VISSIM仿真参数对交通流的运行状况的影响在一定程度上与交通流的强度相关。这主要体现在中低流量的交通流条件下,不同行为参数间路口各流向通过量的差异不显著,但是,在中高流量条件下,因行为参数差异导致的交通运行状况的偏差很大,必须进行参数校准。
[1]邹智军.新一代交通仿真技术综述[J].系统仿真学报,2010,22(9):2037-2042.
[2]KOTUSEVSKI G,HAWICK K A.A review of traffic simulation software[J].Research Letter in the Information and Mathematical Science,2009(13):35-54.
[3]周溪召,许琰.车道宽度对信控交叉口通行能力及车辆延误影响研究[J].华东交通大学学报,2016,33(6):38-42.
[4]SUN D J,ZHANG L,CHEN F.Comparative study on simulation performances of CORSIM and VISSIM for urban street network [J].Simulation Modelling Practice and Theory,2013(37):18-29.
[5]何兆成,佘锡伟,杨文臣,等.结合Q学习和模糊逻辑的单路口交通信号自学习控制方法[J].计算机应用研究,2011,28(1):199-202.
[6]CHEU R L,JIN X,NG K C,et al.Calibration of FRESIM for Singapore expressway using genetic algorithm[J].Journal of Transportation Engineering,1998,124(6):526-535.
[7]LEE D,XU Y,CHANDRASEKHAR P.Parameter calibration for PARAMICS using genetic algorithm[C]//The 80th Transportation Research Board Annual Meeting,Washington D.C.,2001.
[8]PRAK B,QI H.Development and evaluation of simulation model calibration procedure[C]//The 84th Transportation Research Board Annual Meeting,Washington D.C,2005.
[9]李志明,闫小勇.基于遗传算法的交通仿真模型参数校正方法研究[J].交通标准化,2006(4):21-23.
[10]孙剑,杨晓光,刘好德.微观交通仿真系统参数校正研究[J].系统仿真学报,2007,19(1):48-50.
[11]周素霞,陈森发.基于遗传算法的VISSIM参数校正及其交通流应用[J].交通科技,2009(2):89-91.
[12]唐少虎,刘小明.基于IAGSO算法的VISSIM模型校正研究与实现[J].交通运输系统工程与信息,2014,14(5):74-80.
[13]PTV.VISSIM 5.4 User Manual[Z].PTV Planung Transport Verkehr AG,2012.
[14]杨文臣,张轮,饶倩,等.基于黄金分割点遗传算法的交通信号多目标优化[J].交通运输系统工程与信息,2013,13(5):48-55.
[15]SUN Y X,VAN B J,WANG Z H.A new golden ratio local search based particle swarm optimization[C]//The 2012 International Conference on Systems and Informatics,2012:754-757.
[16]何兆成,杨文臣,梁诗,等.城市单交叉路口交通信号实时优化控制与仿真[J].计算机工程与应用,2010,46(33):239-243.
Parameter Calibration of VISSIM Simulation Model Based on Golden-Ratio Genetic Algorithm
Yang Wenchen1,2,Zhang Lun2,Wang Zheng2,Hu Chengyu1
(1.National Engineering Laboratory for Surface Transportation Weather Impacts Prevention,Broadvision Engineering Consultants,Kunming 650031,China;2.Key Laboratory of Road and Traffic Engineering of the Ministry of Education,Tongji University,Shanghai 201804,China)
The accuracy of microscopic traffic simulation model has direct influence on the reality of the simulation scene.By using the golden-ratio genetic algorithm,this paper presented the parameter calibration of VISSIM simulation model.Firstly,the standard process of microscopic traffic simulation and the mechanism of parameter calibration of VISSIM simulation model were discussed in details.Then,based on the throughput index,the objective function and discretization of GA individual parameter were designed,and the calibration algorithm of VISSIM simulation model was developed by golden-ratio genetic algorithm.Finally,taking a typical signalized intersection as the example,it analyzed the characteristics of calibrated traffic flow model and explored the effectiveness of the proposed algorithm by comparing with the observed traffic data in the field.Results show that drivers in China have aggressive driving habits,and the proposed algorithm significantly improve the accuracy of simulation model,while the parameter calibration effectiveness is related to the traffic intensity at the intersection.
microscopic traffic simulation;parameter calibration;golden-ratio genetic algorithm;parameter discretization;VISSIM
1005-0523(2017)03-0095-08
TP391.9;U491.51
A
(责任编辑 姜红贵)
2017-01-09
云南省交通厅科技计划(云交科2014(A)23);国家863计划课题(2012AA112307)
杨文臣(1985—),男,博士,主要研究方向为人工智能、智能交通控制系统、交通安全。
张轮(1971—),男,教授,博士,博士生导师,主要研究方向为智能交通运输系统。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
国学(2020年1期)2020-06-29
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
西南交通大学学报(2016年3期)2016-06-15
现代计算机(2016年34期)2016-02-28
中国工程咨询(2016年1期)2016-02-14
