基于WIFI的煤矿井下机器人环境参数监测系统
2017-06-22 22:27杨宣贾存良
东方教育 2017年6期
杨宣+贾存良

摘要:以单片机为核心,设计了煤矿井下机器人环境参数采集、数据WIFI无线发送装置的硬软件。基于LabVIEW软件编程,实现了数据WIFI无线接收、信息集成和图形化显示,可为煤矿矿难救援决策提供依据。
关键词:煤矿井下机器人;WIFI无线传输;环境参数监测
1前言
我国的煤矿大多瓦斯浓度较高,瓦斯爆炸引发的矿难时有发生。瓦斯爆炸后,煤矿井下原有的瓦斯、温度检测装置往往受到破坏而失去监测作用,因此事故地点环境参数未知,在此情况下贸然救援可能会引起次生灾害,危及救援人员生命安全。
本文研究了煤矿井下机器人所处位置的环境参数监测问题。当发生矿难时,通过下放煤矿井下机器人到达事故现场,利用其所附带的相关传感器对瓦斯、温度环境参数进行测取,然后通过WIFI无线方式将其传送到救援中心,为救援决策提供依据。在摸清井下受灾程度情况下,执行有针对性的救援措施,可以有效提升救援效率,增加被困人员的脱险可能性。
2系统结构
煤矿井下机器人环境参数采用传感器进行数据采集,具体为为温度、瓦斯(甲烷)气体浓度。同时,为反映机器人是否倾倒,参数检测裝置也需采集机器人倾角信息。单片机主要负责信息整合并通过串口发送指令操控无线WIFI模块;WIFI模块将采集到的数据由串口转换成无线信号,实现上位机与数据采集装置的数据通信。系统结构示意图如图1所示。
3 硬件设计及传感器选型
3.1单片机选择及其I/O口分配
单片机为环境参数采集装置的核心,本文选用STC89C52单片机,其为8051内核的ISP系统可编程芯片,片内含有512字节RAM、8KB 闪存程序存储器以及全双工串行口等。
在STC89C52单片机的端口分配上,其P2.0、P2.1引脚为与AD芯片PCF8591进行I2C串行通信的接口SDA、SCL信号线;P3.7引脚连接一线制温度传感器DS18b20;P3.0、P3.1引脚连接WIFI模块ESP8266。
3.2传感器选型
(1)温度传感器DS18B20
温度是煤矿井下环境的一个重要环境参数,尤其是瓦斯爆炸之后,井下可能还有火灾蔓延,因此,温度的检测是必不可少的。温度测量可选的传感器种类较多,其中数字式半导体温度传感器因其使用方便、数字量输出便于与微处理器相连而广获应用,本文选用一线制数字温度传感器DS18B20。
(2)角度传感器
井下环境多变,道路崎岖不平,为了识别机器人是否侧翻,本设计中使用SCA60C单轴倾角传感器反映当前机器人车身姿态,该传感器倾角0-180°时对应的模拟电压输出为0.5-4.5V。
(3)气体传感器
瓦斯的存在对采矿及救援都将造成巨大的阻碍,是煤矿井下机器人最主要的受监测参数之一。瓦斯的主要成分是甲烷,MQ-5气体传感器对甲烷气体有着不错的灵敏度,因此本文采用MQ-5对瓦斯浓度进行检测。
3.3 A/D转换模块PCF8591
PCF8591是一个4路模拟量输入、I2C串行总线数字量传输的集成模数转换器,通过对其A0、A1和A2引脚电平状态的控制,可以方便的选择4路模拟量中的1路对之进行8位数字量转换。
3.4 WIFI模块ESP8266
本模块采用802.11 b/g/n无线协议,主频支持80MHz和160 MHz,支持 RTOS;内置10 bit高精度ADC;内置TCP/IP协议栈;WiFi @ 2.4 GHz,支持WPA/WPA2安全模式等。本设计使用到的是以ESP8266为核心的贴片式模组ESP-01,其自带3DBi 的PCB板载天线。
4 机器人环境参数采集程序设计
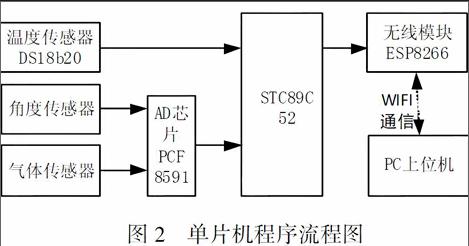
煤矿井下机器人通过倾角传感器感知自身姿态,通过传感器了解周围环境关键参数,比如温度、瓦斯浓度。采集数据之后,通过WIFI模块传输数据到上位机进行处理以及显示,其单片机程序流程图如图2所示。
为了实现以上各种功能,本程序使用了单片机定时器、中断、串口等资源进行数据采集及发送。
本设计中软件包括头文件、变量的定义、程序声明及各种程序初始化。通过AT指令对ESP8266进行模式控制,使之进入UDP模式,采用ESP8266最小系统接线方式,单片机可以通过串口进行无线收发控制。之后通过ADC转换实现数据采集,并将数据通过WIFI传到到上位机PC中。
WIFI模块可以经由TTL-USB接口连接到PC机上,通过串口调试助手sscom4.2对其进行调试,首先利用AT+CIPSTART指令建立UDP服务器IP地址和端口号(如本系统中为61557),然后利用AT+CIPMODE设置透传传输模式,最后利用AT+CIPSEND启动数据发送,此时,单片机即可经由串口输出经由WIFI模块发送的数据。
5 上位机的设计
相较于VB、VC等文本语言,LabVIEW采用图形化G语言进行编程,编程效率高,加之其拥有测控方面的丰富工具包,非常适合于本文上位机监测界面设计。
在LabVIEW中进行图形化VI编程,主要为两部分,一是UDP函数打开、UDP数据读取和UDP关闭等,其作用是指定被监听数据的网络地址和端口号(如61577),并从UDP输出接口输出WIFI上传数据;二是将接收到的数据整理并图形显示。完成以上两个任务的LabVIEW程序如图3所示。
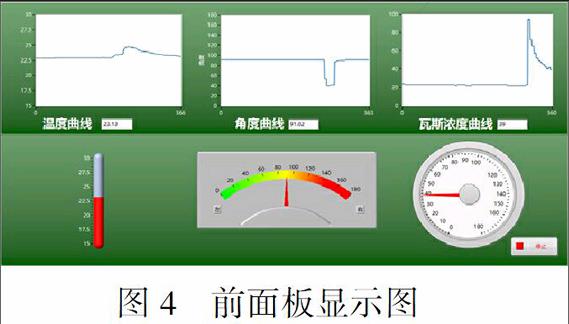
前面板显示程序运行时如图4所示,上部为环境参数曲线图,下部为当前值对应棒图和仪表式显示方式。
6结语
本文设计了煤矿井下机器人环境参数监测装置,给出了以单片机为核心的传感器采集和WIFI无线传输硬、软件设计,通过LabVIEW对接收的无线数据进行信息处理,实现了上位机煤矿井下机器人环境参数的直观显示。本文没有涉及煤矿井下机器人的行走控制和WIFI传输中继问题,对一个实用的系统来说,这些问题均需在后续的研究中完善解决。
参考文献:
[1]王国庆,许红盛,王恺睿. 煤矿机器人研究现状与发展趋势[J]. 煤炭科学技术,2014,02:73-77.
[2]周东健,张兴国,李成浩. 多机器人系统协同作业技术发展近况与前景[J]. 机电技术,2013,06:146-150.