可控RRRPP型机构的可动性与轨迹图谱研究*
2017-07-01 18:00宋胜涛赵建文马瑶金航旭中北大学机械与动力工程学院太原030051
组合机床与自动化加工技术 2017年4期
宋胜涛,赵建文,马瑶,金航旭(中北大学机械与动力工程学院,太原030051)
可控RRRPP型机构的可动性与轨迹图谱研究*
宋胜涛,赵建文,马瑶,金航旭
(中北大学机械与动力工程学院,太原030051)
文章以RRR型和PPR型二级杆组为基本杆组所组成的RRRPP构型为研究对象,首先,在选定原动件以及运动类型的前提下,分析了机构的可达工作空间以及奇异位形,得到了该机构的可动性边界条件;其次,在此基础上,研究了机构在不同可控因素下末端输出点的轨迹图谱;最后,研究了快速绘制机构的灵活工作空间的方法。研究结果为工程设计者在给定的工作轨迹设计机构时提供了有价值的参考。
RRRPP型机构;工作空间;奇异位形;可动性;轨迹图谱
0 引言
两自由度平面五杆机构是最简单的机器人机构,而任何一种机构都有可能成为组成机器人的重要组成部分,诸如五杆机构的打结器[1]、油菜钵苗移栽机[2]、下肢康复训练机构[3]和动臂-斗杆机构[4]等现代机器中得到广泛应用。平面五杆机构的基本构型13种[5],包含转动副(R)和移动副(P)两种铰链,按照含有的转动副和移动副的数目共分为5类,分别是5R (RRRRR)、4RlP(RRRRP、RRRPR和RRPRR)、3R2P (RRRPP、RRPRP、RRPPR、RPRPR、PRRRP和PRRPR)、2R3P(RPRPP、RPPRP和PRPRP)。五杆机构的研究大多数集中在5R型全转动副机构上和少数的单移动副上[6],涉及可动性[7]、求解空间[8]和奇异性[9]等多个方面。含两个移动副五杆机构的系统性研究目前不多,并且对于末端输出点的输出轨迹与可控性因素之间的规律研究相对薄弱。
可动性作为机构尺寸综合的前提,针对RRRPP型曲柄滑块平面机构,首先从可动性条件入手,在文献[10]对称四杆机构输出曲线形状图谱的基础上,进一步对五杆机构末端输出点的输出轨迹与可控性因素之间的关系图谱进行研究,找出两者之间的影响规律为RRRPP型五杆机构的设计提供了理论依据。
1 RRRPP型平面五杆机构数学模型描述
图1为RRRPP型平面五杆机构运动简图表示。由3个转动副和2个移动副,将2个RR型二副构件(连杆1、连杆2)、2个RP型二副构件(滑块3和机架5)和1个PP型二副构件(连杆4)连接起来。该运动链可由7个参数定义,分别是杆长l1和l2、杆4的角度α、移动副偏距m和n、滑块位移量l3和l4。

图1 RRRPP型平面五杆机构运动简图
2 RRRPP型平面五杆机构可动性研究
所谓可动性条件,即两个原动件分别按其运动规律运动时机构所应满足的最小尺寸条件。在两自由度RRRPP型平面五杆机构中,取连架杆1和4分别作为原动件1和2进行可动性分析。
2.1 机构可达工作空间的求解
为了研究方便将机构分解成由机架、杆1和杆2所组成的开环机构1(图2a)和由机架、滑块3和杆4所组成的开环机构2(图2b)两个机构进行研究。

图2 分解出的开环机构
容易得出开环机构1末端输出点P的可达工作空间为图3中由边界B1和B2所构成的圆环区域,其中边界B1是以O为圆心l2-l1为半径的圆、边界B2是以O为圆心l2+l1为半径的圆。

图3 机构1点P的可达工作空间
开环机构2的末端输出点P的可达工作空间为图4中有边界B3、B4、B5和B6围成的平行四边形,其中B3和B5是l3的最大值、B4和B6是l4的最大值。

图4 运动链2点P的可达工作空间
由运动链1和运动链2的可达工作空间相交便可得到RRRPP型曲柄滑块平面五杆机构的可达工作空间,而当运动链1的可达工作空间包含于运动链2的可达工作空间时,RRRPP型曲柄滑块平面五杆机构的可达工作空间达到最大为运动链1的可达工作空间。
2.2 机构的奇异位形分析
对于任何机构,在它在运动过程中难免遇到奇异位形,在这些位置机构会出现特殊的现象,或者处于死点不能继续运动、或者失去稳定性,甚至自由度也发生改变。
对RRRPP型平面五杆机构的死点奇异位形进行分析找出机构的最大灵活工作空间。根据曲柄滑块的死点奇异形成原理可知,当图5中AP垂直于PC时两机构瞬时失去一个自由度,在两个原动件的驱动下机构将出现死点而停止运动或者损坏机构。

图5 机构死点奇异位形
以O为原点建立笛卡尔坐标系,当AP⊥PC时,出现死点奇异位形时末端输出点P位置和输入角度θ的关系为:

将式(2)代入到式(1)中,并消去θ得到末端输出点P的奇异轨迹P1:

同理可得,当P点位于O点左侧时末端输出点P的奇异轨迹P2:

因此可得RRRPP型五杆机构在可达工作空间内P点的奇异轨迹,如图6所示。

图6 点P的奇异轨迹
2.3 机构灵活工作空间及可动性边界条件的求解
分析P点奇异轨迹可知,当杆1和杆2重叠时取得机构灵活工作空间的左边界B3和右边界B5,如图7所示,其中阴影部分即为机构的灵活工作空间。

图7 RRRPP型机构的灵活工作空间
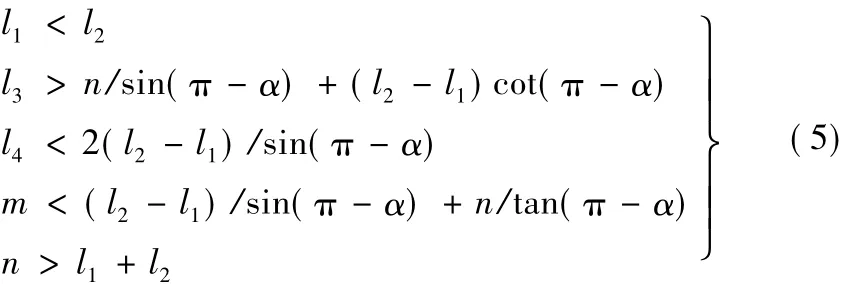
由此可得RRRPP型平面五杆机构的可动性边界条件为:

其中,DF、CD、OE的长度均可通过图8所示的几何关系用杆长l1、l2、l3、l4表示出来,表示结果如下:

将式(4)代入式(3)中得RRRPP型曲柄滑块平面五杆机构的可动性边界条件:
3 RRRPP型平面五杆机构的轨迹图谱
3.1 轨迹图谱的绘制与分析
由图1可知RRRPP型平面五杆机构有l1、l2、l3、l4、m、n、α七个几何参数以及原动件运动频率f1、f2两个运动参数。根据图7和可动性边界条件(5)可知,为保证机构的灵活工作空间最大,就需要将机构的几何参数l3、l4、m、n由l1、l2、α按照可动性条件近似表示出来,取l1、f1为参照尺寸,则l2:l1、f1:f2可作为替代l1、l2、f1、f2的综合参数,所以最终影响输出点P轨迹的因素变为l2:l1、f1:f2、α和曲柄的初始角四个参数。
设α=100°,采用SolidWorks软件进行实例建模,分别绘制了以l2:l1、f1:f2和曲柄的初始角为变量的输出轨迹图谱,如图9所示。


图9 输出轨迹图谱
分析轨迹图谱可知,随着原动件频率的比值与1的差的绝对值的增大,轨迹的自相交次数呈增加的趋势即轨迹越来越复杂;随着l2:l1比值的增大,轨迹整体纵横比越来越小而形状的相似度变化很小;随着曲柄初始角的增大,轨迹的自相交次数和纵横比在不同的频率比下有着不同的变化。
3.2 连续变化图谱与机构工作空间的绘制
图9中的图谱是按照曲柄初始角度等间距取值所绘制的部分代表性轨迹,在实际的工程设计中可作为轨迹匹配的参照,进一步的拟合需要对取值间距内的轨迹进行详细的对比,下面介绍一种任取初始角间隔快速连续输出其轨迹以及用轨迹描绘灵活工作空间的方法。

为例进行说明曲柄初始角间隔β=15°时快速输出轨迹的方法。
采用SolidWorks进行简单的机构建模,设原动件1(曲柄)的转速n=30 rpm,则机构的运动周期T= 2s,为使曲柄初始角间隔取为15°,那么只需使曲柄的初始角在机构每个运动周期上增加15°,即在原动件2的周期保持不变的情况下使原动件1的转速变为:

为了能清楚表示轨迹的形状,按照曲柄的初始角均分成三个部分进行Motion仿真,输出的轨迹如图10a~图10c所示,通过拖动时间轴定位指针就可以确定每15°对应的输出轨迹;图10d为曲柄初始角从0变化到360°时的输出轨迹,其中的阴影区域即为机构的灵活工作空间,轨迹线仅为曲柄转速n=31.25rpm间隔β=15°时的工作空间轨迹。亦可知,通过改变曲柄初始角取值间隔β即可控制机构输出工作空间轨迹线的网格大小。
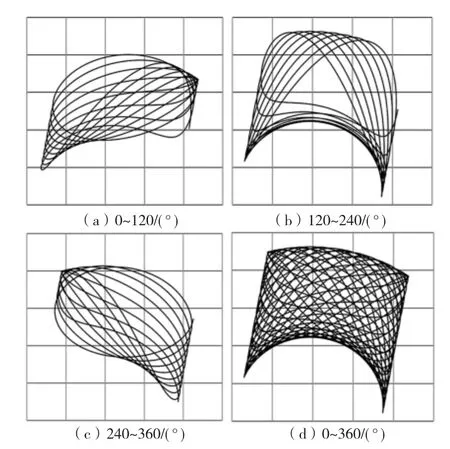
图10 连续图谱及工作空间
4 结论
(1)通过对输出轨迹图谱的研究,进一步验证了RRRPP型平面五杆机构可动性边界条件的正确性。
(2)随着原动件频率的比值与1的差的绝对值的增大,轨迹的自相交次数呈增加的趋势即轨迹越来越复杂;随着l2:l1比值的增大,轨迹整体纵横比越来越小而形状的相似度变化很小;随着曲柄初始角的增大,轨迹的自相交次数和纵横比在不同的频率比下有着不同的变化。
(3)机构图谱的研究结果以及快速绘制工作空间的方法为RRRPP构型的设计提供了重要的理论依据。
[1]尹志光.基于混合驱动五杆机构的打结器优化设计与控制仿真[D].上海:上海交通大学,2009.
[2]廖庆喜,刘明峰,张照,等.油菜钵苗移栽机双五杆栽植机构多目标优化设计[J].农业机械学报,2015,46 (11):49-56.
[3]刘正士,张倩倩,王勇,等.基于五杆机构的下肢康复训练机构设计[J].华中科技大学学报(自然科学版),2013,41(S1):309-311.
[4]宋胜涛,李瑞琴,高燕,等.混合驱动4R1P机构实现动臂-斗杆机构轨迹[J].机械设计与研究,2011,27(4):20-22.
[5]杨金堂.受控五杆机构实现轨迹理论与实验研究[D].武汉:武汉科技大学,2009.
[6]郭为忠,黄其高,邹慧君,等.4R1P型平面五杆机构的可动性与特征图表示[J].机械工程学报,2005,41(8): 42-49.
[7]RuiQin Li,Jian S Dai.Orientation angle workspaces of planar serial three-link manipulators[J].Science in China Series E:Technological Sciences,2009,524.
[8]彭利平,訾斌.混合驱动平面五杆机构的工作空间研究[J].机械传动,2010,(4):20-23.
[9]周双林,姚燕安,郭为忠.混合输入五杆机构的奇异性分析[J].上海交通大学学报,2001,35(12):1817-1820.
[10]Robert L Norton,机械设计Desing of Machinery[M].北京:机械工业出版社,2011.
(编辑李秀敏)
Research on Mobility and Trajectory Atlas of Controlled RRRPP Mechanism
SONG Sheng-tao,ZHAO Jian-wen,MA Yao,JIN Hang-xu
(School of Mechanical and Power Engineering,North University of China,Taiyuan 030051,China)
This paper uses the RRRPP configuration formed by the basic lever RRR and PPR assur group gradeⅡas the research object,firstly,on the basis of the driving link and its motion type was selected,the reachable w orkspace and singular configuration of mechanism was analyzed,the mobility boundary conditions of mechanism w as obtained;Then,based on which,the trajectory atlas of the end-effector of mechanism under different controllable factors w as analyzed;Finally,the method of rapid-drawing the flexible workspace of the mechanism w as analyzed.The results provides a valuable reference for the engineering designers to design mechanism with specific w ork trajectory.
RRRPP mechanism;workspace;the singular configuration;mobility;the trajectory atlas
TH112;TG506
A
1001-2265(2017)04-0014-04
10.13462/j.cnki.mmtamt.2017.04.004
2016-12-08
国家自然科学基金资助项目(51275486)
宋胜涛(1979—)男,太原人,中北大学副教授,博士,研究方向为现代机械设计理论与方法研究,(E-mail)965516520@qq.com。
猜你喜欢
世界科学技术-中医药现代化(2021年7期)2021-11-04
南方农机(2021年3期)2021-02-07
少先队活动(2020年12期)2021-01-14
湖北农机化(2020年17期)2020-11-02
求学·理科版(2017年10期)2017-12-19
新商务周刊(2017年5期)2017-10-16
中成药(2017年3期)2017-05-17
婚姻与家庭·性情读本(2017年1期)2017-02-16
领导科学论坛(2016年9期)2016-06-05
中国自行车·骑行风尚(2014年2期)2014-05-07