
一种面向文物本体微小变化监测的三点重定位方法
2017-07-05 02:38陈冬冬黄睿冯伟王小伟柴勃隆丁淑
敦煌研究 2017年3期
陈冬冬+黄睿+冯伟+王小伟+柴勃隆+丁淑君+孙济洲
内容摘要:在对文物进行预防性保护中,需要对监测点进行定期监测而获得监测数据。由于大多数文物依存环境不允许在监测点处设置监测标记,因此不破坏文物依存环境的重定位技术就显得尤为重要。本文提出了一种基于几何约束的三点重定位方法,借助激光标线仪、激光测距仪等设备,在不需要破坏文物依存环境的情况下,对监测点进行精确的重定位。重定位的理论精度达到了0.1mm。在实验室和敦煌莫高窟的实际实验中证明,我们提出的三点重定位方法重定位精度高、操作简单、易于安置、不破坏文物的依存环境,适用于多种监测环境。
关键词:监测;重定位;自由度;基准点
中图分类号:K854.2 文献标识码:A 文章编号:1000-4106(2017)03-0132-06
Abstract: During the preventive conservation of cultural relics, regular monitoring is needed to obtain data. Because most cultural relics rely on their environment for stability, which makes it impossible to set accurate marks in monitoring equipment, non-destructive relocation techniques are very important. In this study, the authors propose a geometric constraints-based three-point relocation method that would resort to devices such as laser distance measurement instruments(LDMI)and laser marking instruments(LMI). Even in such opera tio-ns where the theoretical accuracy of relocation is 0.1 mm, this technology can relocate monitoring points accurately without destroying the cultural relics.Bothlab experiments and field tests at Dunhuang Mogao grottoes prove that this method has the advantages of high relocation accuracy, simple operation, easy preparation, and being entirely non-destructive, as well as being applicable to diverse monitoring environments.
Keywords: monitor; relocation; degrees of freedom(DOF); reference points
1. 背景介绍
中国历史悠久,文化遺产丰富。然而,随着经济全球化趋势和现代化进程的加快,我国的文化生态正在发生巨大变化,许多历史文化名城(街区、村镇)、古建筑、古遗址以及风景名胜区整体风貌遭到破坏,由于过度开发和不合理利用,许多重要物质文化遗产消亡或失传,具有不可再生特性的物质文化遗产现今面临着留存延续的危机。
在物质文化遗产保护领域,普遍认为,对物质文化遗产采取预防性保护,其效果完全优于紧急情况下的抢救性修复。预防性保护的基本理念是,建筑遗产的损毁或破坏是可以通过控制引起损毁或破坏的主要因素得以降低或消除的[1]。它不同于以往物质文化遗产损毁后应急性的保护工程,强调基于信息收集、精密勘察、价值和风险评估等来确定文化遗产面临的风险因素,通过定期检测和系统监测来分析物质文化遗产的劣化规律,然后采取灾害预防、日常维护、科学管理等措施及时降低或消除面临的风险,从而实现遗产的全面保护[2]。
2014年,敦煌研究院王旭东院长也同样在莫高窟风险监测预警体系中,将前端数据采集系统放置于一个基础位置上。他强调应该构建一个监测体系以采集石窟大环境、洞窟微环境、石窟崖体、文物本体、游客等方面的监测数据[3]。其中,针对石窟大环境、洞窟微环境、石窟崖体、游客等方面的研究和监测工作已经开展多年,并且获得了很多的数据和成果。
然而由于文物(壁画)本体病害的演变是一个长期且缓慢的过程,再加之受监测成本等因素的影响,不可能对所有监测点都采取定点监测的方法。同时,为了便于对病害进行分析和度量,要求监测区域、监测仪器、仪器的参数和光照条件等必须精确一致,即需要对监测平台进行精确重定位。以上这些因素尤其是重定位因素使得对文物本体的监测工作止步不前。
目前,直接以恢复相机的位置和姿态为目标的相机重定位研究并不多,Shotton J等人研究了利用深度相机(RGB-D Camera)实现相机重定位的方法[4],但Shotton的方法需要通过算法训练已知的场景,然后借助深度相机拍摄的带有深度信息的图像才能实现特定位置相机姿态估计,从而完成相机重定位工作。同时,重定位工作也一直是SLAM(及时定位与地图构建)中研究的内容[5-7]。然而,该研究中重定位仅作为中间过程,其目标是为了构建地图和实现导航,其方法也往往借助机器人在不断运动过程中连续采集的各种信息来构建场景,进而实现机器人位置的定位。因此,这些方法难以应用于针对某一特定位置来实现相机重定位而无需构建周围整个场景信息的情况。
与Shotton等人基于深度相机的重定位方法不同,本文所提出的三点重定位方法不需要训练,直接使用测距仪等配套硬件进行相关操作便可实现精确的重定位。其次,在重定位过程中,我们无需在监测现场打标记点,因此这种方法可以保证不破坏文物依存环境,这一特点也使得该方法的环境约束少,从而可适用于更多的监测环境。
2. 重定位方法
2.1 基本原理
2.2 监测平台组件
监测平台是我们实验室在进行“敦煌莫高窟风险监测与评估关键技术研究”课题时,为监测文物的微小变化而设计出来的一个精确监测设备。其主要构成组件包括:
ɑ)三个激光标线仪,记为LMI1与LMI2和LMI3,可分别发射出一条水平激光线L1和两条垂直激光线L2和L3;
b)两个激光测距仪,记为LDMI1和LDMI2,可分别测量到达L2和L3的距离;
c)一个微动云台,可以在平面上调节3个自由度:分别为x和y轴的平移以及绕z轴的旋转角;
d)工业相机和基准点相机,分别用于监测文物微小变化和记录基准点;
e)光源、舵机、传感器、电路板等设备置于平台内部,以完成平台的自动调平工作。
在以上设备中,LDMI1、LMI1和工业相机被固定在平台内部,以确保它们的相对位置不发生变化,而LDMI2在平台内部可在水平面上绕z轴旋转。
除此之外,还需要一些辅助设备,例如三脚架、控制电脑等。其中,三脚架可以调节平台高度和粗调绕x和y轴的旋转以使平台粗略水平,电脑可以总控平台的各种参数。
2.3 操作步骤
监测平台的重定位工作是基于首次定位时记录的信息去恢复平台的位置、姿态和内部其他部件的参数信息。因此,重定位工作包含首次定位和重定位两步。
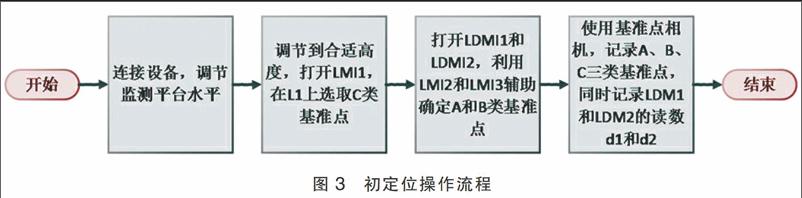
2.3.1 首次定位的步骤(图3)
A.连接相关设备,根据目标拍摄区域的位置,将三脚架置于监测区域前方合适的拍摄位置和高度,使得工业相机和监测区域的高度基本一致,然后运行调平程序,调节监测平台到水平状态,最后旋转微动云台,从而调节监测平台的水平摆角使工业相机正对监测区域。
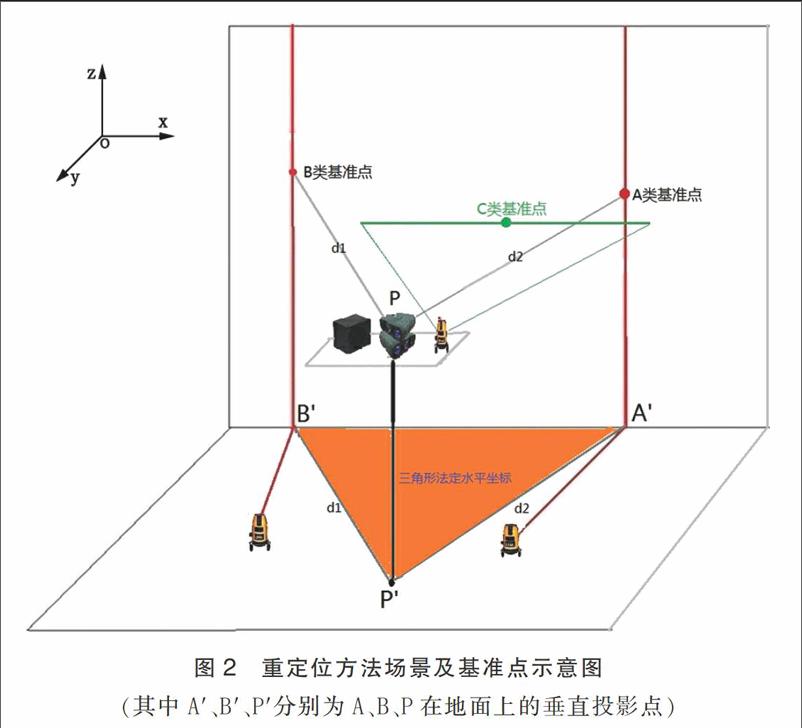
B.打开水平激光标线仪LMI1,在前方监测区域投射出一条水平激光线L1,在该激光线上选取一个或多个具有明显特征的标志点作为C类基准点。例如:文物图像中的十字交叉点、线的交汇点等。基准点的选取应保证容易识别。
C.打开固定激光测距仪LDMI1和旋转激光测距仪LDMI2,其中LDMI1在前方壁画上投射出一个激光点a,旋转LDMI2至合适位置(即保证LDMI2投射出的激光点b所在的垂线上有多个明显的特征点),然后打开地面上的两个竖直激光标线仪LMI2和LMI3,使其投射出的两条激光线L2和L3分别经过激光点a和b,最后在L2和L3上分别选取A类基准点和B类基准点,选取原则和C类基准点相同(即容易识别)。
D.使用基准点相机拍摄和记录A、B、C类基准点以及三脚架位置的,同时记录LDMI1和LDMI2的读数,并分别记为d1和d2。
由B和C步骤可知,基准点的选取灵活,同时,为了保证重定位的稳定性,每类基准点可以选取多个,从而消除单个基准点所带来的不稳定性。2.3.2 重定位的步骤(图4)
A.连接相关设备,根据基准点相机记录的三脚架位置,将三脚架初步移到大概位置,然后运行调平程序,调节监测平台到水平状态,最后旋转微动云台,从而调节监测平台的水平摆角使工业相机正对监测区域。
B.打开水平激光标线仪LMI1,根据C类基准点调节三脚架高度,使水平激光线L1过C类基准点。
C.根据A和B类基准点图片找出A和B类基准点,然后打开竖直激光标线仪LMI2和LMI3,使竖直激光线L2和L3分别过A和B类基准点。
D.打开固定激光测距仪LDMI1,旋转监测平台,使激光点a落在L2上,移动三脚架位置,使LDMI1的读数逼近d1。
E.打开旋转激光测距仪LDMI2,并旋转LDMI2,使激光点b落在L2上,移动三脚架,使LDMI2的读数逼近d2。
F.多次重复步骤D和E,直至LDMI1和LDMI2的读数都精确接近d1和d2,然后再次确认监测平台的高度,使L1过C类基准点,则重定位完成。
3. 实验
为验证本文所提出的重定位方法,我们在实验室环境下,以室内大型仿制壁画的多处场景和壁画病害样本为监测目标,拍攝距离控制在0.5—2m,利用实验室所搭建的监测平台和本文所提出的三点重定位方法,分别模拟初定位和重定位,然后在像素级别和毫米级别去分析重定位的精度。按照2.3.1和2.3.2的操作步骤,我们进行了4次模拟实验,获得的监测图像(图5),而4组实验的初定位和重定位的激光测距仪的读数对比如表1所示。
我们采用的精度分析方法是:首先使用SIFT[8]算法,提取两幅图像的特征点并做匹配,然后使用RANSAC[9]算法去除错误的匹配点对,得到正确的匹配点对A1(xɑ1,yɑ1)和B1(xb1,yɑ2),A2(xɑ2,yɑ2)和B2(xb2,yb2),…,An(xɑn,yɑn)和Bn(xbn,ybn),从而得到对应特征点对的距离:
最后,由公式(1)得到像素级误差:
然后经过表2的比例将像素级误差errorpixel转换为毫米级误差,不妨设实际值为t,对应的像素值为p,则毫米级误差为:
则4组实验的特征点匹配如图6所示,误差如表3所示。
由表3可知,实验3的精度最高,整体误差为1.1mm,因此,我们的方法已经可以精确到0.1mm。
总的来说,在模拟实验中,三点法重定位的精度可达0.1mm,同时,由于无需打标记点,使得本方法在多种监测环境均适用。
4. 总结
本文提出了一套合理的面向文物微小变化监测的三点重定位方法,有效地解决了监测过程中监测平台重定位的问题,定位过程快,操作灵活。具体来说,有如下优点:
1)重定位精度高。本文提出的监测设备采用了激光测距仪和激光标线仪来辅助重定位,测量精度可达毫米级别,而在实验室模拟重定位时,物理误差上可达0.1mm。
2)重定位速度快。當操作上采取合理的调节策略可使激光测距仪读数迅速收敛到第一距离d1和第二距离d2,同时借助激光标线仪来迅速恢复相机高度,保证操作效率。
3)基准点的选取灵活。同时,为了保证重定位的稳定性,每类基准点可以选取多个,从而消除单个基准点所带来的不稳定性。
4)环境约束少,适用于多种监测环境。在环境约束要求方面,本方法只需要在拍摄区域方向上(即拍摄前方)存在一面墙壁或遮挡物即可进行重定位。
参考文献:
[1]吴美萍.预防性保护理念下建筑遗产监测问题的探讨[J].华中建筑,2011(3):169-171.
[2]白成军,韩旭,吴葱.预防性保护思想下建筑遗产变形监测的基本问题探讨[J].西安建筑科学大学学报:社会科学版.2013,32(2):54-58.
[3]王旭东.基于风险管理理论的莫高窟监测预警体系构建与预防性保护探索[J].敦煌研究,2015(1):107-108.
[4]Shotton J,Glocker B,Zach C,et al.Scene coordinate regression forests for camera relocalization in RGB-D images[C]//Proc.IEEE Computer Vision and Pattern Recognition (CVPR), 2013:2930-2937.
[5]Williams B,Klein G,Reid I.Automatic relocalizat-ion and loop closing for real-time monocular SLAM[J].IEEE Pattern Analysis and Machine Intelligen-ce,2011,33(9):1699-1712.
[6]Davison A J, Reid I D, Molton N D,et al.MonoSLAM: Real-time single camera SLAM[J].IEEE Pattern An-alysis and Machine Intelligence,2007,29(6): 1052-1067.
[7]Durrant-Whyte H,Bailey T.Simultaneous localizat-ion and mapping: part I[J].IEEE Robotics & Amp Au-tomation Magazine, 2006, 13(2): 99-110.
[8]Lowe D G.Object recognition from local scale-inv-ariant features[C]//Proc.IEEE Computer Vision,1999,2:1150-1157.
[9]Fischler M A,Bolles R C.Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Com-munications of the ACM.1981,24(6):381-395.
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
今日农业(2021年17期)2021-11-26
现代测绘(2021年1期)2021-04-28
河南水利年鉴(2020年0期)2020-06-09
中国交通信息化(2019年7期)2019-10-08
世界家苑(2017年4期)2017-07-23
互联网天地(2016年2期)2016-05-04
互联网天地(2016年1期)2016-05-04
创业家(2015年4期)2015-02-27
