
基于变速积分PID的KRG速比控制策略研究
2017-07-06 11:03徐炎炎韦龙平
重庆理工大学学报(自然科学) 2017年6期
于 英,徐炎炎,韦龙平
(1.江苏大学 汽车与交通工程学院, 江苏 镇江 212000; 2.吉孚动力, 江苏 苏州 215000)
基于变速积分PID的KRG速比控制策略研究
于 英1,徐炎炎1,韦龙平2
(1.江苏大学 汽车与交通工程学院, 江苏 镇江 212000; 2.吉孚动力, 江苏 苏州 215000)
以新型锥环无级变速器为研究对象,针对在车辆速比变化较大工况下目标速比阶跃输入对实际速比影响较大的情况,采用变速积分PID控制器对锥环无级变速器的速比进行控制。通过Matlab/Simulink建立整车仿真模型和变速积分控制器模型,对急加速和全减速两种典型工况进行仿真分析,验证整车仿真模型和变速积分速比控制策略的正确性。基于dSPACE系统对搭载锥环无级变速器的样车进行实车试验,将试验结果与仿真结果对比,验证速比控制策略的可行性。
锥环无级变速器;锥环无级变速器;变速积分;PID;速比控制
目前,对驾乘舒适性与低油耗要求的不断提高推动了金属带式无级变速器在很多车型上的应用,但是其成本比传统变速器高出许多,因此低成本高效能的无级变速器成为国内外研究热点[1-3]。德国吉孚动力开发的锥环无级变速器(KRG)通过2个圆锥与锥环的摩擦传递动力,其主要元件如滚锥和传动环、胀紧机构和速比调节执行机构都是纯机械控制[4],能在高效及低功耗的条件下进行快速、连续的速比调节,大大提高了车辆舒适性和燃油经济性。本文将对锥环无级变速器的关键技术——速比控制策略进行研究。
1 KRG的变速原理
1.1 KRG结构组成
锥环无级变速器的变速系统由输入圆锥、输出圆锥、锥环和调整结构组成,锥环绕在输入圆锥上,如图1所示。发动机输出的动力通过2个圆锥与锥环间的摩擦传递[5]。
1.2 KRG速比调节原理
KRG由锥环与圆锥的摩擦来传递动力,通过改变锥环位置来实现速比调节。当锥环径向平面与圆锥轴线垂直时,锥环位置保持不变,速比就不变;当锥环径向平面与圆锥轴线成一定角度时,锥环随着圆锥的滚动在锥体表面左右移动,可连续地调节速比[6]。
图2为两个圆锥与锥环的几何关系,此时KRG的传动比可表示为:

(1)
式中:wcone-in为输入锥角速度;wcone-out为输出锥角速度;Rring-in为环的内半径;Rring-out为环的外半径;Rcone-in为接触点处输入锥半径;Rcone-out为接触点处输出锥半径。

图2 锥与环的几何关系
当锥环位于输入锥最小半径时,KRG处于最大速比状态,设锥环沿锥面方向上的位移为x,此时锥环的位移为0,则输入锥与输出锥的工作半径Rcone-in和Rcone-out分别为:
Rcone-in=Rcone-in0+x·sin(α)
(2)
Rcone-out=Rcone-out0-x·sin(α)
(3)
式中:Rcone-in0为初始位置处输入锥半径;Rcone-out0为初始位置处输出锥半径;α为圆锥锥角。
由式(1)~(3)可得锥环位移x与KRG速比i的关系:
(4)
图3为锥环位置和速比以及锥工作半径的关系曲线。可以看出:每个锥环位置都对应1个速比值,且和输入、输出锥的工作半径也一一对应。因此,通过调节锥环位置可以连续地改变速比。由于圆锥独特的形状特性,改变锥环位置只需要通过改变锥环转角就能实现。锥环转角则由电机通过锥环调整架控制,如图4所示。电机转角与锥环转角的关系为:

(5)
式中:Leccentric为偏心轴半径;Llever为推杆力臂长度;θmotor为电机转动的角度;ip为电机减速机构的速比。

图3 速比与锥环位置及锥工作半径关系

图4 KRG速比调节机构

φring=k·θmotor
(6)
2 变速积分PID速比控制策略
2.1 KRG速比控制方案
KRG速比控制可以解析为3个部分:工况识别、控制策略选择和系统执行。系统根据节气门开度和车速计算出当前工况下发动机目标转速和变速器目标速比,由锥环位置传感器信号可知当前速比,在此基础上选择对应的速比控制策略,由PID控制器计算出速比执行电机的PWM,驱动速比调节机构使锥环转动一定的角度[7]。由于输入锥存在一定的转速和其具有的特有形状,锥环可以在锥面上左右移动改变位置,实现速比的连续调节。
2.2 变速积分PID速比控制策略
传统的速比控制策略在处理车辆速比变化较大工况下的速比调节问题时难以根据系统偏差大小合理调整积分速度,整个系统的控制品质不太理想。这是由于普通PID算法中积分增益KI保持不变,不能在系统偏差大时减弱积分项,偏差小时加强积分项[8],而变速积分PID可以较好地解决这一问题。

(7)

(8)
变速积分PID控制器可表示为:
(9)
式中:fP为比例增益KP的系数;fI为积分增益KI的系数;fD为微分增益KD的系数。
3 速比控制仿真模型
3.1 整车仿真模型
通过对锥环无级变速器的速比调节和控制原理的分析,基于Matlab/Simulink模块搭建整车仿真模型,如图5所示[10-11]。该整车模型主要分为3个组成部分:驾驶员控制、速比控制回路和车辆行驶系统。其中速比控制回路包括目标速比计算模块(Target Ratio)、速比控制模块(Ratio Controller)、速比执行机构模块(Ratio Actuator)、变速器模块 (KRG)。车辆行驶系统包括发动机模块(Engine Model)、车辆传动系模块(Vehicle Model),路面条件模块(Road Condition)及行驶阻力模块(Resistance)。
3.2 变速积分PID控制器模型
整车仿真模型中的速比控制模块采用变速积分PID速比控制器,仿真模型如图6所示。

图5 整车仿真模型

图6 变速积分PID速比控制器
3.3 整车仿真参数
整车参数如表1所示。

表1 整车主要参数
4 仿真与试验结果对比分析
4.1 整车仿真结果分析
为了验证搭载KRG的整车仿真模型的正确性和变速积分PID控制器在速比变化较大工况下的控制品质,仿真模拟了汽车加速和减速工况。
4.1.1 加速工况仿真结果
仿真模拟车辆在水平路面行驶时的加速工况。假设初始节气门开度为45%、车辆行驶至11 s 时,节气门开度在2 s内增大至80%,仿真结果如图7~12所示。
由仿真结果可知:在车辆加速前,发动机以2 750 r/min转速工作,此时车速为130 km/h;在11 s时,节气门开度突然增大,此时发动机转速随之也快速增大,为了提高车辆的加速性能,锥环转角变为-0.25°,同时锥环位移变小,KRG速比增大;在12 s时,车速开始迅速增大,此时锥环往相反方向迅速回正,且锥环位移变大,速比逐渐减小;在14 s时,发动机到达了80%节气门开度下的目标转速4 000 r/min,此时车速与速比保持恒定,不再变化。在整个加速过程中,锥环目标位置与实际位置跟随性良好,目标速比与实际速比相吻合,车速上升平稳,车辆驾驶舒适性好。

图7 节气门开度与坡度

图8 发动机转速

图9 车速

图10 目标速比与实际速比

图11 锥环转角

图12 锥环目标位置与实际位置
4.1.2 减速工况仿真结果
仿真模拟车辆在水平路面行驶时的减速工况。假设初始节气门开度为80%、车辆行驶至16 s时,节气门开度在2 s内减小至0,仿真结果如图13~18所示。
由仿真结果可知:在车辆减速前,发动机以4 000 r/min转速工作,此时车速为155 km/h;在16 s时,节气门开度迅速减小,为了降低车速,锥环转动了0.2°,锥环位移持续增大,KRG速比从0.7降低至0.48,发动机转速也随之降低;在17 s时,锥环转角回正,锥环位移不再变化,速比保持恒定;在22 s时,发动机转速下降至目标转速800 r/min,锥环转过了一个负角度,锥环位移开始迅速减小,变速器速比持续增大,锥环在24 s时回正,锥环位移达到初始位置且不再变化,变速器达到最大速比2.8,此时车速不断减小直至停止。整个减速工况中,锥环目标位置与实际位置跟随性良好,目标速比与实际速比相吻合,车速下降平稳,车辆驾驶舒适性好。

图13 节气门开度与坡度

图14 发动机转速

图15 车速

图18 锥环目标位置与实际位置
仿真结果表明:两种工况下的目标速比与实际速比,锥环目标位置与实际位置都相吻合,速比控制过程与实际一致,验证了整车模型及速比控制策略的合理性。
4.2 样车试验结果分析
将德国吉孚自主研发的锥环式无级变速器搭载至某试验车辆,以MicroAutoBox取代原有变速器控制单元(TCU)[12],利用dSPACE系统进行加速、减速工况实车试验[13],进一步验证变速积分PID速比控制策略的控制品质。试验路况为平坦、干燥的沥青路面。图19~20为整车急加速和全减速工况试验结果。
实车试验结果表明:在急加速工况下,在26.2 s时驾驶员猛踩油门踏板使车辆加速,此时KRG实际速比与目标速比跟踪良好,车速变化平稳;在全减速工况下,约在5 s时驾驶员完全松开油门踏板,车辆减速,此时KRG速比先减小,后随着车速的下降而增大,直至变速器达到最大速比。
实车试验结果与仿真结果一致,再次说明变速积分PID控制器在速比变化较大的工况下可以保持高品质的速比控制。

图19 急加速工况
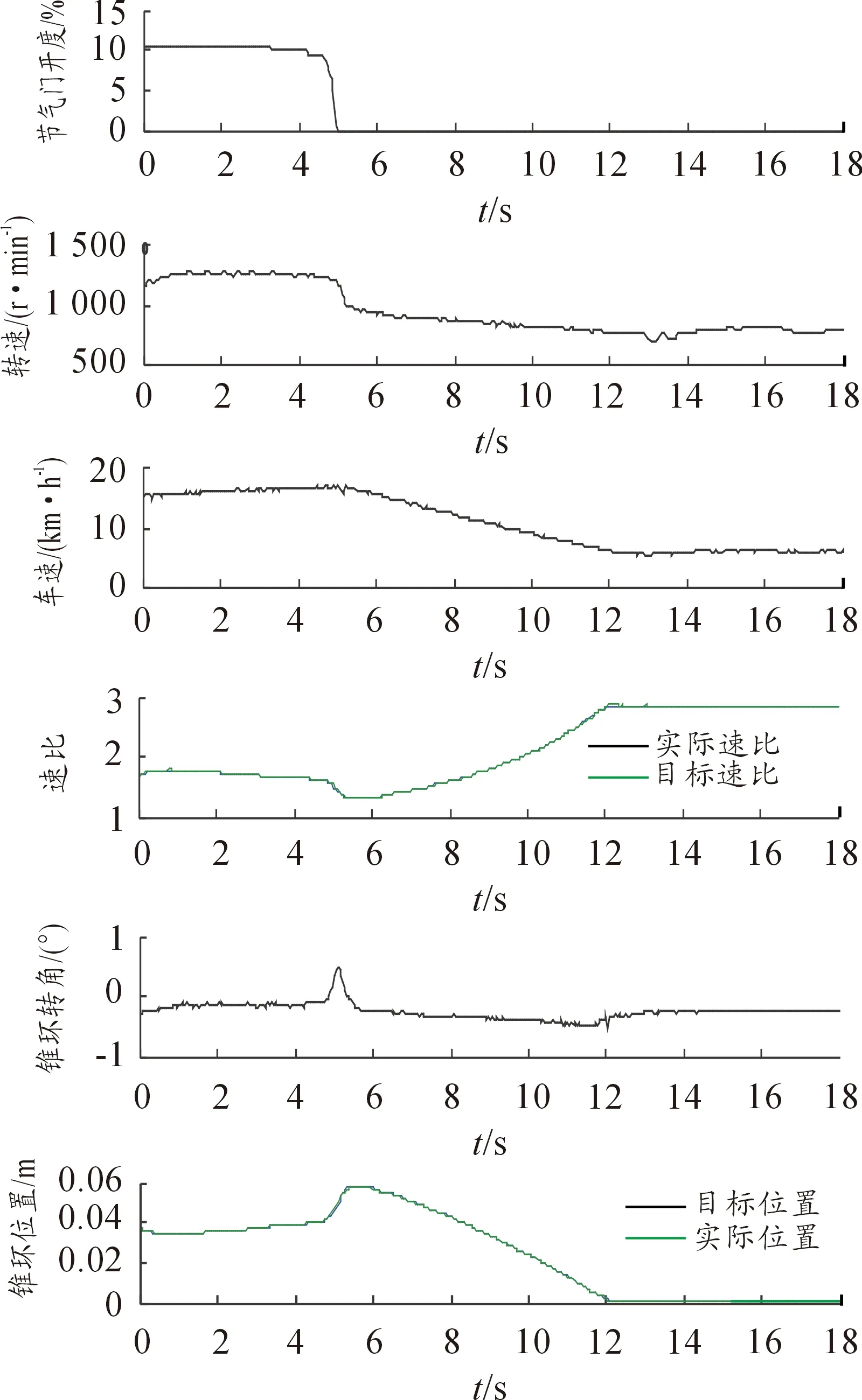
图20 全减速工况
5 结束语
基于Matlab/Simulink建立了搭载KRG的整车仿真模型和变速积分PID速比控制器模型,仿真模拟车辆加速和减速两种工况下KRG速比控制过程,结果表明:实际速比能较好地跟随目标速比变化,速比控制品质较好。对搭载KRG的样车进行了急加速、全减速两种典型工况的实车试验,结果表明在:变速积分PID控制策略下,速比变化较大时KRG各参数依然变化平稳,速比跟随性较好,再次验证了变速积分PID速比控制策略的有效性。
[1] 程乃士,张华伟,杨会林,等.汽车金属带式无级变速器-CVT原理和设计[M].北京:机械工业出版社,2007:1-6.
[2] 潘国扬,石晓辉,郝建军,等.新型无级变速器( CVT) 技术解析[J].重庆理工大学学报(自然科学),2015(2):30-35.
[3] 潘国扬,林健.推力钢带式和链式无级变速器NVH性能研究[J].重庆理工大学学报(自然科学),2016(3):28-33.
[4] 刘金波,李定山,李发军,等.KRG锥环无级变速器技术概述[J].中国科技信息,2012(18):104.
[5] CASPER J.Model based ratio control in a cone ring transmission,[D].Aachen:Technische University,2006.6.
[6] 陈志刚.基于锥轮位移的无级变速器传动比控制方法研究[D].长春:吉林大学,2012.
[7] 刘金琨.先进PID控制及其MATLAB仿真 [M].2版.北京:电子工业出版社,2006.
[8] 高中伟.金属带式无级变速器控制策略的研究[D].长春:吉林大学,2008.
[9] 周萍,聂晋,孙跃东.基于模糊PID控制的CVT速比仿真分析[J].机械传动,2011,35(8):25-28.
[10]赫允志.无级变速器控制系统与硬件在环仿真研究[D].重庆:重庆大学,2011.
[11]陈新文.机械电子式无级变速器仿真及其电控系统硬件设计研究[D].沈阳:沈阳工业大学,2012.
[12]宋翔.金属带式无级变速器与发动机的匹配研究与仿真[D].成都:西南交通大学,2012.
[13]张晋东.基于dSPACE的混合动力汽车AMT电机控制系统[D].长春:吉林大学,2006.
(责任编辑 刘 舸)
Research on Ratio Control Strategy of KRG Based on PID with Variable Integral
YU Ying1, XU Yan-yan1, WEI Long-ping2
(1.College of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212000, China; 2.GIF, Suzhou 215000, China)
KRG is studied as a new type of CVT. PID with variable integral is designed to control the speed ratio of KRG, under the influence of target speed ratio step input to actual speed with the driving condition of large speed ratio change. The vehicle simulation model and the cascade PID controller is build with Matlab/Simulink to simulate the acceleration and deacceleration typical working conditions to verify the correction of the simulation model and the PID with variable integral control strategy. The novel vehicle is test based on dSPACE and the result is compared with simulation result to verify the possibility of control strategy of speed ratio.
core ring continuously variable transmission; KRG; variable integral; PID; speed ratio control
2016-05-08
于英(1957—),女,黑龙江呼兰人,副教授,主要从事车辆传动及控制技术方面的研究; 徐炎炎(1991—),女,江苏南通人,硕士研究生,主从事汽车传动系统研究,E-mail:YANYAN_XU91@163.com。
于英,徐炎炎,韦龙平.基于变速积分PID的KRG速比控制策略研究[J].重庆理工大学学报(自然科学),2017(6):15-22.
format:YU Ying,XU Yan-yan,WEI Long-ping.Research on Ratio Control Strategy of KRG Based on PID with Variable Integral[J].Journal of Chongqing University of Technology(Natural Science),2017(6):15-22.
10.3969/j.issn.1674-8425(z).2017.06.003
U463.212
A
1674-8425(2017)06-0015-08
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中等数学(2021年6期)2021-08-14
小学生学习指导(高年级)(2021年6期)2021-06-19
哈尔滨轴承(2021年4期)2021-03-08
内燃机与配件(2020年3期)2020-09-10
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年19期)2018-04-28
汽车工程(2016年11期)2016-04-11
汽车维修与保养(2015年1期)2015-04-17
汽车零部件(2014年5期)2014-11-11
