
基于三维激光雷达的道路可通行区域分割提取方法*
2017-07-12 17:02邹斌饶阳侯献军王科未
汽车技术 2017年6期
邹斌 饶阳 侯献军 王科未
(武汉理工大学,现代汽车零部件技术湖北省重点实验室 汽车零部件技术湖北省协同创新中心,武汉 430070)
基于三维激光雷达的道路可通行区域分割提取方法*
邹斌 饶阳 侯献军 王科未
(武汉理工大学,现代汽车零部件技术湖北省重点实验室 汽车零部件技术湖北省协同创新中心,武汉 430070)
为实现无人驾驶车辆利用车载三维激光雷达提取道路可通行区域,提出了一种基于小波变换结合模糊线段拟合的道路分割提取方法。利用探测倾角聚类的方法分割激光雷达扫描线在地面上的投影,通过小波变换初步确定路沿和障碍物位置,再使用模糊线段的方法精确定位路沿和障碍物。试验结果表明,该方法具有较高的精度与实时性。
1 前言
无人驾驶车辆是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车[1]。无人驾驶车辆通常装有由激光雷达和摄像头组成的传感器系统,用于识别障碍区域和道路区域。基于机器视觉的检测方法数据量大,可较好地对目标进行分类与检测,但机器视觉易受到外部环境的影响,激光雷达对外部干扰的鲁棒性强,而且对纵向运动目标的解析度高,测距范围大、视野更广。目前,三维激光雷达在无人驾驶车辆上得到了广泛应用[1]。现有的三维激光雷达道路分割算法通常将原始数据网格化或无向图化。基于网格的道路分割算法将三维点云聚类到网格中,通过分析每个网格中的三维点云特性确定该网格的属性。Kammel[2]提出一种基于网格中点云最大高度差的道路检测方法;Himmelsbach等[3]将三维点云以极坐标的形式网格化,分离道路与障碍物区域。此类方法使得原始数据细节大量丢失,检测精度主要取决于网格大小,大量子网格内无数据,造成存储空间和处理时间的浪费。基于无向图的道路分割算法主要在每个数据点与相邻点之间建立领域系统,使得对三维点云的处理转化为图像处理。Moosmann等[4]根据区域增长法分割点云图像,得到道路区域;Montemerlo等[5]使用三维数据环之间的距离判断单个三维点是否属于地面区域。相比于网格算法,基于无向图的算法保留所有原始数据,精度更高,但运算量大。本文提出一种新的算法,在满足高精度要求的同时,处理扫描单线的运算速度快,可满足实时性要求。
2 算法综述
2.1 算法流程
本文采用16线Velodyne三维激光雷达VLP-16,安装在车辆顶部。为分析道路区域连续性特征,首先剔除高度信息,将所有三维点云投影至地面,最终得到的可通行区域是该平面内的部分区域。本文仅分析车辆前方的道路情况,受VLP-16的精度限制,距离过远处单线间隔过大,可能漏检障碍物导致检测失效。因此,仅保留原始三维数据中车辆前方20 m及左、右侧各10 m的数据点,规定三维激光雷达所在点为(0,0),无人驾驶车辆前方为x轴正方向,某帧实际场景如图1所示。

图1 数据点云在地面上的投影
由图1可知,路沿处及障碍物区域与可通行道路区域有明显差异,每条扫描线在可通行道路区域光滑连续,在路沿处和障碍物区域呈断开或折角状态。将图1进行人工特征标记,结果如图2所示。
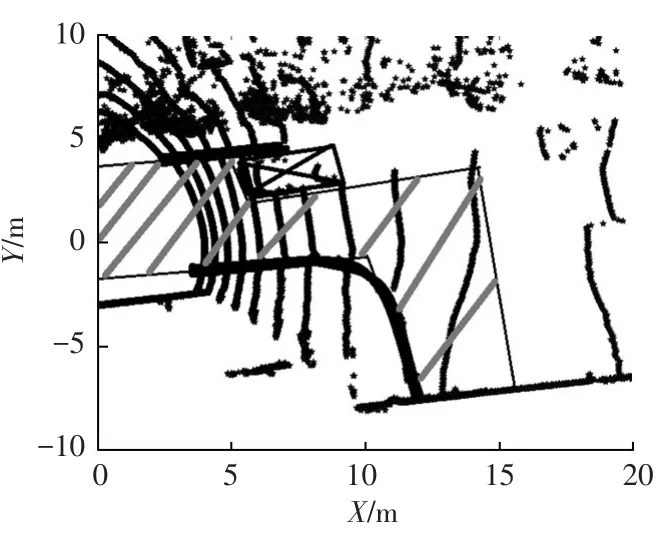
图2 道路分割人工标记结果
图2中人工标记的矩形框为道路区域的障碍物车辆,线段加粗部分为路沿,多边形框内为理想的可通行区域,必须在此区域内规划轨迹。为得到该区域,需将每条扫描单线切割提取。据此,本文提出基于扫描单线的障碍物及路沿特征提取算法,流程如图3所示。其中,三维激光雷达原始数据的预处理包括解析数据包、修正坐标偏移、提取有效范围内的数据点等。
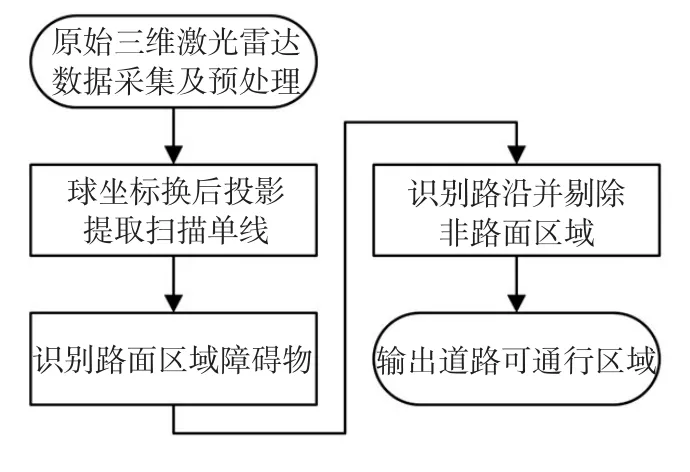
图3 算法流程
2.2 扫描单线提取
VLP-16三维激光雷达垂直测量角度范围为30°(-15°~15°),垂直方向角分辨率为2°,水平方向角分辨率为0.2°。将获得的笛卡尔坐标系下的点云数据转换至球坐标后,得到所有点的仰角值,理论上仰角值相差不小于2°的点属于不同单线。依据仰角值由低到高聚类,不同点的仰角值相差足够小(本文设为0.5°)时可认为属于同一单线。图1中数据点经过极坐标(ρ,θ)变换聚类处理后得到若干个单线集,如图4所示。极坐标变换时,原点不变,x轴正方向对应θ=0°方向,y轴正方向对应θ=90°方向。
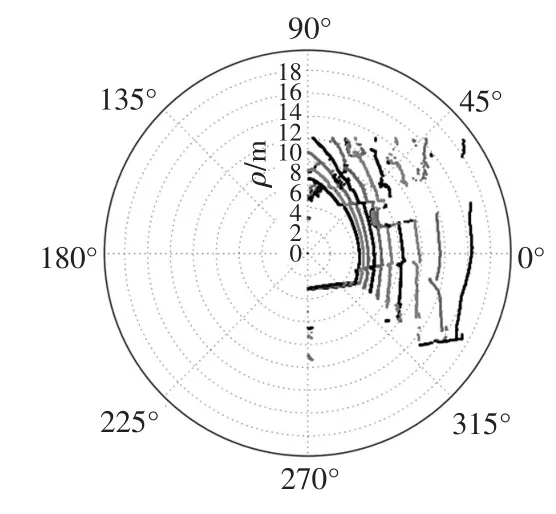
图4 单线提取
提取单线后,将单线中数据点按照方位角逆时针排列,建立方位角序列与点到三维激光雷达中心距离的函数关系,如图5所示。分析每条单线定位突变点并剔除不平滑的线段,再识别路沿,定位可通行的道路区域。
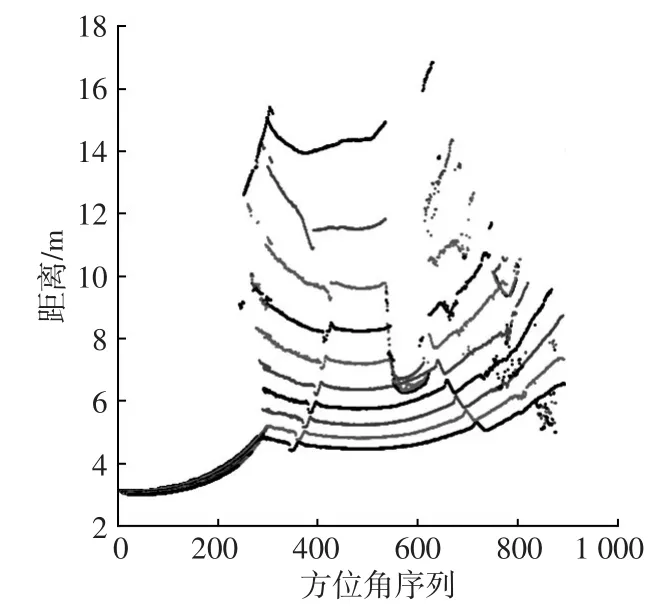
图5 扫描线上点的方位角序列与距离的关系
3 道路分割提取
3.1 小波变换识别道路障碍物
扫描单线经过小波变换后,利用小波系数进行描述,小波系数表现出原始信号的信息和特性,信息的局部特征可以通过处理小波系数改变。考察小波变换与信号突变性的关系,一般用小波变换后的模极大值在不同尺度上的衰减速度衡量信号的局部奇异性[6]。
若小波函数ψ(t)是连续的实函数,其衰减特性为:

式中,K和ε为常数。
式(1)表明小波函数具有快速衰减性。
信号f(t)∈L2(R)在区间I上存在一致Lipschitz指数α(-ε<α≤1),则存在常数c>0,使对任意a,b∈I,其小波变换满足:

式中,(Wf)(a,b)为f的小波变换。
反之,如果对于某个α(-ε<α≤1),f(t)∈L2(R)的小波变换满足式(2),那么f在I上存在一致Lipschitz指数α。设t0为f(t)的突变点,则|(Wf)(a,b)|在b=t0处取得极大值,此时式(2)中的等号成立。
由式(2)可知,如果α>-0.5,则小波变换的模极大值会随尺度j的增大而增大,如果α<-0.5,则小波变换的模极大值会随尺度的增大而减小。所以,可通过小波变换的模极大值随尺度的变化情况判断信号突变点类型。
信号的突变点检测是对原始信号在不同尺度上光滑处理,对处理后的信号的一阶或二阶导数进行极值点检测[7]。对信号的光滑过程采用的光滑函数一般用θ(t)表示,常用Gaussian函数或者Coiflets函数。一般地,光滑函数满足:

式中,θ(t)为Coiflets函数。
由卷积的性质可得到:
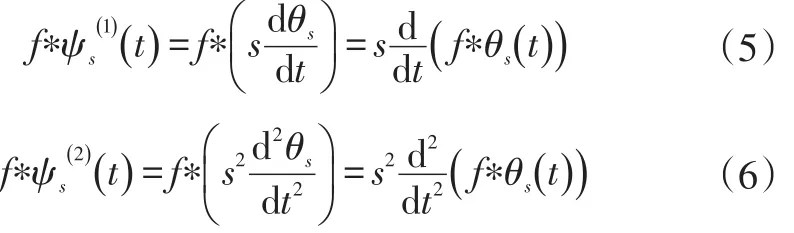
式中,卷积f∗θs(t)为平滑算子,表示f(t)经过算子运算后的函数。
由此可知,小波变换(Wf)(s,t)=f∗ψs(1)(t)与f∗θs(t)的一阶导数成正比,而(Wf)(s,t)=f∗ψs(2)(t)与f∗θs(t)的二阶导数成正比,说明在选取光滑函数θs(t)后,原始信号的突变点可以通过检测小波变换f∗ψs(1)(t)和f∗ψs(2)(t)的模极大值获得。在实际应用中,仅在1个尺度下检测突变点常常很难确定突变点位置,所以需要进行多尺度检测,只有在多个尺度上均为极值点的位置才能确定为突变点所在的准确位置[8]。对于小波的多尺度分析,常常使用重构的快速算法,即Mallat算法[9]。
将每条单线上的点与雷达中心的距离数据集作为Mallat算法的输入,利用coif5小波对信号进行分解,得到细节信号,可知突变点包含在多尺度细节信号cD中,与原始信号突变点同步。选取包含车辆障碍、路沿信息以及墙壁障碍的单线(图4中单线距离由近到远排列情况下的6号单线)分析,如图6所示。
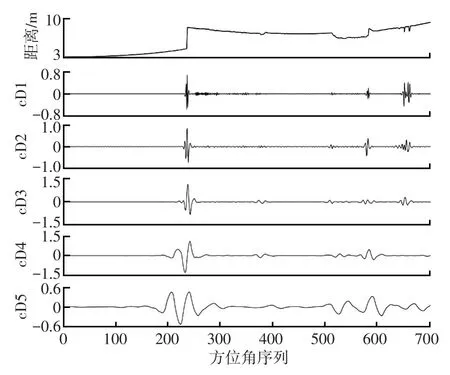
图6 小波变换细节信号
根据不同尺度下的模极大值找到突变点以及路沿处光滑度较低的区域分割单线。其中障碍物边界为突变点,通过小波变换可精确定位,实际道路由于路沿较矮,存在破损导致路沿处曲线突变程度不够明显,只能确定路沿范围,本文采用模糊线段的方法精确定位路沿。
3.2 模糊线段拟合识别路沿
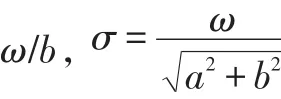
二维离散点集拟合模糊线段的参数可通过增量识别模糊线段宽度结合凸包络边界线获取[10]。为了提高识别速度,根据试验数据给定优化的初始值。拟合识别算法流程为:
a.将扫描单线根据方位角序列输入,逐点计算当前点与序列中前一点的距离d。若d≥Td,则将前一点作为当前模糊线段的终点,当前点作为新一条模糊线段的起点,模糊线段在此处断开;若d<Td,则将该点添加进入前一点所在的模糊线段,重新计算上、下包络平行直线并得到模糊线段宽度,如果该宽度大于设定的阈值Tσ,则将该点作为新的模糊线段的起点,前一个点作为上一条模糊线段的终点。
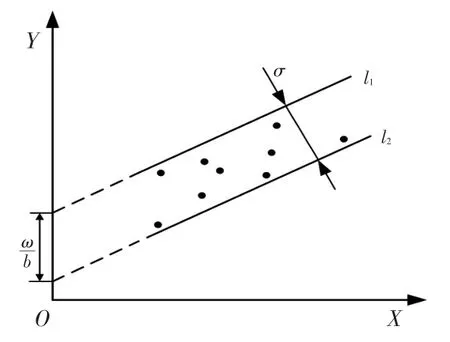
图7 模糊线段概念示意
b.每条扫描单线完成模糊线段分割后,将相邻2条模糊线段的包络平行直线斜率差值小于阀值Te(经验值)且凹凸性相同的模糊线段归并为同一条模糊线段,由此将多段较为平滑的模糊线段连成同一条曲线。
三维激光雷达每条扫描单线与雷达中心的距离不同,但具有相同的水平角分辨率,因此每条模糊线段的阀值Td与Tσ均为与模糊线段上点到雷达中心点之间的距离D(取模糊线段上所有点的平均值)相关的自适应参数。VLP-16实际运行频率为10 Hz,该频率下三维激光雷达的角分辨率为0.2°,同一扫描单线上相邻扫描点之间的距离理论上为0.2πD/180,阀值与该距离成正比,根据实际调试效果,本文中阈值使用经验值。图4中单线距离由近到远排列情况下的1号单线经模糊线段拟合后如图8所示。
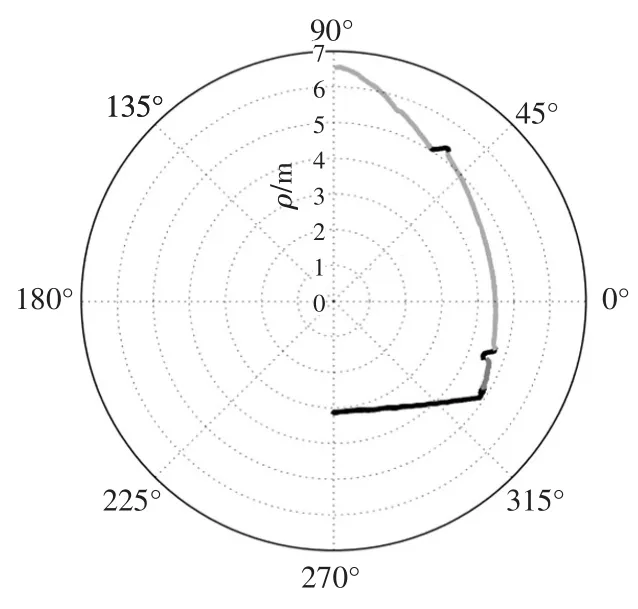
图8 扫描单线模糊线段拟合结果
3.3 道路分割提取结果
经过小波变换后,结合突变点之间线段点的高度信息剔除障碍物。将所有扫描单线分别通过模糊线段拟合的方式精确分割不同线段,道路两侧不平滑的点组成的模糊线段长度较短且不连续,舍去该部分后如图9所示。

图9 去除障碍物及两侧区域
在道路区域,扫描单线与雷达中心的距离随方位角变化较为平缓,在多尺度小波变换下细节信号cD变化较小,根据此特征提取道路信息如图10所示。
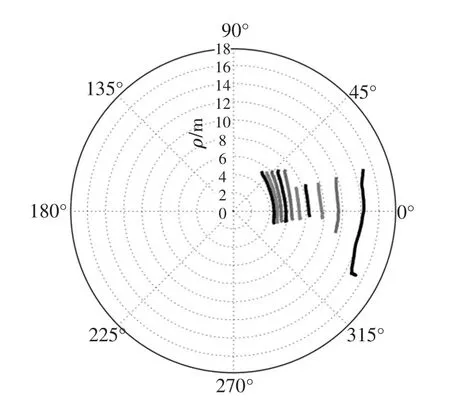
图10 可通行道路区域
经过多帧测试,本文提供的道路提取方法能在复杂场景下较平滑地提取道路曲线。校园道路上出现行人的可通行道路区域识别结果见图11,校园道路上停放多个车辆的识别结果见图12。
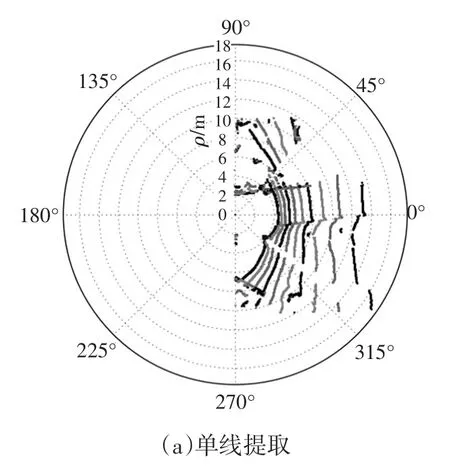
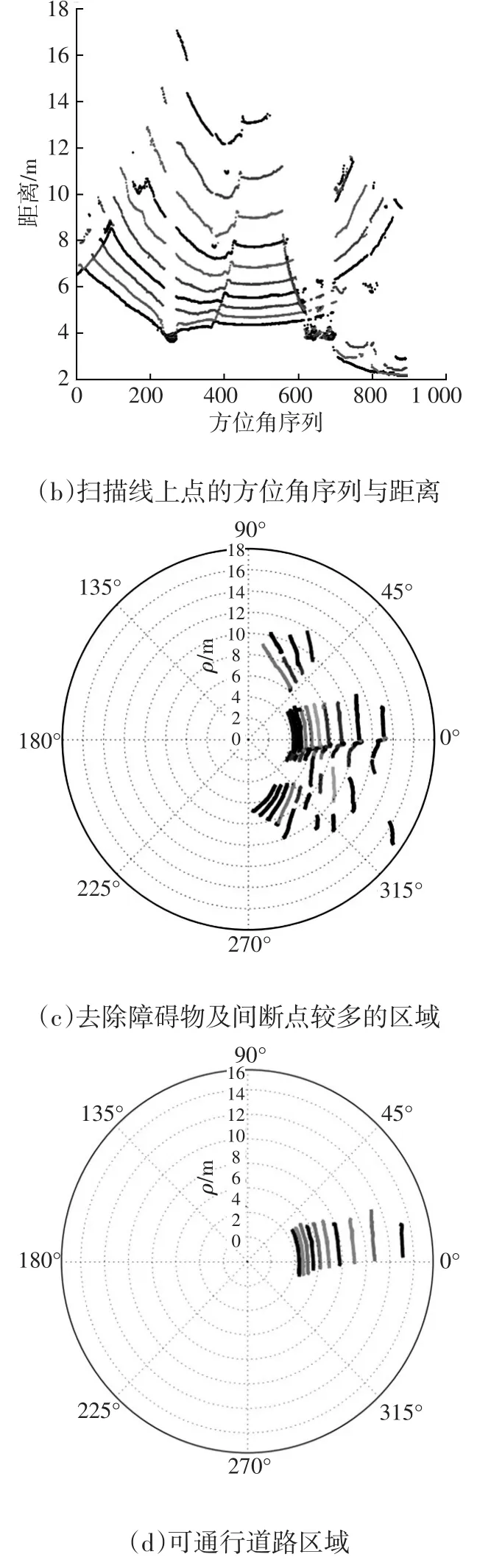
图11 算法识别结果I
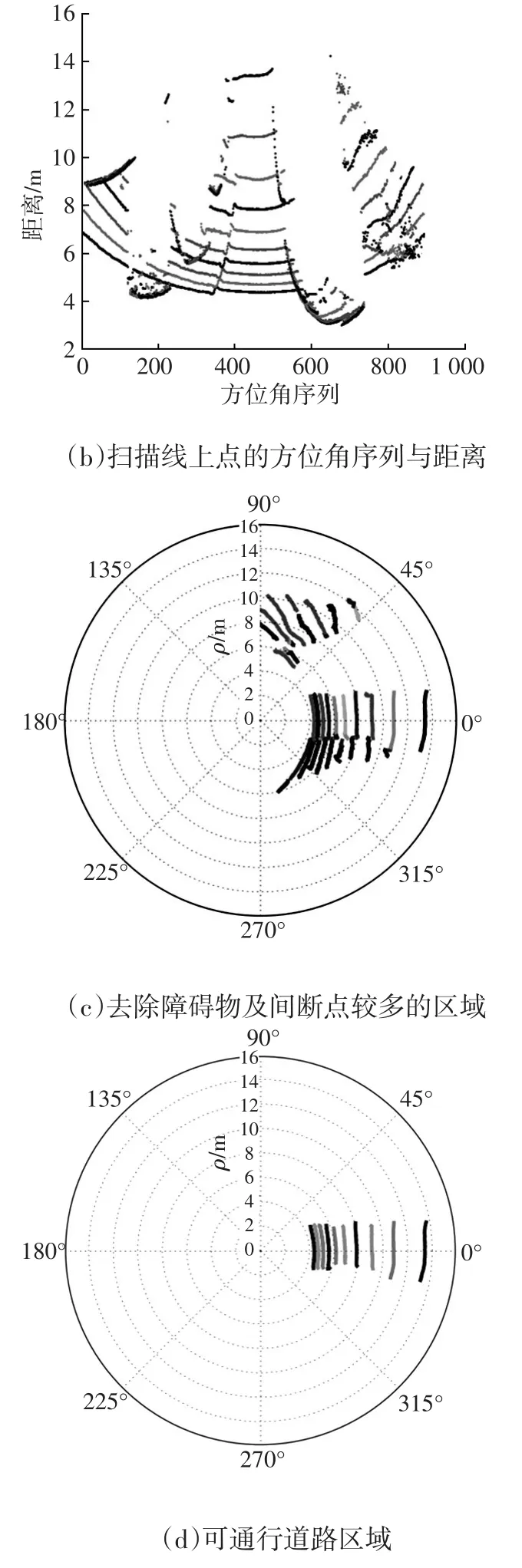
图12 算法识别结果II
4 试验结果
本文使用的无人驾驶试验平台如图13所示,三维激光雷达安装于汽车顶部,转向、制动、油门通过电子机械改装实现程序控制。道路分割提取算法在Ubuntu ROS操作系统上使用python实现,在车载电脑上运行。在校园道路上实测1 000帧,提取算法平均每帧耗时58 ms,单帧耗时最高72 ms,最低49 ms,低于三维激光雷达工作周期100 ms,满足实时性需求。
为分析分割提取算法的可靠性,需验证在连续多帧情况下每帧数据分割提取的准确率R,将算法结果与人工标记的真值进行量化对比:

式中,oi为每条扫描单线道路提取完整度,以提取长度占实际可通行道路长度的比值表示;ei为修正因子,若出现识别结果包含路沿或障碍物信息,则判定该条扫描单线识别失效;NA为每帧参与运算的扫描单线数目;Tw为布尔型数值,取1时表示该帧道路提取区域能够规划轨迹,取0时表示不能。

图13 无人驾驶自主平台
在校园道路实测1 000帧图像的人工标记结果中,有9帧无法进行轨迹规划,主要原因在于道路凹凸程度较大,导致扫描单线多处断开,断开部分判定为障碍物,使前方道路无法通行。其余帧均不影响轨迹规划,选取其中100帧计算分割提取的准确率R,平均值为98.7%,分割提取效果满足后续轨迹规划要求。理论上,道路凹凸不平导致扫描单线提取不完整时可以增大模糊线段拟合中参数的阀值,但由于测试道路路沿较低,这会导致路沿处分割不够准确,图14、图15所示为连续2帧的提取情况。
图14中存在2条扫描单线由于道路不平提取不够完整的情况。无人驾驶车辆经过不平坦道路,如果某一帧可通行区域提取不够完整,但依然能够规划局部路径,可减速行驶继续更新扫描线数据,直至出现新的完整道路可通行区域。在路面较平坦时,本文提出的算法具有很好的稳定性,路沿及障碍物识别准确,路面可通行区域提取完整度高。
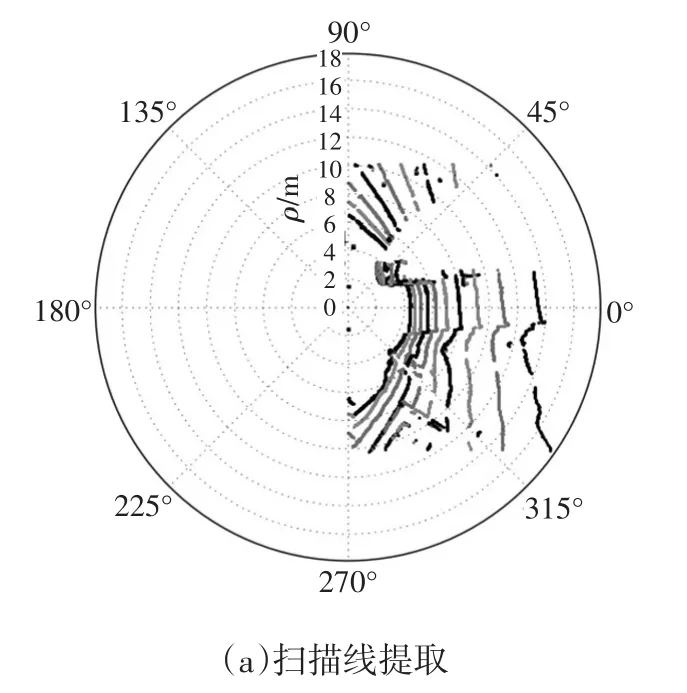
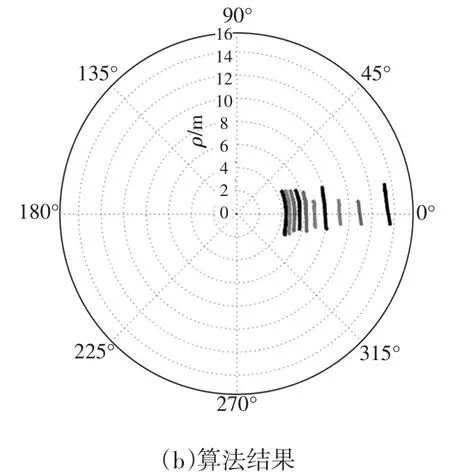
图14 当前帧提取效果
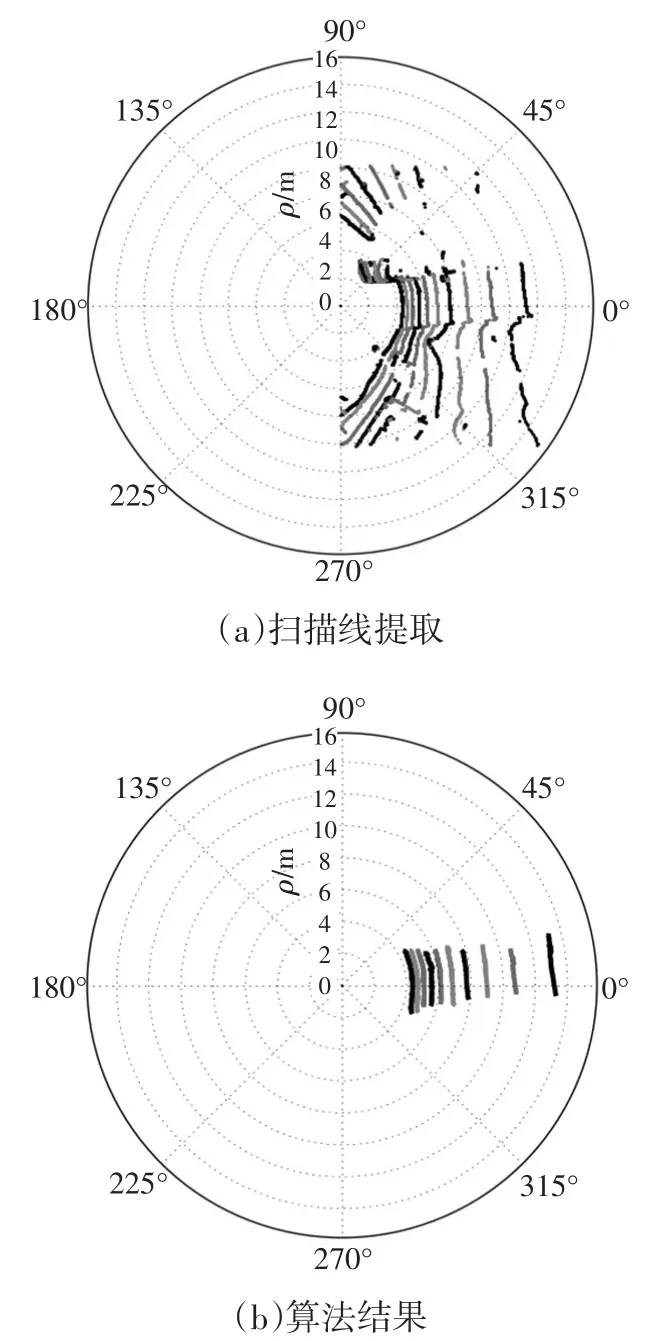
图15 下一帧提取效果
5 结束语
本文主要通过小波变换结合模糊线段拟合的方法分析三维激光雷达扫描单线信息,提取道路可通行区域。试验结果表明,该算法兼顾了高精度与良好的实时性,将道路可通行区域接入轨迹规划模块,通过校园道路实车测试,无人驾驶试验车能够在道路上自主避障行驶,具有良好的稳定性与实时性。由于算法需要依据路沿信息提取道路区域,对无路沿道路以及多车道的情况存在局限性,需融合其他传感器信息进一步完善无人驾驶算法。
1 段永利,侯蕴琦.无人驾驶汽车开辟新蓝海市场.中国信息界,2016(4):66~69.
2 陈慧岩.无人驾驶汽车概论.北京:北京理工大学出版社,2014.
3 Kammel S,Pitzer B.Lidar-based lane marker detection and mapping.IEEE Intelligent Vehicles Symposium,Eind⁃hoven,2008.
4 Himmelsbach M,Hundelshausen F V,Wuensche H J.Fast segmentation of 3D point clouds for ground vehicles.IEEE Intelligent Vehicles Symposium,La Jolla,2010.
5 Moosmann F.Interlacing Self-Localization,Moving Object Tracking and Mapping for 3D Range Sensors.Kit Scientific Publishing,2013.
6 张小飞,徐大专,齐泽锋.基于小波变换奇异信号检测的研究.系统工程与电子技术,2003,25(7):814~816.
7 孙云莲,刘敦敏.时频分析与小波变换及其应用.武汉大学学报:工学版,2003,36(2):103~106.
8 刁彦华,王玉田,陈国通.基于小波变换模极大值的信号奇异性检测.河北工业科技,2004,21(1):1~3.
9 王明祥,宁宇蓉,王晋国.基于Mallat算法的一维离散小波变换的实现.西北大学学报:自然科学版,2006,36(3):364~368.
10 Debled-Rennesson I,Feschet F,Rouyer-Degli J.Optimal blurred segments decomposition in linear time.International Conference on Discrete Geometry for Computer Imagery,Poitiers,2005.
(责任编辑 斛 畔)
修改稿收到日期为2017年3月2日。
Research on Extraction Method of Travelable Road Region Segmentation Based on 3D Laser Radar
Zou Bin,Rao Yang,Hou Xianjun,Wang Kewei
(Hubei Key Laboratory of Advanced Technology for Automotive Components,Hubei Collaborative Innovation Center for Automotive Components Technology,Wuhan University of Technology,Wuhan 430070)
In this paper,a new method based on wavelet transform in combination with blurred segment fitting line for road surface segmentation is proposed for the unmanned vehicle using on-board 3D laser radar to extract travelable road region segmentation.The projection of the laser radar scanning line on the ground plane is segmented by the method of detecting the inclination and clustering.Using wavelet transform to determine the location of the road and obstacles,and then the blurred segment method is applied to accurately locate the road and obstacles.The test results show that the method has high accuracy and real-time performance.
Unmanned vehicles,3D laser radar,Road segmentation,Wavelet transform,Blurred segment
无人驾驶车辆 三维激光雷达 道路分割 小波变换 模糊线段
U471.15;TP391.4;TP27
A
1000-3703(2017)06-0017-07
国家自然科学基金项目(51405359);武汉理工大学自主创新研究基金项目(2016-zy-031)。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
云南画报(2020年11期)2020-12-14
计算机与网络(2020年19期)2020-12-04
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
中小企业管理与科技·上旬刊(2019年1期)2019-02-18
好孩子画报(2019年10期)2019-01-10
建筑工程技术与设计(2015年6期)2015-10-21
