基于机器视觉的表贴芯片缺陷检测系统研究
2017-07-18 17:02王伟华李朋轩
无线互联科技 2017年12期
王伟华+李朋轩


摘 要:基于表贴芯片缺陷检测的需要,设计了一种基于机器视觉的表贴芯片缺陷检测系统,并对该系统的硬件和软件部分作了简要介绍,重点研究了芯片的引脚边缘检测算法,在此基础上实现了芯片长度、宽度和间距等特征参数的提取。测试结果表明,该检测系统能达到在线生产的工艺要求。
关键词:机器视觉;表贴芯片;缺陷检测
伴随着半导体技术和电子产业的蓬勃发展,芯片的缺陷检测技术在整个工业生产过程中扮演的角色也越来越重要。外观检测的方法有3种:(1)传统的人工检测方法;(2)使用激光测量技术进行芯片外观检测;(3)基于机器视觉的检测方法[1]。相对于前两种方法,基于机器视觉的表贴芯片缺陷检测技术作为一种灵活的、实时的、非接触式的、高精度的检测技术,应用也是日益广泛。在国内,由于对机器视觉技术应用研究起步较晚,虽然很多学者和研究机构都做了大量的研究,有了很多成果[2-4],但是目前相对技术比较成熟的机器視觉设备并不多见。本文主要是对基于机器视觉的表贴类芯片外观缺陷检测系统的相关技术进行研究,并将检测方法用于表贴芯片的检测,实验得到满意结果。
1 缺陷检测技术研究
1.1 图像边缘检测算法研究
图像的边缘是那些周围像素灰度有阶跃变化或屋顶变化的像素的集合。对于表贴芯片的缺陷检测而言,芯片引脚的边缘部分包含着大量的缺陷特征参数信息。本文使用改进的Canny算子作为系统的图像边缘检测算法[5]。
改进的Canny算子具体实现过程如下:
(1)使用二维高斯函数对图像进行平滑去噪处理,将原始图像中存在的高频噪声滤除。
(2)计算梯度的方向和幅值。在像素点的3×3邻域范围内计算x方向,y方向,45°方向以及135°方向一阶偏导数有限差分来计算像素梯度的幅值。
(3)对图像的梯度幅值进行非极大值抑制,得到单像素宽度的边缘。
(4)采用双阈值算法对图像边缘进行检测和连接。
改进的Canny算子边缘检测结果如图1所示。
1.2 缺陷特征参数计算
对表贴芯片的缺陷的研究发现,实际上不管是缺脚、位置偏移抑或是共面度缺陷等都可以通过测量一个引脚的长、宽或者相互之间的间距等参数来实现合理的判断。
1.2.1 引脚数目的计算
由于芯片引脚的位置特点,本文采用的是垂直灰度投影方法,具体思想是将引脚边缘图像中每一列的像素点的灰度信息在水平位置进行累加,最终得到引脚边缘图像在水平方向的灰度特征信息,通过对这些灰度特征的测量便可以得到图像的相关参数信息。
这里以SOP芯片上排引脚边缘为例说明,设定图像左下角为原点(0,0),图像上方起始为第一行。从原点(0,0)处开始遍历搜索引脚的灰度投影图像,具体步骤如下。
以左下角作为原点(0,0),从x=0开始,检查该行是否存在灰度值为0的像素点,如果存在,标记p1=x;否则检查下一列,直到找到p1为止。
然后从p1开始,继续搜索检查该行是否存在灰度值为0的像素点,如果不存在,标记p2=x;否则检查下一列,直到找到p2为止。
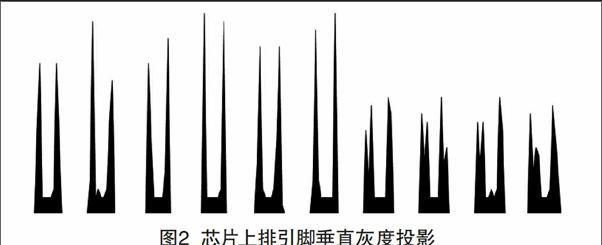
从p2开始扫描,继续检查该行是否存在灰度值为0的像素点,如果存在,标记p3=x;否则检查下一列,直到找到p3为止。此时统计p1和p2之间的距离a1即代表该引脚的宽度,p2和p3之间的距离b1即代表该相邻引脚之间的间距。依次类推,统计像素点的跳变次数便可以得到引脚的数目。芯片上排引脚垂直灰度投影如图2所示。
1.2.2 引脚宽度和间距的计算
实际上,在上一节求取芯片引脚数量时,统计p1和p2之间的距离an即代表该引脚的宽度,p2和p3之间的距离bn即代表对应的相邻引脚之间的间距。
1.2.3 引脚长度计算
通过研究发现,当对SOP芯片的引脚边缘图像进行二值化后,近似矩形的引脚边缘图像的上下两边基本为标准的直线,此时通过扫描计算上下两边之间的距离就可以得到引脚的长度。因此本文采用对SOP芯片的二值化后的引脚边缘图像进行扫描,计算引脚上下两边的纵坐标之差,求出单个引脚的长度L。
1.3 实验结果
使用上面的方法对本文的研究对象进行实验仿真,本文使用的芯片型为SP233ACT,得到该芯片的引脚宽度、引脚间距和引脚长度的实际数值,分别如表1,2,3所示。测试结果表明实验精度达到1 mm,其中引脚宽度和引脚间距的数值均在芯片参数允许范围内,芯片引脚长度与标准值的误差在1.43%~8.97。
2 结语
本文基于对图像边缘检测算法的研究,提出了基于机器视觉的表贴芯片缺陷检测系统。测试结果表明,本系统对SOP芯片基本特征参数可以实现准确检测,检测精度较高,整个系统的实时性良好,具有很好的应用前景。
作者简介:王伟华(1992— ),男,陕西宝鸡。
[参考文献]
[1]NEWMAN TS,JAIN AK. A survey of automated visual inspection[J].Computer Vision and Image Understanding,1995(2):231-262.
[2]郑金驹,李文龙,王瑜辉,等. QFP 芯片外观视觉检测系统及检测方法[J].中国机械工程,2013(3):290-294.
[3]刘建峰,李承峰.基于机器视觉的IC芯片外观检测系统[J].电子制作,2015(15):77-78.
[4]许龙.基于机器视觉的SMT芯片检测方法研究[D].西安:西安电子科技大学,2014.
[5]许宏科,秦严严,陈会茹.一种基于改进Canny的边缘检测算法[J].红外技术,2014(3):210-214.
Abstract: Based on the need of the defect detection of SMT chip, a defect detection system of SMT chip based on machine vision is designed, and the hardware and software part of the system are briefly introduced. The chip edge detection algorithm is studied, and the extraction of the characteristic parameters such as chip length, width and spacing is realized. The test results show that the system can meet the process requirements of online production.
Key words: machine vision; SMT chip; defect detection
猜你喜欢
科技创新与应用(2017年7期)2017-03-27
计算技术与自动化(2016年4期)2017-01-11
科教导刊(2016年25期)2016-11-15