
辅助PET-CT技师摆位系统的研究
2017-07-20 10:14吴锐先张宗鹏张国旭王治国
中国医学装备 2017年7期
吴锐先 王 宏 张宗鹏 张国旭 王治国*
辅助PET-CT技师摆位系统的研究
吴锐先①王 宏②张宗鹏①张国旭①王治国①*
目的:研究一种辅助正电子发射断层扫描-CT(PET-CT)技师进行摆位的系统,减少技师操作中所受辐射剂量,实现精准摆位,提高检查效率。方法:对比现有的PET-CT技师摆位方式,通过远程控制子系统控制PET-CT操控面板,代替技师进入PET-CT机房,减少技师与PET-CT受检者接触,并利用受检者位姿可视化子系统对受检者进行标准摆位。结果:辅助PET-CT技师摆位系统的应用,能够在最大程度地减少技师所受辐射剂量的同时实现对受检者进行精准摆位,避免重复扫描,节省时间,提高检查效率。结论:辅助PET-CT技师摆位系统可以减少技师所受辐射,提高摆位精度,具有一定的临床使用价值。
PET-CT技师;辅助摆位;位姿可视化;远程监控;辐射剂量
正电子发射断层扫描-CT(positron-emission tomography,PET-CT)是将高性能的PET与CT有机地集合在同一设备上,同时提供受检者在同一条件下的解剖结构图像、功能代谢图像及其融合图像的一种先进新型医学影像设备,PET-CT在肿瘤、心血管疾病和神经系统疾病方面表现出重要的应用价值与突出优势[1]。一次完整的PET-CT检查包括正电子显像剂的生产、根据受检者情况注射适量显像剂和休息一定时间后行PET-CT扫描。整个检查过程中,势必会造成操作技师、受检者及其周围环境的一定辐射影响[2-3]。相对于受检者,医务人员所受到的照射是来自多方面和长期的[4-5]。而PET-CT技师摆位时,会受到受检者这一开放源的照射。为了获得符合诊断要求的图像,技师在进行摆位时与受检者接触时间相对较长,使其自身受到不同程度的辐射。为了对受检者进行精准摆位、减少技师所受辐射,本研究对辅助PET-CT技师摆位系统进行研究探讨。
1 PET-CT技师摆位方式现状
目前,沈阳军区总医院核医学科PET-CT显像使用的仪器为美国GE公司Discovery VCT。由于设备厂商在设计时将设备控制面板固定在设备上,在PET-CT控制室无法对设备进行控制,而导致以下问题。
(1)PET-CT技师在为受检者摆位时必须进入PET-CT机房,与受检者这一放射源直接接触,使技师接受不必要的辐射。
(2)技师为了获得符合诊断要求的图像,在进行摆位时与受检者接触时间相对较长,造成自身受到了更多的辐射伤害。
(3)目前行PET-CT显像多为18F氟代脱氧葡萄糖(18F-flurodeoxyglucose,18F-FDG)全身显像,为避免双臂影响,先将双臂上举进行躯干扫描,再将双臂放于胸腹部进行头部扫描。由于扫描时间长,双臂下移时会造成技师最初的标准摆位发生变化,影响图像质量和延长扫描时间,从而增加后续受检者等待时间。对于进行PET-CT检查的受检者,技师需要至少3次(在受检者上检查床后进行标准摆位,在双臂下移后确保头部摆位标准,在检查结束时退检查床)进入PET-CT机房,也会增加后续受检者等待时间。而受检者行18F-FDG PET-CT检查当日不允许进食,等待时间过长有可能造成受检者的烦躁情绪,加大医患之间的摩擦。
2 辅助PET-CT技师摆位系统设计
为了解决传统PET-CT技师摆位的问题,本研究结合PET-CT摆位的特点及各项要求,设计开发了一种辅助PET-CT技师摆位的系统,该系统包括位姿可视化、远程控制和以受检者为中心的远程友好对话子系统。
2.1 位姿可视化子系统
该系统包括高清摄像头、监控盒、显示器以及对话装置,采用3个高清摄像头来采集相应受检者正前方、左侧及右侧(受检者仰卧位)影像。通过观察影像,配合激光灯、进出床以及对话系统来确保受检者位置是否标准。受检者位姿可视化子系统如图1所示。

图1 受检者位姿可视化子系统结构图
2.2 远程控制子系统
该系统分为机房端与控制室端。机房端使用机械手臂来代替PET-CT技师的手,进行PET-CT设备上控制面板中的升床、降床、出床、进床、一键出降床、激光灯的开关和“0”点设置等动作;而控制端则是在电脑上安装相应的面板控制软件,通过技师点击相应的控制键来远程控制机房端机械手臂的动作。远程控制子系统如图2、图3所示。

图2 远程控制子系统流程图
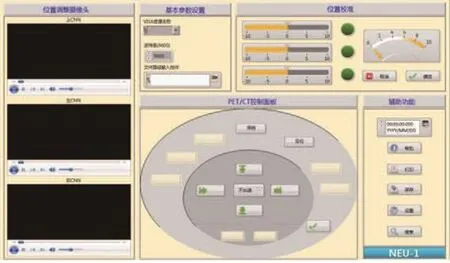
图3 远程控制子系统人机交互界面图
2.3 远程友好对话子系统
系统在控制室端研发了可供医务人员与受检者进行远程对话交流的子系统,该系统根据受检者位姿可视化信息,实现医患之间的交流,医务人员可以直接聆听受检者的声音,与受检者进行友好对话。
3 辅助PET-CT技师摆位系统的应用
在辅助PET-CT技师摆位系统使用之前,技师必须每进行一位受检者的PET-CT检查就要进入PET-CT机房多次,不仅增加了自身所受到的辐射剂量,还增加了后续受检者的等待时间。在辅助PET-CT技师摆位系统使用之后,PET-CT检查所受辐射得到改善。
(1)技师通过摆位系统调整患者的姿势,无需直接接触受检者,所受辐射极大减少。
(2)每位受检者按照标准体位进行检查,获得了高质量的图像,利于医生做出正确的诊断。
(3)辅助摆位系统使用前受检者因体位不标准需重新扫描,使用后能避免重新扫描而节省时间,减少后续受检者的等待时间,使每位受检者都能尽快进行检查。
4 讨论
PET-CT技师进行摆位时可以使用各种防护措施,如可移动的辐射防护铅屏风、铅防护服等,以降低技师受照剂量,但技师仍然会受到照射[6-7]。王彬等[8]研究认为,PET-CT技师所受年累积辐射剂量当量为(1.37±0.87)mSv;Pant等[9]研究表明,一次PET-CT检查对技师造成的平均辐射剂量当量为0.62 μSv,以受检者为10人/d、20 d/月计算,PET-CT技师一年所受辐射剂量当量为1.488 mSv,虽然已经低于放射工作人员所受剂量限值,但还是有一定的辐射[10]。辅助PET-CT技师摆位系统使用3个月以来,受到了操作技师的肯定,技师可以在几乎无辐射的环境下进行工作,因此辅助摆位系统的使用可以减少技师所受辐射剂量,同时也提高了检查效率、确保了图像质量,有利于建立和谐的医患关系。
4.1 使用中存在的问题
(1)机械手臂的控制精度问题。由于机械手指在行动过程中处于匀速状态,使得在控制检查床移动时幅度过大,需要技师长时间练习才能控制自如。
(2)远程控制子系统机房端后坐力问题。由于机械手臂在按键时有后坐力,加上地面本身地胶防滑度差,一段时间后机械手臂离控制面板距离有偏差,造成机械手臂的控制精度更差。
4.2 解决方案
为解决控制精度的问题,将机械手指的按压力进行量化,在机械手指上增加了压力感应器,使得机械手指在给出能让设备控制面板按键产生相应效果适当的力之后不再加力,这样可以在需要停止时第一时间停下来,解决了控制精度问题。同时,在远程控制子系统机房端底座上增加可加锁的万向轮来增加摩擦,配合增加了力感应器的机械手臂(后坐力极大减少),解决了后坐力问题。
5 结语
辅助PET-CT技师摆位系统能够实现技师在“零辐射”的情况下进行工作,在提高图像质量的同时可减少受检者的等待时间,不但得到PET-CT技师的认可,并且有利于建立和谐的医患关系,具有较好的临床推广意义。
[1]Delbeke D,Coleman RE,Guiberteau MJ,et al. Procedure guideline for tumor imaging with18F-FDG PET/CT 1.0[J].J Nucl Med,2006,47(5):885-895.
[2]Nunes ATC,Vaz P,Madeira P.Dose optimization in CT,in Nuclear Medicine and in PET-CT procedures[C].Bioengineering,IEEE,2011:1-6.
[3]Boice JD Jr.Implications of radiation dose and exposed populations on radiation protection in the 21st century[J].Health Phys,2014,106(2):313-328.
[4]喻洁.PET-CT辐射环境与放射工作人员剂量研究[D].武汉:中国地质大学,2012.
[5]黄鹤,周文珊,周静,等.PET-CT中心工作人员受照剂量估算[C].全球华人辐射研究大会,2011.
[6]DEVINE CE,MAWLAWI O.Radiation safety with positron emission tomography and computed tomography[J].Semin Ultrasound CT MR,2010,31(1):4-15.
[7]Guillet B,Quentin P,Waultier S,et al.Technologist radiation exposure in routine clinical practice with18F-FDG PET[J].J Nucl Med Technol,2005,33(3):175-179.
[8]王彬,钱爱君,姚杰,等.上海市医疗机构正电子发射断层显像/X线计算机体层成像仪(PET/CT)工作人员受照剂量调查[J].环境与职业医学,2009,29(9):548-555.
[9]Pant GS,Senthamizhchel van S.Radiation Exposure to Staff in a PET/CT Facility[J].Indian Journal of Nuclear Medicine,2006,21(4):100-103.
[10]李雨玲,李婕,葛晓乾,等.放射医务人员辐射防护现状分析[J].中国医学装备,2015,12(2):23-25,26.
Study on the position system for assisting PET-CT technologist/WU Rui-xian, WANG Hong, ZHANG Zong-peng, et al//China Medical Equipment,2017,14(7):41-43.
Objective: To study a position system for assisting positron-emission tomography PET-CT technologists so as to reduce the
radiation dose of technologist, achieve precisely position and enhance the efficiency of examination. Methods: Compared to the current method of PET-CT technologist, the new method controlled the operative panel of PET-CT through remote controlling subsystem, and it substituted the operation of technologist in PET-CT room. This method could reduce the touch between the technologist and patient received cure of PET-CT and its posture visualization subsystem positioned the standard place for patient. Results: The system could reduce the received radiation dose of technologist at the greatest extent, and it could realize the precise position for the patients, avoid repetitive scan, save time and increase the efficiency of inspection. Conclusion: The position system for assisting technologist can reduce the received radiation of the technologist and increase the precision of the placement. It is worthy to be used in clinical practice and be generalized.
Technologist of PET-CT; Assisted Positioning; Posture visualization; Remote control; Radiation dose
Department of Nuclear Medicine, The General Hospital of Shenyang Military, Shenyang 110840, China.
吴锐先,男,(1983- ),硕士研究生,工程师。沈阳军区总医院核医学科,研究方向:生物医学工程。
10.3969/J.ISSN.1672-8270.2017.07.010
2017-02-13
1672-8270(2017)07-0041-03
R812
A
①沈阳军区总医院核医学科 辽宁 沈阳 110840
②东北大学机械工程与自动化学院 辽宁 沈阳 110819
*通讯作者:wangzhiguo5778@163.com
猜你喜欢
汽车维修与保养(2021年12期)2021-03-08
汽车维修与保养(2020年10期)2021-01-22
健康必读(上旬刊)(2020年11期)2020-12-28
中国惯性技术学报(2020年4期)2020-12-14
幸福家庭(2020年15期)2020-11-23
汽车维修与保养(2020年4期)2020-07-18
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
红领巾·探索(2020年2期)2020-05-19
中西医结合心血管病杂志(电子版)(2019年31期)2019-12-20
电子技术与软件工程(2019年6期)2019-04-26
