太空发电站大型柔性结构控制系统设计
2017-08-17 12:02刘宇飞侯欣宾
载人航天 2017年4期
刘宇飞,侯欣宾,王 立,周 璐
·柔性结构机构设计与应用·
太空发电站大型柔性结构控制系统设计
刘宇飞,侯欣宾,王 立,周 璐
(钱学森空间技术实验室,北京100094)
太空发电站作为千米级空间超大尺度柔性结构,针对其超长梁和膜结构的三轴稳定姿态控制以及地球静止轨道的定点运行,设计了一套姿态轨道控制系统。首先运用等效简化的方法将主次桁架结构进行简化,建立了简化模型,进而利用简化模型的模态信息实现了多柔性体动力学建模。分析了大尺度柔性结构在姿态和轨道方面所受到的空间扰动,主要包括太阳光压摄动、重力梯度摄动等因素,并据此设计了以电推进器为执行机构的三轴稳定的姿态控制系统和分散式的轨道控制系统。仿真估算结果表明,控制系统能够满足姿态、轨道控制要求,但燃料消耗较大。
太空发电站;超大尺度柔性结构;多柔性体动力学;姿态轨道控制
1 引言
太空发电站是一种在空间将太阳能进行收集转化,并通过无线方式传输至地面的空间系统[1⁃2]。为了实现高效、大功率的目的,结构尺度一般在千米量级,重量在万吨量级。现在国内外已经提出几十种太空发电站概念构想[3],总的来说可以分为两大类:一类是非聚光式[4],另一类是聚光式[5⁃7]。太空发电站为了实现其功能,一般选择地球静止轨道,姿态方面则需要太阳电池阵对日定向,或者聚光系统对日定向,无线能量传输系统对地定向。由于太空发电站是常规卫星规模的千倍以上,在设计其姿态轨道控制系统时,需要针对柔性结构特性和较大空间环境力矩等进行考虑。常规卫星集中式的控制方式也不再适用,需要考虑分散式的执行机构与敏感器布局。已有的太空发电站研究主要集中在方案设计层面,缺乏更细致的分析。
本文结合钱学森空间技术实验室研究团队设计的非聚光式GW级太空发电站方案,分析其环境扰动力矩,采用等效方法简化多柔体动力学模型,设计姿态轨道控制系统,以实现超大尺度空间系统的三轴稳定姿态控制和轨道保持。
2 非聚光式太空发电站
钱学森空间技术实验室提出的非聚光式GW级太空发电站方案如图1所示。此方案采用一字形结构,两侧为太阳能电池阵,单个太阳能电池阵面积为1 km,采用一字形,总面积为6 km2;中间为微波发射天线,直径为1 km;太阳能电池阵主桁架和子阵桁架都采用可展开桁架结构。太空发电站每一部分的质量如表1所示。
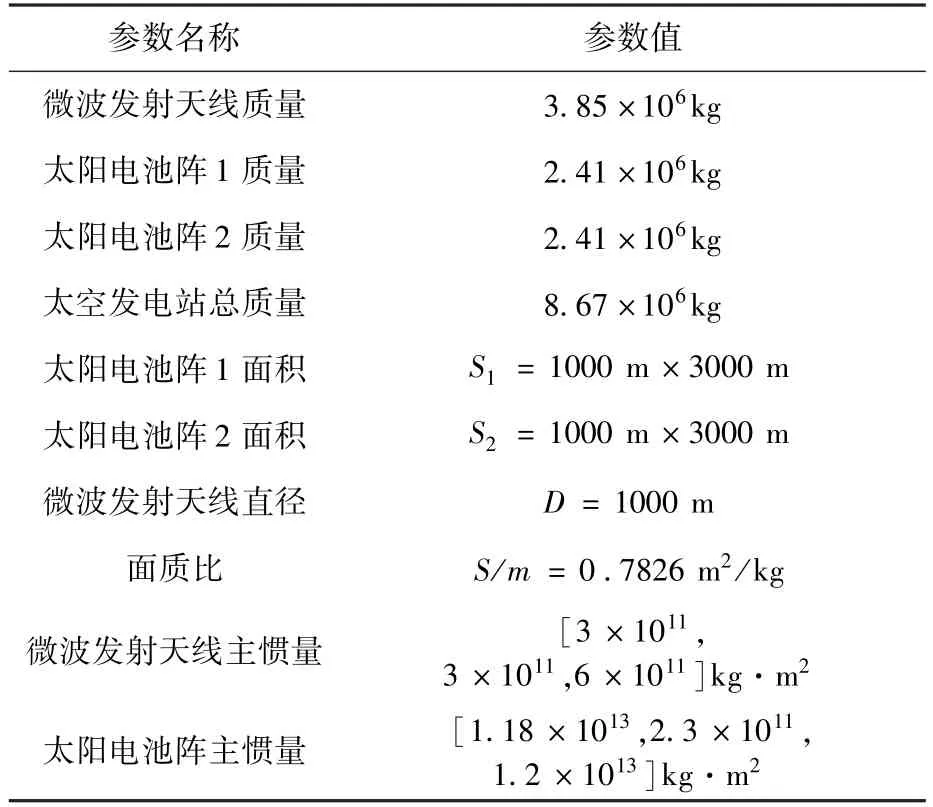
表1 太空发电站几何尺寸和质量特性Table 1 The dimension and mass characteristics of the SSPS
根据表1数据,太空发电站的质量为8Ʊ 67× 106kg,面质比为0Ʊ 7826 m2/kg,光压系数为0Ʊ 1。由于太阳能电池阵需保证实时指向太阳,故微波发射天线法向与太阳能电池阵法向存在周期性变化的夹角。设定初始位置是指太阳能电池阵和微波发射天线法向方向一致时的相对位置,按表2中设定工况可以得到太空发电站总惯量。

表2 太空发电站总惯量Table 2 The moment of inertia of the SSPS
可见,当太阳能电池阵的转轴通过微波发射天线质心并与微波发射天线主轴重合时,在太阳能电池阵转动过程中太空发电站主惯量变化较小,但由于太阳能电池阵与微波发射天线的主轴不重合,因此,太空发电站的惯量积不为零,且数值较大不能忽略。
3 太空发电站多柔体动力学建模
太阳能电池阵支撑结构采用可展开桁架结构。电池阵和微波发射天线模型如图2所示。由于太空发电站尺寸巨大且以可展开式主、次桁架为主体结构,因此在用有限元进行超大部件结构特性分析时,准确模型单元节点过于庞大,存在构造复杂、耗时较长等不利因素,因此需要采用简化方法。通过将主次桁架结构简化为具有等效轴向刚度、等效弯曲刚度及等效剪切刚度的等效实腹梁、柱和支撑的方法,简化建模难度,从而可以利用简化模型的模态信息实现柔性体建模[8]。
用四边形主桁架和三角形子桁架等效参数建立电池阵、天线阵等效模型,进行自由模态分析,提取前7阶振型频率,电池阵结果如表3所示。
考虑刚柔耦合效应的影响,首先在柔性构件上建立起一个浮动坐标系,将构件的位形认为是浮动坐标系大范围的运动与相对于该坐标系弹性变形的叠加,提出用大范围浮动系的刚体坐标与柔性体的节点坐标(或模态坐标)建立动力学模型的方法,这种混合坐标方法在工程上应用比较广泛[9]。具体柔性体建模流程如图3所示。
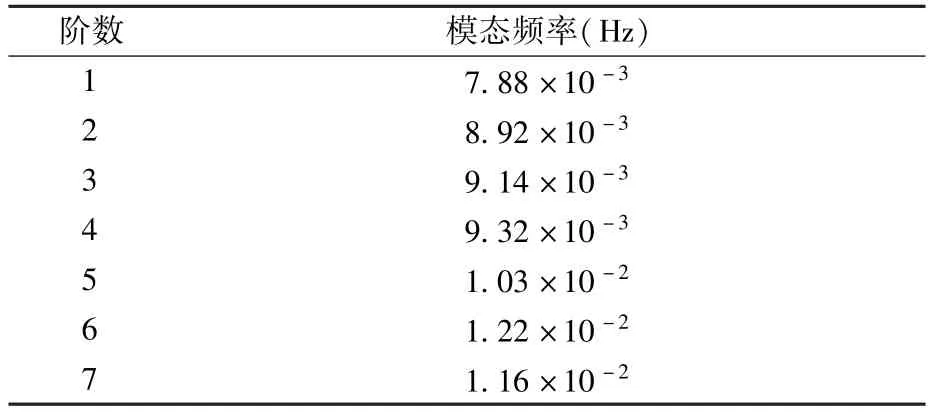
表3 电池阵前7阶振型频率Table 3 The first seven order modal frequencies of thearray
建模过程主要包括:
1)刚性体模型建立(电池阵、天线)
太空发电站两侧为太阳能电池阵,中间为微波发射天线,电池阵与微波发射天线之间通过单自由度刚性铰接方式连接;电池阵与微波发射天线间存在30 m长的刚性杆。
2)部件柔性信息加载
分别取剔除刚性模态后的6阶模态,并在表面节点添加分布力,用以添加太阳光压。
3)添加干扰力矩
重力梯度力矩:以力矩形式分别加载到电池阵和微波发射天线质心处。
太阳光压:以分布力形式均匀加载到电池阵模态中性文件各节点处。
4)设置测量位置,作为动力学模型输出
输出量包括:天线对地定向三个轴向角度偏差、角速度偏差;电池阵转动角度、转动角速度;电池阵末端变形量;电池阵与微波发射天线铰接关节处滚转轴、偏航轴应力。
5)设置动力学模型输入量
输入量包括:电池阵和微波发射天线所受重力梯度力矩;电池阵对日定向电推力器推力;天线对地定向三轴电推力器推力。
4 太空发电站所受空间扰动分析
4Ʊ 1 姿态扰动
1)重力梯度力矩
当航天器有小姿态角的情况下,重力梯度力矩可以简化为式(1)[10]:
式中:Tdgx、Tdgy、Tdgz分别代表滚转轴、偏航轴和俯仰轴的重力梯度力矩分量,带有角标的I为转动惯量矩阵中的各个分量,静止轨道角速度为ωo=7.29×10-5rad/s。由于天线对地定向姿态偏差较小,故给出滚转角φ、俯仰角θ各1°时的重力梯度力矩为:Tdgx=1Ʊ 23×104N·m,Tdgy=214 N·m,Tdgz=1Ʊ 1 N·m。
2)太阳垂直照射下的光压力矩
单个太阳能电池阵受照面积S=1000 m× 3000 m,反射系数ν取为0Ʊ 1,光压常数P=4.5× 10-6N/m2,则光压力为Fr=P(1+ν)S=14.85 N。光压力矩Tdr=Lr×Fr,太阳光压作用力臂Lr=2030 m。表4为理想情况下给出的最大光压力。
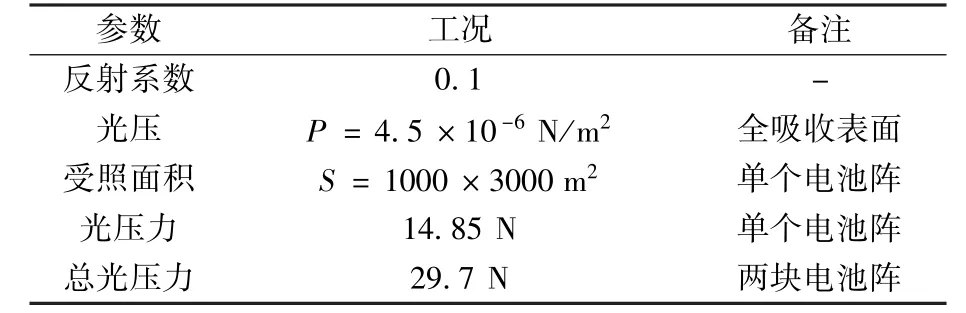
表4 太阳垂直照射下单个太阳能电池阵所受的光压力Table 4 The solar radiation pressure force on array
当太阳帆板的结构相对航天器质心不对称时,就会使得质心与压心存在偏差,从而产生附加力矩,表5所示为不同偏差所带来的影响,此时太阳光垂直照射太阳能电池阵。

表5 天线和电池阵质心存在偏差时产生的附加光压力矩Table 5 Solar radiation torque on SSPS when center of mass of antenna and array has bias
由计算结果可知,太阳光压力矩对滚转轴和偏航轴的影响最大,微波发射天线对地定向控制受太阳光压力矩干扰。如果能在结构上令太阳能电池阵的转轴通过太阳能电池阵和微波发射天线的质心和压心,就可以减小太阳能电池阵对日定向控制的干扰力矩,减少能量损耗。
4Ʊ 2 轨道扰动
轨道受摄动因素的影响会产生周期变化,主要考虑太阳光压摄动,地球非球形摄动和日月引力摄动等三种主要因素。
从图4可看出,当太空发电站运行大约2Ʊ 7天时,其经度偏离定点经度的度数已经达到了0Ʊ 1°。图5为一年中纬度变化趋势,在45Ʊ 9天左右时纬度偏差达到了0Ʊ 1°,并且偏差仍会一直增加。
5 姿态轨道控制系统设计分析
5Ʊ 1 控制力需求分析
对日定向时,由于太阳能电池阵只有俯仰轴方向上的自由度,故对日定向姿态控制只对俯仰轴进行控制。控制力矩主要用于抵消周期性重力梯度力矩及常值太阳光压力矩,调整对日定向偏差产生的控制力矩较小。对地定向条件下,由于滚动轴和偏航轴天线定向与电池阵耦合,且存在角度偏差后重力梯度力矩较大。具体控制力需求如表6所示。
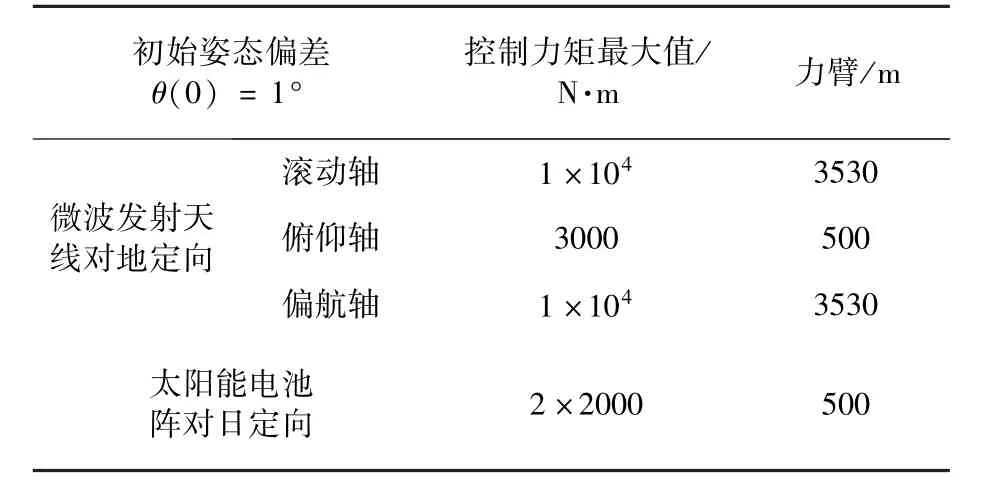
表6 工作模式下姿态控制力矩需求Table 6 Demand of attitude control moment in working mode
5Ʊ 2 控制系统方案
1)电推力器配置
用于姿态保持和轨道保持的推力器配置及数量如表7和图6所示。轨道东西向保持控制推力器和共用姿态偏航轴控制器加以控制。姿态机动过程主要负责将组装完成的太空发电站转移到工作状态,最大控制力矩为3Ʊ 5×105N·m。偏航轴最大控制力矩为1Ʊ 4×105N·m。控制调节时间为2天。只有控制微波发射天线俯仰轴对地定向的6台电推力器布置在微波发射天线上,其余皆布置在太阳能电池阵上,并且对称分布。
轨道控制中主要摄动因素为地球扁率摄动、太阳光压摄动和日月引力摄动。轨道保持控制主要分为南北控制和东西控制,南北控制主要通过轨道倾角控制实现,推力器分别布置在微波发射天线框架四周#3、#7、#11、#12位置;东西控制将推力器布置在#11、#12位置上。

表7 电推力器数量分布Table 7 Number and position of the electric thrusters
2)敏感器和系统管理计算机配置
太空发电站上配置中央系统管理计算机,但是由于系统尺寸巨大,考虑到可靠性和布线上的方便,按照每平方公里布设一台节点计算机,每个太阳电池阵上共需布设3台(互为备份),中央系统管理计算机布设于微波发射天线框架上,同时备份一台。这样整个太空发电站上共有2台中央系统管理计算机,6台节点系统管理计算机。
姿态敏感器及测量装置布置如下:
#3:天线对地定向三轴角度、角速度测量;
#7、#9:电池阵1、2对日定向角度、角速度测量;关节滚转轴和偏航轴受力;
#1、#5:电池阵南北向末端滚转轴方向和偏航轴方向柔性变形位移测量;
#2、#4、#6、#8:电池阵边框偏航轴方向柔性变形位移测量。
单个电池阵上布置3组敏感器,即3组陀螺、6个星敏感器、3个0-1太阳敏感器、3个数字太阳敏感器、加速度计30个。微波发射天线上配置2套姿态敏感器,即2套陀螺、4个地球敏感器、4个星敏感器,其中一套备份或同时工作,加速度计8个,并在2个关节处各配置1个六维力传感器用于测量关节应力。
5Ʊ 3 控制系统建模和控制算法设计
1)挠性航天器的姿态动力学模型姿态动力学模型如式(2)所示:
其中:
式中:Jx、Jy、Jz为航天器主轴的转动惯量;α为电站体坐标系相对于轨道坐标系的姿态角向量,ω0为航天器的轨道角速度;脚标sl、sr分别代表左侧和右侧太阳帆板;η为太阳帆板的振动模态坐标;F太阳帆板与航天器本体的耦合作用矩阵;Tu、Td为作用在航天器本体上的控制力矩、重力梯度力矩;ξ为太阳帆板的振动阻尼;Ω为太阳帆板的振动频率矩阵。
2)基于观测器的姿态控制系统设计
适当选取式(4)所示的状态反馈控制律:
得到闭环系统如式(5)所示:
考虑到挠性部件的振动模态坐标的测量很难实现,本文设计了相应的全维状态观测器来实现对振动模态坐标的估计,给出了基于观测器的状态反馈控制系统,其闭环系统框图如图7所示。
3)轨道控制优化方法——CW方程控制优化
在CW坐标系下的轨道摄动方程[11]如式(6)所示:
为状态变量。
为控制变量的变化矩阵,ωై为轨道角速度;BCW=[O3×3I3×3]T为摄动加速度的系数矩阵,ad为太空发电站在静止轨道处受到的摄动加速度。
根据上述的轨道动力学模型,建立控制模型,令控制力为u(t)=-KX,则施加控制力的轨道动力学模型如(7)式所示:
则
5Ʊ 4 控制系统仿真结果分析
1)姿态控制系统仿真结果
(1)电池阵姿态控制结果
仿真时间24小时,初始太阳入射角偏差为1°,电池阵角速度初值为0Ʊ 0042°/s。目标是使电池阵对日角度偏差收敛并稳定在0°。
采用角速度误差曲线描述角度变化(见图8),图中显示控制系统使得电池阵角速度逐渐稳定,并在期望角速度附近振荡。
电池阵作为大型柔性附件,对于天线指向漂移及控制都带来了一定的困难,可以从电池阵与天线阵连接关节受力中看到影响量级,从图9中可以看出,关节偏航轴受到振幅为4 N的长期振荡影响,主要产生原因为电池阵的对日跟踪及推力器在电池阵边框上的推力影响导致的电池阵的柔性振动。
(2)天线阵姿态控制结果
对滚转、俯仰、偏航三个方向分别设置1°偏差,初始姿态偏差角速度为0,进行姿态调整。
天线对地定向角速度曲线如图10所示。从角速度曲线上可以看出,天线俯仰轴由于惯量较小,且不与电池阵耦合,角速度变化较快,且曲线平滑,未受到电池阵耦合作用影响,控制效果较好。
滚转轴和偏航轴由于电池阵柔性振动影响存在角速度波动,以滚转轴为例,如图11所示,角速度振动周期与关节受力振动周期一致,而关节受力由电池阵柔性振动及对日定向姿态变化产生,从而印证电池阵柔性振动对天线滚转轴和偏航轴角速度振动的直接影响。在控制稳定阶段,天线角速度在零附近振荡,仅凭姿态控制无法抵消,需通过结构抑振方法解决。
2)轨道控制仿真结果
为了将太空发电站星下点漂移范围控制在东西南北各±0Ʊ 1°内,需要将平经度漂移量控制在±0Ʊ 1°以内,轨道倾角控制在0Ʊ 1°以内。以推力器数量、燃料消耗和轨道保持精度为优化条件,设计了实际轨道保持控制器。仅考虑地球非球形引力摄动、太阳光压摄动和日月引力摄动,且地球非球形引力摄动中仅考虑J2和J22项。仿真时间为2030年1月1日—2030年1月30日,共30天,定点位置为118°E,在高斯摄动方程基础上,使用CW方程控制优化方法[10]进行轨道保持控制优化,得到如图12所示轨道保持控制曲线。
3)燃料消耗
电推力器按照1 N推力,5000 s比冲进行考虑。对地定向姿态保持燃料消耗按照18台推力器计算,初步估算有20%的时间需要进行姿态调整,所需消耗推进剂为2Ʊ 3 t/year。对日定向姿态保持需要长期作用控制力,推进剂消耗初步估算为2Ʊ 6 t/year。为了确保GEO轨道上的定点精度,燃料消耗全年约为25 t/year。具体如表8所示。

表8 电推力器燃料消耗Table 8 Fuel consumptionof the electric thrusters
6 结论
通过对建模方法、扰动分析和控制方法的设计,完成了对千米、万吨级太空发电站姿态轨道控制系统的设计,主要结论如下:
1)通过等效方法建立的大尺度结构简化模型能够用于太空发电站的动力学建模中;
2)太空发电站姿态扰动的主要影响是光压力矩和重力梯度力矩,要特别考虑结构的对称性,以减少光压力矩影响;
3)柔性振动带来的影响虽然存在,但是并不显著,主要是由于太空发电站运动方式简单,运动角速度和控制推力均较小;
4)以电推进器为执行机构开展姿态轨道控制具有可行性。轨道控制所需燃料消耗达到25 t左右,需要进一步提升推进器比冲等性能指标。
所设计的姿态轨道控制系统虽然仿真结果能够满足要求,但是从推力器数量、燃料消耗等方面距离工程应用还有差距,还需要从总体层面进行优化设计,特别是在减重、结构控制一体化等方面。在轨道控制方面需要降低控制精度要求以减少燃料消耗,可能的途径是充分利用环境力和力矩,或者选取特殊的无控轨道等。
(References)
[1] Glaser P E.Power from the sun:its future[J].Science,1968,162(3856):857⁃61.
[2] 侯欣宾,王立.空间太阳能电站技术发展现状及展望[J].中国航天,2015(2):12⁃15.Hou X B,Wang L.The development status and prospect of the space solar power station technology[J].Aerospace Chi⁃na,2015(2):12⁃15.(in Chinese)
[3] 侯欣宾.不同太空发电站概念方案的比较研究[J].太阳能学报,2012(s1):63⁃69.HouXinbin.Analysis and comparison of various SSPS con⁃cepts[J].ActaEnergiae Solaris Sinica,2012(s1):63⁃69.(in Chinese)
[4] 侯欣宾,王立,张兴华,等.多旋转关节太空发电站概念方案设计[J].宇航学报,2015,36(11):1332⁃1338.Hou Xinbin,Wang Li,Zhang Xinghua,et al.Concept design onmulti⁃rotary joints SPS[J].Journal of Astronautics,2015,36(11):1332⁃1338.(in Chinese)
[5] 杨阳,段宝岩,黄进,等.OMEGA型太空发电站聚光系统设计[J].中国空间科学技术,2014,V34(5):18⁃23.Yang Yang,Duan Baoyan,Huang Jin,et al.SSPS⁃OMEGA:A new concentrator system for SSPS[J].Chinese Space Sci⁃ence and Technology,2014,V34(5):18⁃23.(in Chinese)
[6] Mankins J C.A fresh look at space solar power:New archi⁃tectures,concepts and technologies[J].Acta Astronautica,1997,41(4⁃10):347⁃359.
[7] Howell J T,Mankins J C.Preliminary results from NASA’s space solar power exploratory research and technology program[C]//51st International Astronautics Congress,Rio de Janei⁃ro;Brazil,2000.
[8] Wang R,Tian H,Wang H L,et al.SSPS dynamic modeling and the flexible vibration suppression[J].Applied Mechanics&Materials,2015:724⁃727.
[9] 缪炳琪,曲广吉,夏遂勤.柔性航天器模态综合⁃混合坐标动力学建模[J].浙江工业大学学报,2002,30(2):139⁃152.Miao Bingqi,Qu Guangji,Xia Suiqin.Modesynthesis⁃hybrid coordinate dynamics modeling of flexible spacecraft[J].Jour⁃nal of Zhejiang University of Technology,2002,30(2):139⁃152.(in Chinese)
[10] 屠善澄,陈义庆,严拱添,等.卫星姿态动力学与控制[M].中国宇航出版社,1999年第一版:49⁃54.Tu Shancheng,Chen Yiqing,Yan Gongtian,et al.Satellite Attitude Dynamics and Control[M].China Astronautic Pub⁃lishing House.1999:49⁃54.(in Chinese)
[11] 刘忠汉,吴宏鑫,张珺.用于自主对接接近段控制的改进双脉冲控制方法[J].空间控制技术与应用,2001,(3):1⁃9.Liu Zhonghan,Wu Hongxin,Zhang Jun.Improveddual⁃pulse control for the approach phase of autonomous docking[J].Aerospace Control and Application,2001,(3):1⁃9.(in Chi⁃nese)
(责任编辑:康金兰)
Design of Control System for Huge Flexible Structures in Space Solar Power Station
LIU Yufei,HOU Xinbin,WANG Li,ZHOU Lu
(Qian Xuesen Laboratory of Space Technology,Beijing 100094,China)
The space solar power station(SSPS)is a thousand⁃meter scale huge flexible space structure.The attitude and orbit control system was designed for the space structure with super long beam structures and membrane structures.First,an equivalent method for the main and sub trusses was proposed to simplify the huge and complex structures.The modes of the simplified system were used for the flexible multi⁃body dynamics modeling.Then,the disturbance forces and torques brought by the space environment were analyzed including the gravity gradient torque and the solar pressure force and torque.To deal with the disturbance,the three⁃axis stabilized attitude control system and the distributed orbit control system were designed with the electrical propulsion as the ac⁃tuator.The simulation results showed that the control system was feasible,but the fuel consumption was huge.
space solar power station;huge flexible space structure;flexible multi body dynamics;attitude and orbit control
V448Ʊ 2
A
1674⁃5825(2017)04⁃0440⁃08
2017⁃03⁃03;
2017⁃06⁃28
工业装备结构分析国家重点实验室基金(GZ1613)
刘宇飞,男,博士,高级工程师,研究方向为太空发电站、太阳帆等空间薄膜航天器的设计与应用。E⁃mail:liuyufei@qxslab.cn
猜你喜欢
军事文摘(2022年18期)2022-10-28
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
空间控制技术与应用(2021年4期)2021-08-02
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
导航与控制(2019年2期)2019-06-12
航天器工程(2019年1期)2019-03-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
环球时报(2018-08-21)2018-08-21
中学生数理化·高一版(2017年3期)2017-07-08