
基于点云数据的测树因子自动提取方法
2017-08-31 15:28杨全月陈志泊孙国栋
农业机械学报 2017年8期
杨全月 陈志泊 孙国栋
(1.北京林业大学信息学院, 北京 100083; 2.北京农学院计算机与信息工程学院, 北京 102206)
基于点云数据的测树因子自动提取方法
杨全月1,2陈志泊1孙国栋1
(1.北京林业大学信息学院, 北京 100083; 2.北京农学院计算机与信息工程学院, 北京 102206)
树冠的结构复杂、形态各异,测树因子的自动、准确、无损测量是森林调查中的一个重要研究项目。以三维激光扫描仪获取的三维点云数据为研究对象,基于计算几何学的寻找凸包算法,自动提取树冠的表面积、投影面积以及体积等测树因子。为验证算法的准确性,随机选取8个树种的120株待测立木进行试验,试验表明该方法测得的立木树高平均相对误差为2.33%,胸径平均相对误差为1.10%,冠幅平均相对误差为3.92%,自动解算的树冠表面积、树冠投影面积以及树冠体积相对于传统方法测得的参考值的平均相对误差分别为3.48%、6.01%和5.59%。因此以三维激光扫描仪获取点云数据,运用三维凸包算法,能够自动准确计算这些原本难以精确测量的因子,为应用三维激光扫描仪自动提取立木的测树因子提供了参考。
树冠表面积; 树冠体积; 测树因子; 自动提取; 三维激光扫描仪; 三维凸包算法
引言
单株立木的直接测定因子及其派生因子统称为基本测树因子,立木的直径、胸径、树高即为直接测定因子[1]。同时在森林单木计测中,冠幅、树冠表面积、树冠投影面积、树冠体积等也是林业从业者进行林木生长监测、生物量计算中非常重要的参数,冠体的大小是预测树木生长量的基本依据之一[2]。
传统的测量方法主要是通过将树木伐倒后,对各个参数因子进行测量。其存在操作复杂、精度不高、破坏性强以及自动化低等特点,尤其是树冠的测量,因其经济价值低、难以测量和利用,在测量过程中往往被忽略。近年来,随着森林生态效益及社会效益地位的提高,树冠的表面积、投影面积及体积等测树因子及参数的准确无损测量越来越受到重视[3]。但传统的森林调查方法和手段无法满足这些参数的准确测量,难以满足现代城市森林的发展要求。
随着信息化技术的发展,文献[4-7]提出用全站仪、经纬仪对立木进行测量,能够很好地解决立木胸径、树高等直接测定因子的测量。文献[8-12]通过模型和遥感图像来获取树冠信息,但是树冠的准确测量还是没有很好解决。因此,越来越多的研究学者把三维激光扫描仪引入到树冠的测量中。
利用三维激光扫描仪进行树冠表面积和体积测量的研究主要有:樊仲谋等[13]采用立方体格网法来遍历求解内部体积;巩垠熙等[14-15]通过改进Delaunay算法来提取树冠三维信息;徐伟恒等[16]利用不规则体切片分割累加,实现树冠体积的自动提取;韦雪花等[17]提出以固定大小的体元来模拟不规则树冠形状的体元模拟法;王佳等[18]将树冠分割为多个不规则的台体,对每个台体进行体积加和;刘芳等[19]应用不规则三角网TIN的原理方法来计算冠体体积。这些研究方法的核心内容大致都是将树冠分割或者近似模拟,所计算的均为近似值。
本文通过对树冠点云进行分析,研究如果存在一张虚拟的网,使其包裹住整个树冠的点云数据,那这个网络所对应的表面积、投影面积以及体积就是树冠的表面积、投影面积和体积。因此,本研究拟找到一个最小的网使其恰好包含所有的点云数据,而这张网就是三维凸包,从而可自动计算获取树冠的表面积、投影面积以及树冠体积等测树因子。
1 原理
本研究的原理如图1所示,主要过程为利用三维激光扫描仪获取待测立木的三维点云数据,并对获取的点云数据进行拼接、冠体提取、数据的压缩和抽稀,生成可进行三维凸包计算的点集。通过对点云数据的直接测量获取立木的胸径、树高、冠幅等可直接测量因子,同时利用自行编写的三维凸包算法对点集自动计算获取树冠的表面积、树冠投影面积以及树冠体积。然后利用胸径尺、皮尺和微型超站仪测量获取立木的胸径、树高、冠幅、树冠表面积、树冠投影面积、树冠体积等因子,对自动获取的数据进行对比分析,验证所提算法的可靠性。
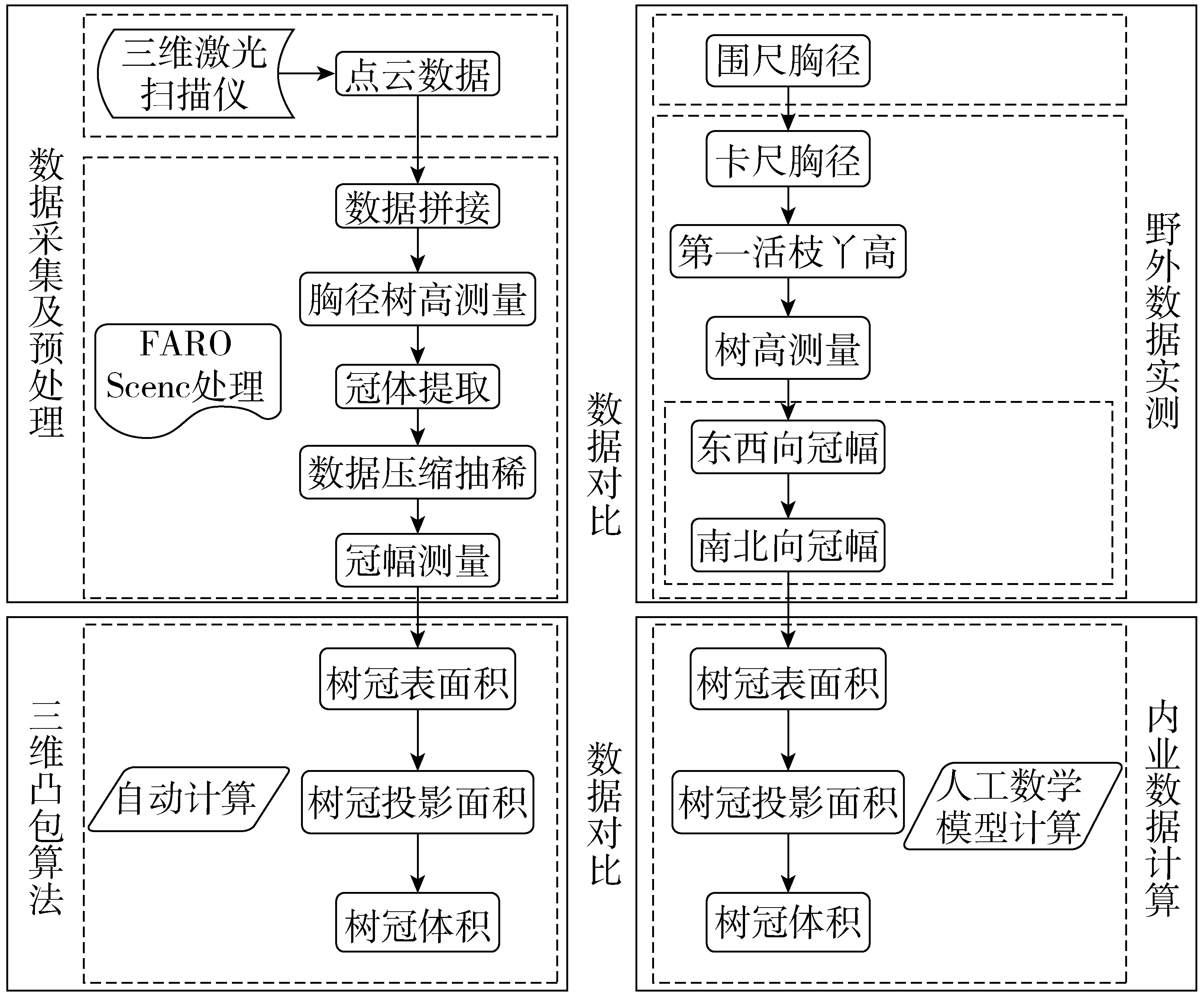
图1 原理图Fig.1 Diagram of principle
2 研究方法
2.1 立木点云的三维凸包算法
凸包是计算几何学中的概念,是指在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。换言之,凸包就是在给定二维平面上的点集,将最外层的点连接起来构成的凸多边形,能包括点集中所有的点。基于此,本文将二维平面扩展成空间三维,研究能够将所有点云数据包含在内的最小多面体,简称为三维凸包。
三维凸包算法的原理是首先任选4个不在同一平面上的4个点形成一个四面体,然后每次新增加一个点,分两种情况:点在凸包内,则舍弃跳过;点在凸包外,找到能从这个点可以看到的面,删除这些面并形成新的面(如图2所示)。
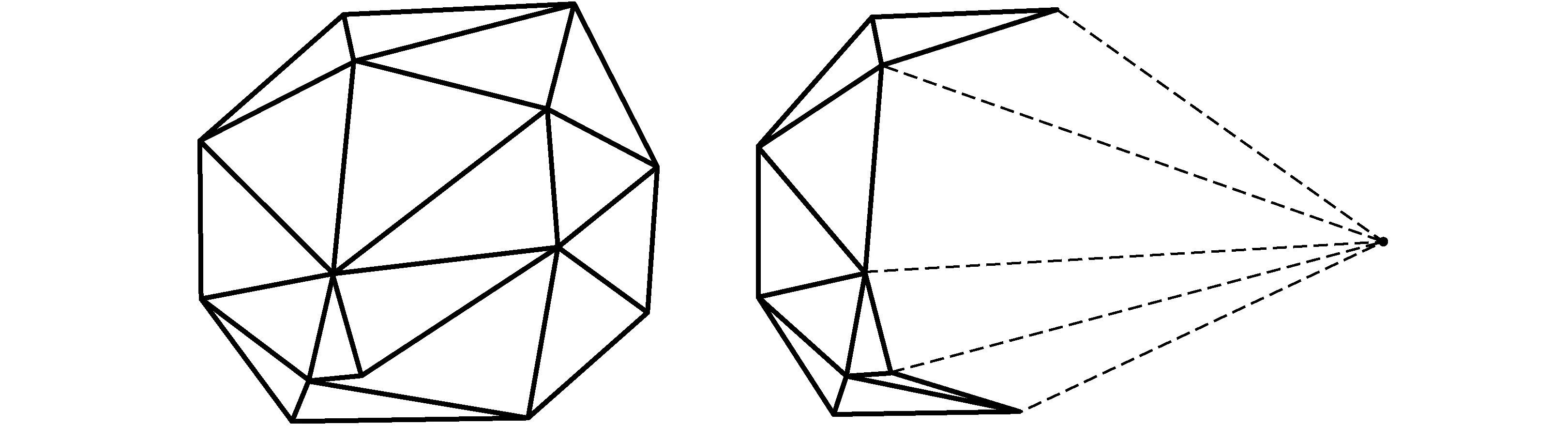
图2 三维凸包示意图Fig.2 Schematic of 3D convex hulls construction
三维凸包编程算法过程如下(以现存三维凸包ABCDEF为例,如图3所示,图中A、B、C、D、E、F、P点为采集的空间点):
(1)增加一个新点P,遍历三维凸包的三角形,计算三角形是否正面朝向点P。取三角形上任意点并与P点相连接形成向量lAP,若三角形的法向量n与向量lAP的点乘大于等于零,则该三角形正面朝向点P,否则背面朝向点P。如果遍历的所有三角形都背面朝向点P,则新点在三维凸包内部,舍弃P点,不需要更新三维凸包;否则进入下一步。
(2)遍历三维凸包中的每条边,计算每条边相对于P点是否为明暗分界线。明暗分界线是指该条边对应的相邻2个三角形一个正面朝向P点,一个背面朝向P点,即对于P点,一个三角形可见而另一个三角形不可见。
(3)由于三维凸包是封闭体,因此得到的所有明暗分界线连接成一个封闭的多边形。明暗分界线上每个点与P相连并加上明暗分界线本身,可以得到新三维凸包的新三角面。
(4)剔除旧的三维凸包中不再是三维凸包外表面的三角形,即剔除所有正面朝向P点的三角面。
(5)依次执行步骤(1)~(4),直到所有点云数据遍历完毕,所得到的三维凸包即为立木点云的三维凸包。
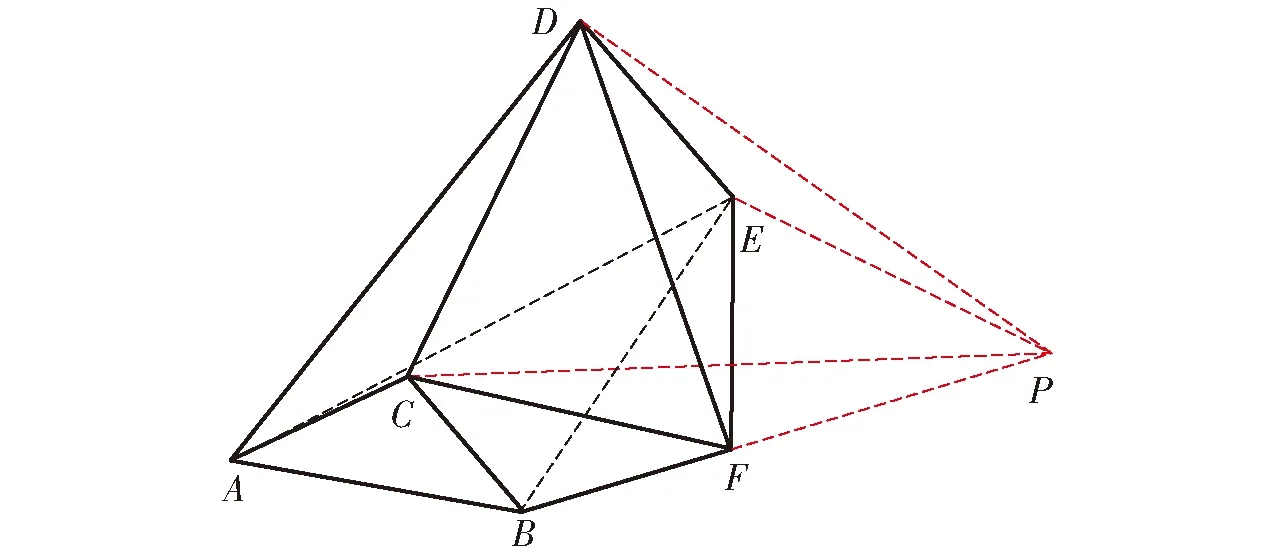
图3 新三维凸包ABCDEFP生成示意图Fig.3 Schematic of new 3D convex hulls construction for ABCDEFP
2.2 立木树冠表面积的计算模型
获得立木树冠冠体点云的三维凸包后,通过计算组成三维凸包的所有三角形的面积即可获取树冠的表面积,计算式为
(1)
式中Sg——立木树冠的表面积Si——三维凸包第i个三角形面积
2.3 立木树冠投影面积的计算模型
在构建立木树冠点云的三维凸包之后,假设有平行光束从正上方无穷远处照射过来,三维凸包在水平面上的投影即为立木树冠的投影面积,故树冠投影面积的计算模型如下(以三维凸包ABCDEFG为例,如图4所示):
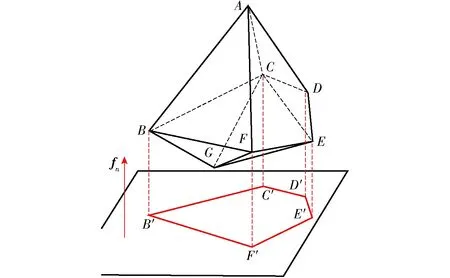
图4 三维凸包投影面积示意图Fig.4 Schematic of 3D convex hulls crown construction for projection area
(1)假定水平面的法向量fn与正上方投影光束相反,遍历凸包所有边,确定明暗分界线。即遍历所有的边,计算任意一条边相对应的2个三角面的法向量n与向量fn的点乘,若一个面点乘大于等于零,另一面点乘小于零,则该边为明暗分界线。
(2)得到的所有明暗边界线会封闭成一个多边形,将其投影在水平面上形成的多边形即为立木树冠的投影面积。
(3)假设该明暗分界线所组成的点的个数为m,对应的点坐标为Mi(Xi,Yi,Zi),立木树冠投影面积计算式为
(2)
2.4 立木树冠体积的计算模型
传统树冠体积计算方法是以树冠的冠幅和冠高为参数,将树冠视作规则几何体计算体积。由于立木树冠并不规则,对数据结果会产生很多的影响。故本研究的树冠体积计算模型是基于2.1节所建立的三维凸包进行计算分析,具体算法过程如下:
(1)计算三维凸包中所有三角形相对于正上方无限远处的朝向是正面还是背面。
(2)三维凸包上任意三角形投影到水平面上可得到三角形或者线段,如果投影是三角形则可与凸包三角形构成三棱柱,计算所有正面朝向的三角形所投影形成的三棱柱的体积;如果投影为线段则体积为零。累加所有三棱柱的体积即可得到正面三棱柱的体积和。
(3)类似于步骤(2),可计算出所有背面朝向光照方向的三角形的三棱柱体积。累加可得到背面三棱柱的体积和。
(4)将正面三棱柱体积和减去背面三棱柱体积和,即得到所求的凸包体积,也就是立木树冠体积。
2.5 数据处理过程及方法
试验数据的处理过程包括三维激光点云数据的预处理和预处理数据的计算两部分。三维激光点云数据的预处理主要是通过FARO Scene 6.2软件进行数据处理,具体步骤为:
(1)将目标树的3个扫描站点所获取的数据(数据格式为.fls)加载到Faro Scene的工作区域中,加载3个扫描站点的数据,软件会根据摆放的3个参考椭球之间的位置关系进行数据的匹配,并将3个扫描站获取的数据拼接起来,形成目标树的三维立体影像(图5a)。
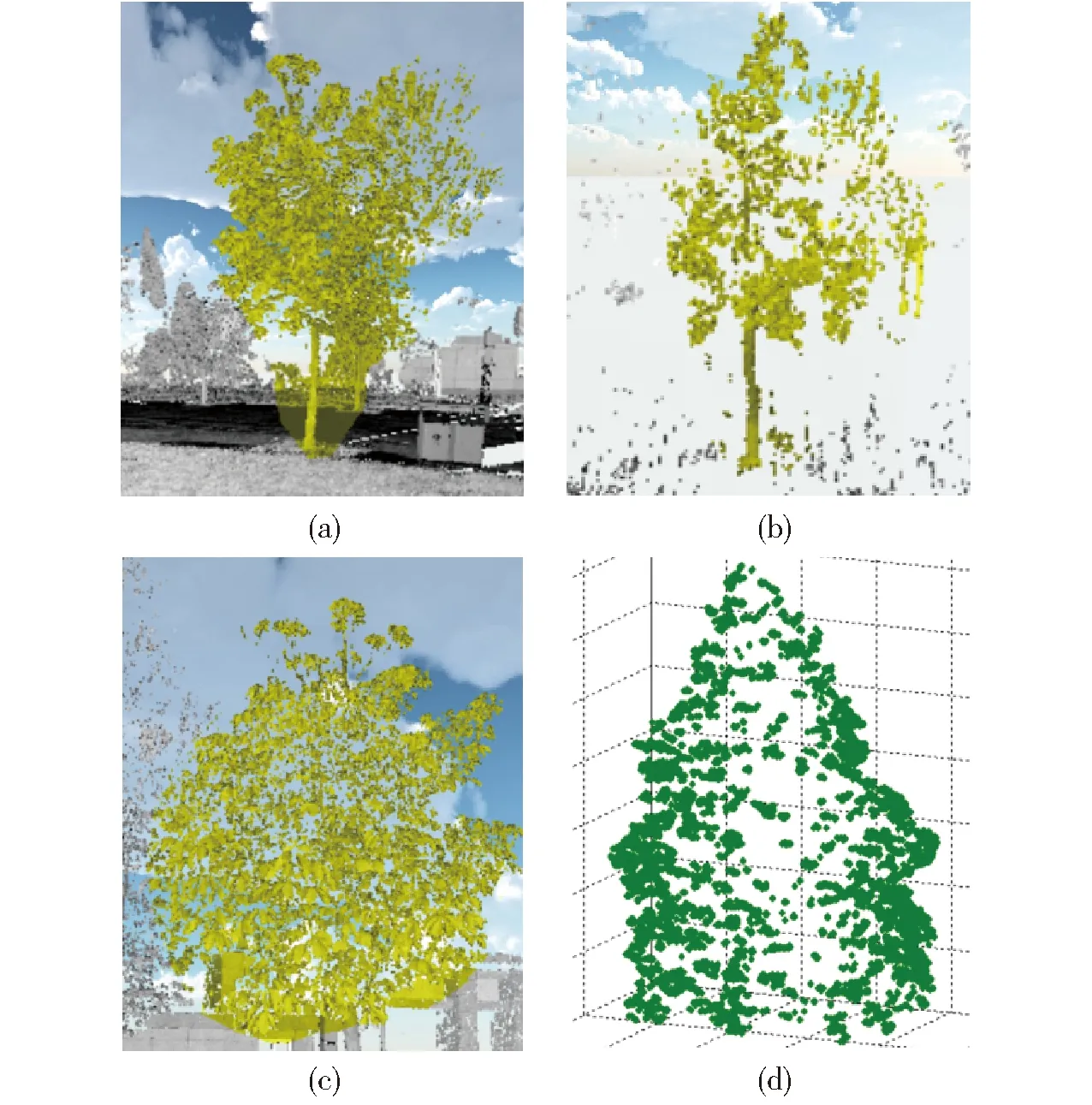
图5 三维点云预处理Fig.5 Schematics of 3D point cloud data preprocessing
(2)在三维展示模式下,剔除非目标树所有干扰点云数据,保留目标树三维点云数据(图5b)。根据测量记录的目标树第一活枝丫高,在三维点云中删除第一活枝丫高以下的数据(影像),得到目标树完整的树冠冠体的三维点云数据(图5c)。
(3)为了降低三维凸包运算过程中数据量过大的影响,通过压缩、抽稀等算法减少点云数据的冗杂部分,然后将剩余的点云数据以XYZ坐标点的形式导出,并以.txt的文件格式进行保存。数据导出效果如图5d(圆柏)所示。
(4)在步骤(2)时,可在模型中直接测量获得立木的胸径、树高、树干任意处直径、树冠的东西方向冠幅和南北方向冠幅等数据。
在预处理数据的计算部分,通过利用Microsoft Visual Studio开发平台,基于2.1~2.4节的计算原理、设计的程序进行数据处理,计算获取立木的树冠表面积、树冠投影面积(图6a)、树冠的体积(图6b)等。
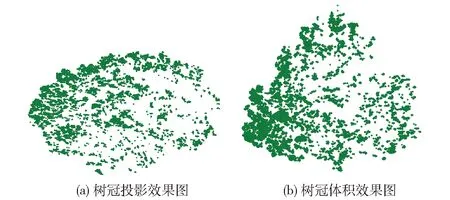
图6 侧柏点云效果Fig.6 Schematics of Platycladus orientalis point clouds effect
3 结果分析
3.1 数据采集
研究试验区域为北京地区的高校、森林公园、周边山区等。利用三维激光扫描仪(FARO Focus3Ds120型,北京浩宇天地测绘科技发展有限公司,中国)对目标立木进行360°全方位的扫描测量,获取目标立木详细的点云数据。
立木点云数据的采集时间为8—9月份,采集过程为对每株目标树种进行3个站点的扫描,每相邻两站的理想间隔角度为120°(以目标树作为参考)。为了方便后续的数据配准工作,在扫描过程中相邻扫描站之间需保证有3个公共的参考椭球,且扫描过程中3个公共的参考椭球之间的位置互不遮挡,也不能摆成一条直线。需要特别注意的是对目标树进行扫描时,扫描一旦开始,就必须完成对目标树所有的扫描测站后才能移动参考椭球。如果在扫描过程中参考椭球的位置发生变化,则必须重新开始扫描。大量的试验证明,对目标树进行完整扫描测量需要10~15 min。
试验过程中,随机选取北京市常见树种的柿树、银杏、玉兰、杨树、侧柏、圆柏、雪松、白皮松8个树种(表1)作为采集数据,试验期间共采集232株立木的点云数据,经对数据整理,从每种树种中随机选择15株立木的点云数据进行计算分析,试验样本共计120株。
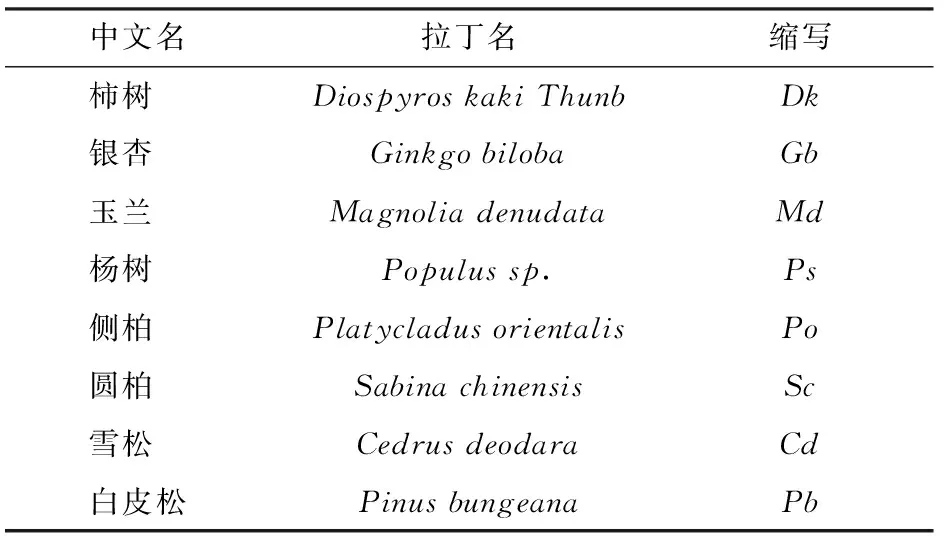
表1 试验树种信息Tab.1 Information of experimental tree species
3.2 胸径树高冠幅对比分析
立木的围尺胸径的参考值由测径尺(测树钢围尺,太平洋牌)测得。立木的卡尺胸径、树高、第一活枝丫高、东西方向冠幅和南北方向冠幅由微型超站仪[20](PD-5 SERIES型,南方测绘仪器有限公司,中国)测得,其中部分不能通过微型超站仪测得的冠幅由皮尺测得。经过对试验样本的120株立木的数据分析,得到立木的树高、围尺胸径、卡尺胸径、东西方向冠幅和南北方向冠幅的误差,如图7所示。
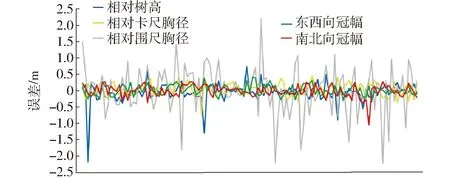
图7 胸径树高冠幅与参考值的误差曲线Fig.7 Error curves of diameter, tree height and crown width compared with reference values
由图7分析可知,立木树高的误差范围为-2.18~0.74 m;立木胸径相对于卡尺参考值的误差范围为-0.8~0.5 cm,相对于围尺参考值的误差范围为-2.2~2.2 cm;立木冠幅的东西向的误差范围为-0.35~0.42 m,南北向的误差范围为-1.04~0.28 m。对数据的相对误差进行分类统计,如表2所示。
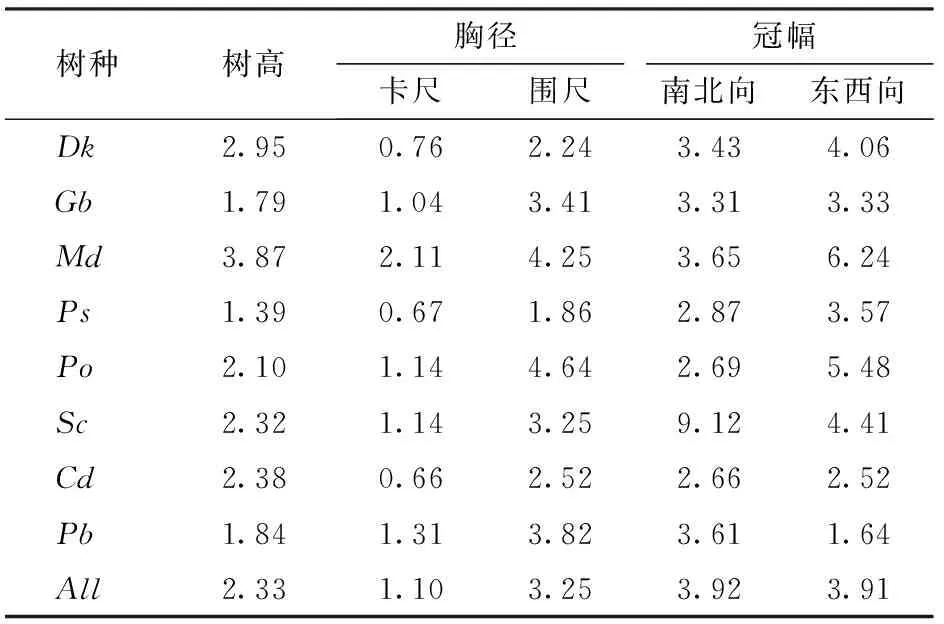
表2 各树种不同因子的平均相对误差Tab.2 Average relative error of different factors of tree species %
样本中120株立木的树高平均相对误差为2.33%,相对卡尺胸径的平均相对误差为1.10%,相对于围尺胸径的平均相对误差为3.25%,东西向冠幅的平均相对误差为3.91%,南北向冠幅的平均相对误差为3.92%。胸径、树高、冠幅的测量精度符合国家森林资源连续清查中对胸径、树高、冠幅的精度要求。
3.3 树冠表面积、投影面积、体积对比分析
树冠表面积、投影面积以及体积的对比值是利用传统的人工测量方法得到,通过测量树高、第一活枝丫高、冠幅等,利用树种冠形选择近似的规则几何体的计算公式来计算树冠表面积、投影面积以及体积,得到120株立木的详细数据,具体见表3和图8。
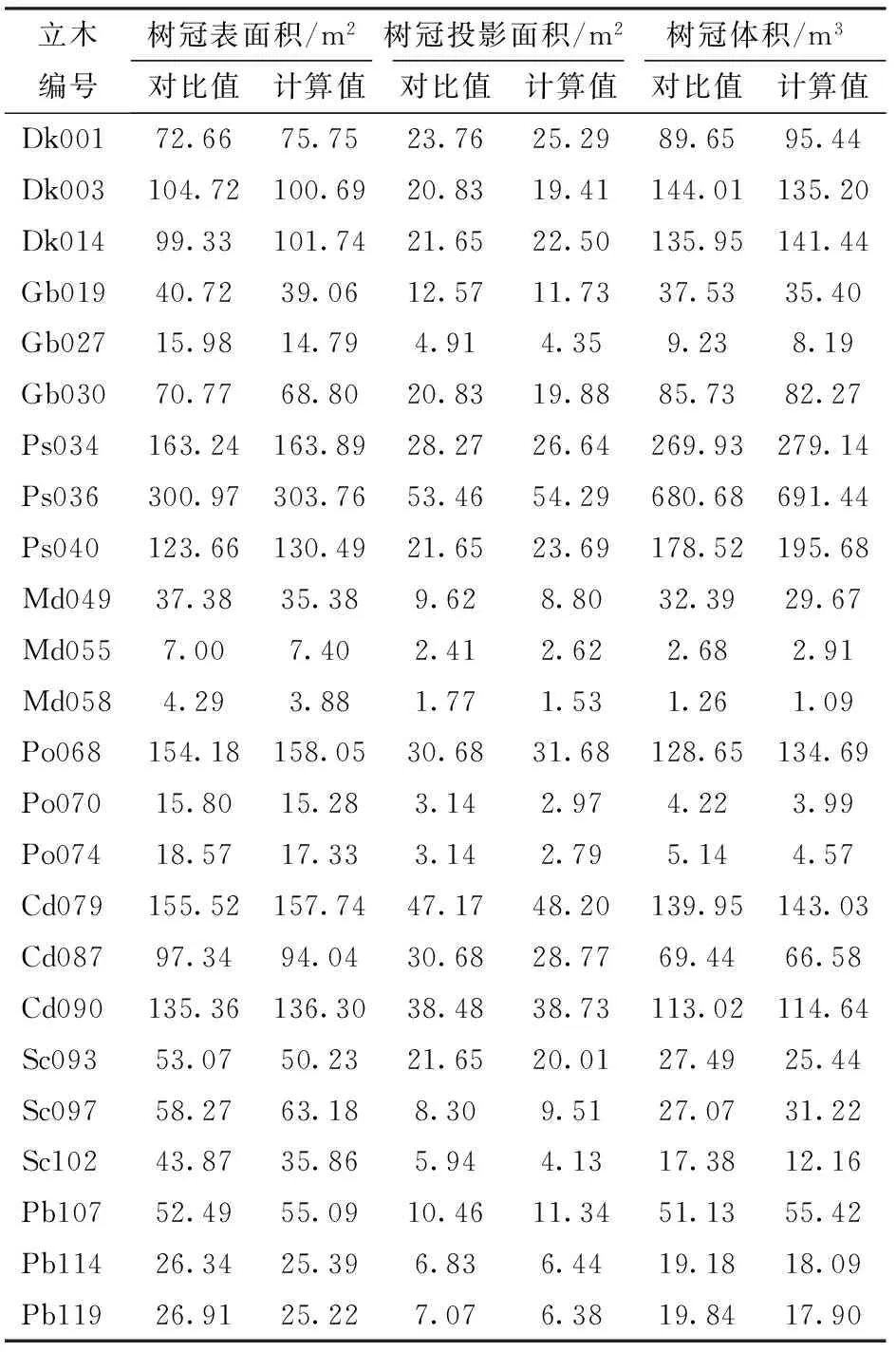
表3 部分树冠表面积、投影面积、体积的对比值与计算值Tab.3 Comparative and calculated values for part of crown surface area, crown projection area and crown volume
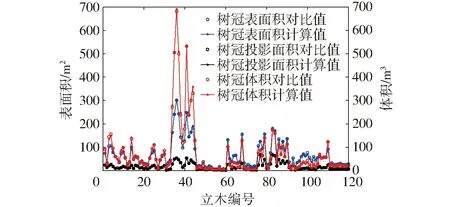
图8 树冠表面积、投影面积、体积对比分析图Fig.8 Comparative analysis of crown surface area, crown projection area and crown volume
经过对120株立木的数据进行分析可知,树冠表面积的相对误差范围为-18.26%~9.34%,平均相对误差为3.48%;树冠投影面积的相对误差范围为-68.23%~15.10%,平均相对误差为6.01%,若刨除树冠投影面积的异常数据(-68.23%),其相对误差范围为-30.39%~15.10%。其中异常数据为圆柏(编号:Sc094),经过对实株对比分析,造成数据异常的原因为该植株矮小且极不规则,这就在人工获取对比值时产生了较大的人为误差;树冠体积的相对误差范围为-30.05%~15.31%,平均相对误差为5.59%。
4 结论
(1)利用三维激光扫描仪获取立木的点云数据,并通过数据拼接,干扰点云的剔除,树冠点云的提取、压缩和抽稀等过程得到可进行三维凸包运算的点集。通过三维凸包算法并利用研究所提出的树冠表面积、树冠投影面积以及树冠体积的计算模型来自动计算待测立木的树冠表面积、树冠投影面积以及树冠体积。并通过120株试验样本验证了算法、程序的可行性。
(2)试验验证该方法测得的立木树高的平均相对误差为2.33%,胸径的平均相对误差为1.10%,冠幅的平均相对误差为3.92%,自动解算的树冠表面积、树冠投影面积以及树冠体积相对于传统方法测得的参考值的平均相对误差分别为3.48%、6.01%和5.59%。
1 孟宪宇.测树学[M].北京:中国林业出版社,2006:10-13.
2 谢鸿宇,赵耀龙,杨木壮,等.基于地面Lidar的树冠体积和表面积测量方法研究[J].中南林业科技大学学报,2015,35(4):1-6,13. XIE Hongyu, ZHAO Yaolong, YANG Muzhuang, et al. Measurement and calculation methods of volume and surface area of tree crown based on terrestrial 3D laser scanning system[J]. Journal of Central South University of Forestry & Technology, 2015,35(4):1-6, 13.(in Chinese)
3 冯仲科,赵春江,聂玉藻,等.精准林业[M].北京:中国林业出版社,2002:10-30.
4 冯仲科,黄晓东,刘芳.森林调查装备与信息化技术发展分析[J/OL].农业机械学报, 2015, 46(9):257-265.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150938&flag=1.DOI:10.6041/j.issn.1000-1298.2015.09.038. FENG Zhongke, HUANG Xiaodong, LIU Fang. Forest survey equipment and development of information technology[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(9): 257-265.(in Chinese)
5 曹忠,冯仲科,徐伟恒,等.电子经纬仪无损立木材积测量方法及精度分析研究[J].中南林业科技大学学报,2015,35(4):7-13. CAO Zhong, FENG Zhongke, XU Weiheng,et al. Standing tree volume nondestructive measurement methods and precision analysis based on electronic theodolite[J].Journal of Central South University of Forestry & Technology, 2015,35(4): 7-13.(in Chinese)
6 曹忠,巩弈成,冯仲科,等.电子经纬仪测量立木材积误差分析[J/OL].农业机械学报,2015,46(1):292-298.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150141&flag=1. DOI:10.6041/j.issn.1000-1298.2015.01.041. CAO Zhong, GONG Yicheng, FENG Zhongke, et al. Error analysis on standing tree volume measurement by using electronic theodolites [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(1):292-298. (in Chinese)
7 赵芳,冯仲科,高祥,等.树冠遮挡条件下全站仪测量树高及材积方法[J].农业工程学报,2014,30(2):182-190. ZHAO Fang, FENG Zhongke, GAO Xiang, et al. Measure method of tree height and volume using total station under canopy cover condition[J].Transactions of the CSAE, 2014, 30(2):182-190. (in Chinese)
8 付尧,王新杰,孙玉军,等.树冠提取技术研究进展[J]. 世界林业研究,2013,26(4):38-42. FU Yao, WANG Xinjie, SUN Yujun, et al. A study of tree crown information extraction method [J]. World Forestry Research, 2013,26(4):38-42.(in Chinese)
9 丁为民,赵思琪,赵三琴,等.基于机器视觉的果树树冠体积测量方法研究[J/OL]. 农业机械学报,2016,47(6):1-10,20.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160601&flag=1. DOI:10.6041/j.issn.1000-1298.2016.06.001. DING Weimin, ZHAO Siqi, ZHAO Sanqin,et al.Measurement methods of fruit tree canopy volume based on machine vision[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(6):1-10, 20.(in Chinese)
10 廖彩霞,李凤日. 樟子松人工林树冠表面积及体积预估模型的研究[J]. 植物研究,2007,27(4):478-483. LIAO Caixia, LI Fengri. The predicting models of crown surface area and crown volume for Mongolian pine plantation[J]. Bulletin of Botanical Research,2007,27(4):478-483.(in Chinese)
11 吴明钦,孙玉军,郭孝玉,等. 长白落叶松树冠体积和表面积模型[J]. 东北林业大学学报,2014,42(5):1-5. WU Mingqin, SUN Yujun, GUO Xiaoyu, et al. Predictive models of crown volume and crown surface area for koreanlarch[J]. Journal of Northeast Forestry University,2014,42(5):1-5.(in Chinese)
12 姜仁荣,汪春燕,沈利强,等. 基于高分辨率遥感图像的荔枝林树冠信息提取方法研究[J/OL]. 农业机械学报,2016,47(9):17-22. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160903&flag=1. DOI:10.6041/j.issn.1000-1298.2016.09.003. JIANG Renrong, WANG Chunyuan, SHEN Liqiang, et al. A method for lichee’s tree-crown information extraction based on high spatial resolution image[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(9):17-22.(in Chinese)
13 樊仲谋,冯仲科,郑君,等.基于立方体格网法的树冠体积计算与预估模型建立[J/OL].农业机械学报,2015,46(3): 320-327.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150347&flag=1. DOI:10.6041/j.issn.1000-1298.2015.03.047. FAN Zhongmou,FENG Zhongke,ZHENG Jun,et al. Tree crown volume calculation and prediction model establishment using cubic lattice method[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3): 320-327.(in Chinese)
14 巩垠熙,何诚,冯仲科,等.基于改进Delaunay 算法的树冠三维重构单木因子提取[J/OL].农业机械学报,2013,44(2): 192-199.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130236&flag=1. DOI:10.6041/j.issn.1000-1298.2013.02.036. GONG Yinxi, HE Cheng, FENG Zhongke, et al.Amended Delaunay algorithm for single tree factor extraction using 3-D crown modeling[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013, 44(2): 192-199.(in Chinese)
15 GONG Yinxi, YAN Fei, FENG Zhongke, et al.Extraction of crown volume using triangulated irregular network algorithm based on LiDAR[J]. Journal of Infrared and Millimeter Waves, 2016,35(2):177-183, 189.
16 徐伟恒,冯仲科,苏志芳,等.一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J].光谱学与光谱分析,2014,34(2): 465-471. XU Weiheng,FENG Zhongke,SU Zhifang,et al. An automatic extraction algorithm for individual tree crown projection area andvolume based on 3D point cloud data[J].Spectroscopy and Spectral Analysis,2014,34(2): 465-471.(in Chinese)
17 韦雪花,王永国,郑君,等. 基于三维激光扫描点云的树冠体积计算方法[J/OL].农业机械学报,2013,44(7):235-240. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130741&flag=1. DOI:10.6041/j.issn.1000-1298.2013.07.041. WEI Xuehua,WANG Yongguo,ZHENG Jun,et al.Tree crown volume calculation based on 3D laser scanning point clouds data[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(7): 235-240.(in Chinese)
18 王佳,杨慧乔,冯仲科. 基于三维激光扫描的树木三维绿量测定[J/OL]. 农业机械学报,2013,44(8):229-233.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130839&flag=1. DOI:10.6041/j.issn.1000-1298.2013.08.039. WANG Jia, YANG Huiqiao, FENG Zhongke. Tridimensional green biomass measurement for trees using 3D laser scanning[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(8):229-233.(in Chinese)
19 刘芳,冯仲科,杨立岩,等. 基于三维激光点云数据的树冠体积估算研究[J/OL]. 农业机械学报,2016,47(3):328-334. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160346&flag=1. DOI:10.6041/j.issn.1000-1298.2016.03.046. LIU Fang, FENG Zhongke, YANG Liyan, et al. Estimation of tree crown volume based on 3D laser point clouds data[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):328-334.(in Chinese)
20 黄晓东,冯仲科,解明星,等. 自动测量胸径和树高便携设备的研制与测量精度分析[J].农业工程学报,2015,31(9):92-99. HUANG Xiaodong,FENG Zhongke,XIE Mingxing,et al. Developing and accuracy analysis of portable device for automatically measuring diameter at breast height and tree height[J].Transactions of the CSAE,2015,31(9):92-99.(in Chinese)
Automatic Extraction Method of Tree Measurement Factors Based on Point Cloud Data
YANG Quanyue1,2CHEN Zhibo1SUN Guodong1
(1.SchoolofInformationScienceandTechnology,BeijingForestryUniversity,Beijing100083,China2.SchoolofComputerandInformationEngineering,BeijingUniversityofAgriculture,Beijing102206,China)
On account of the crown’s complicated structure and various forms, extracting the tree measurement factors of standing tree automatically, accurately and nondestructively is an important research subject in the forest survey. The three-dimensional (3D) point cloud data via 3D laser scanner was used as the study object. The 3D convex hulls construction algorithm based on computational geometry was presented to extract the crown surface area, crown projection area and crown volume automatically. In order to verify the accuracy of the algorithm, totally eight tree species and 120 standing trees were randomly selected for testing. The average relative errors of standing tree height, DBH and crown width were 2.33%, 1.10% and 3.92%, respectively. The relative average errors of auto computing for crown surface area, crown projection area and crown volume were 3.48%, 6.01% and 5.59%, respectively. 3D point cloud data via 3D laser scanner and 3D convex hulls construction algorithm could help to automatically and accurately calculate the values of these parameters which could not be measured accurately before, providing a reference for extracting the tree measurement factors of standing tree automatically via 3D laser scanner in the future. The proposed method had a practical prospect of application in the survey of forest resources.
crown surface area; crown volume; tree measurement factors; automatic withdrawal; 3D laser scanner; 3D convex hulls algorithm
10.6041/j.issn.1000-1298.2017.08.020
2017-05-02
2017-05-23
国家自然科学基金项目(61300180)和北京市教委科研计划项目(KM201710020016)
杨全月(1979—),女,博士生,北京农学院讲师,主要从事林业信息化研究,E-mail: 39062104@qq.com
陈志泊(1967—),男,教授,博士生导师,主要从事计算机软件和林业物联网研究,E-mail: zhibo@bjfu.edu.cn
S758.1
A
1000-1298(2017)08-0179-07
猜你喜欢
安徽农业科学(2022年19期)2022-10-29
浙江农林大学学报(2022年4期)2022-08-18
卫星应用(2022年3期)2022-05-23
绿色天府(2022年2期)2022-03-16
林业科学研究(2021年6期)2022-01-05
内蒙古林业调查设计(2021年5期)2022-01-05
新农民(2021年21期)2021-09-17
林业科技情报(2021年3期)2021-09-01
林业科技情报(2021年2期)2021-07-13
中南林业调查规划(2017年1期)2017-12-19
