
三维激光扫描仪在校园建筑物建模中的应用
2017-09-03 10:29田振兴范天雨
山西建筑 2017年21期
田振兴 王 博 范天雨 董 浩
(华北水利水电大学,河南 郑州 450045)
·测量·
三维激光扫描仪在校园建筑物建模中的应用
田振兴 王 博 范天雨 董 浩
(华北水利水电大学,河南 郑州 450045)
通过对三维激光扫描仪的基本工作原理及工作流程的介绍,并结合实例,最终实现了校园建筑物模型的建立和网页发布,为数字校园的建立提供可靠的技术支持。
三维激光扫描仪,建筑物,点云数据,数字校园
0 引言
三维激光扫描技术又称为实景复制技术,通过大面积高分辨率地快速获取被测对象表面的三维坐标数据,建立物体的三维影像模型,由于其具有主动性强,能全天候工作;数据获取速度快,实时性强;数据量大,精度较高;数字特征,信息传输、加工、表达容易等[1]独特优势,被广泛应用于测绘工程、水利水电工程、地铁隧道工程、逆向工程、工厂数字化、安装工程、BIM建筑扫描、航空航天、自然勘察、古建筑保护、文化遗产等数字化存档和修复保护,刑侦、事故、安全等调查取证等领域。
本文介绍了徕卡ScanStation P30新一代超速三维激光扫描仪的工作流程,并结合三维激光扫描仪的基本工作原理,实现了从数据采集、数据处理、数据建模以及后期网页发布的全过程,最后以华北水利水电大学农水实验场为例,构建了农水实验场的三维模型,并为数字化校园的建立提供可靠的技术支持。
1 三维激光扫描仪基本工作原理和技术参数
1.1 三维激光扫描仪的基本工作原理
三维激光扫描仪的角度测量系统和激光测距系统能够完成对物体的快速扫描,通过被测物体表面的反射点到观测点的斜距、竖直角度、水平角度和反射强度,计算获得点云数据并自动储存。
三维激光扫描仪确定一个右手坐标系,坐标系以扫描仪的中心为原点,竖直方向为Z轴正方向,水平扫描面内与Z轴垂直的方向为X轴、Y轴,X轴、Y轴相互垂直,X轴、Y轴、Z轴构成右手直角坐标系[2]。
直角坐标系内点云测量原理如图1所示。
扫描仪由两个同步镜旋转,并测量每一个激光脉冲来计算被测物体表面到仪器的距离,被测物体任意一个点云P的三维坐标(X,Y,Z)计算公式为:
(1)
1.2 技术参数
本次实例中采用徕卡P30三维激光扫描仪,主要技术参数如表1所示。
2 地面三维激光扫描技术的工作步骤
利用三维激光扫描技术获取点云数据一般分为三步:第一步:制定扫描计划;第二步:外业数据扫描;第三步:内业数据处理。在进行具体工作前应制定详细的工作计划,一般包括:1)勘察现场,绘制整体平面示意图。测量人员及记录人员实地勘察作业环境,包括地形、路面的光滑程度、作业范围的空间结构,记录员绘制整体的平面示意图。2)规划站点,布置标靶。测量人员根据作业要求,规划站点的数量及位置并布置标靶,记录员记录站点和标靶位置,并在平面示意图上标注站点和标靶的位置;外业数据扫描主要是对数据的采集并对采集到的数据进行现场分析,检查其是否符合要求[3];内业数据处理主要是对外业采集到的原始点云数据进行数据去噪、点云拼接、图像处理、数据建模以及后期的网页发布等工作。


表1 徕卡P30主要技术参数
3 应用实例
本实例为华北水利水电大学农水实验场的扫描建模,采用徕卡P30三维激光扫描仪和系统软件Cyclone 9.1来获取和处理数据。
1)扫描前的准备工作:因扫描范围大,将人员分为两组,一组负责室内扫描;另一组负责室外扫描。小组确定后,小组成员需进行现场勘察,明确扫描线路,合理规划扫描的观测站数及观测站点的位置,标靶粘贴位置及标靶的数量。记录员绘制整体的平面示意图,并在平面示意图上标注站点和标靶位置。因扫描范围大,结构复杂,共设置站点63个,其中室内40个,室外23个。本次实验由于测站数较多,圆形磁性靶标难以满足实验要求,故采用4.5 in纸质标靶并粘贴在建筑物的表面。
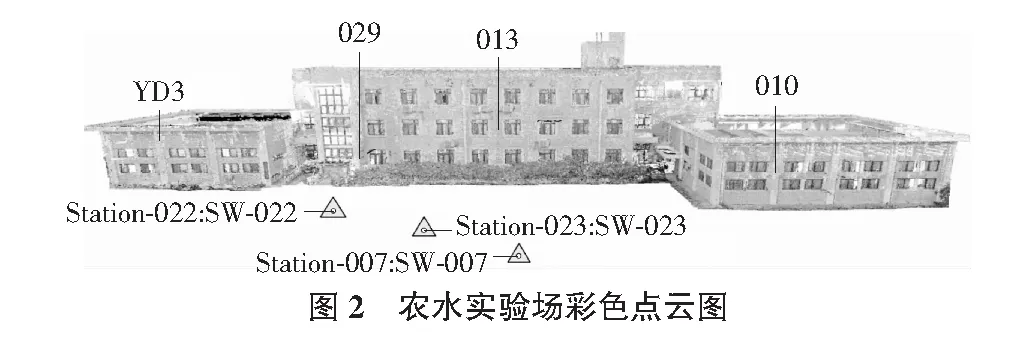
2)扫描:采用徕卡P30三维激光扫描仪对农水实验场场地进行全面扫描,因仪器较为先进,可实时监测获取数据的有效性,对不合格的数据予以删除并进行重新扫描。本次实验采用全景扫描,部分采用自定义扫描。扫描方式为扫描加拍照。分辨率为6 mm@50 m,灵敏度为正常。图2为农水实验场的彩色点云,其中YD3,013,029,010等为标靶的识别,Station-023,Station-007,Station-022为站点位置标号。
3)测量标靶坐标:为了更加直观表现建筑物数字化的特点,在标靶粘贴完毕后选取了6个特征标靶,并测量了这6个标靶的坐标值,用于赋予点云数据真实的坐标值。坐标格式为X,Y,Z形式。
4)点云数据拼接:点云数据拼接模式主要包括基于标靶的拼接、基于特征点的拼接、基于测量点的拼接以及混合拼接等方式。因本次实验采用大量标靶,并在标靶布置时确保两站至少有4个以上标靶重合[4],且3个标靶未在一条直线上,故采用基于标靶拼接的形式进行点云数据的拼接,这种拼接方式速度快,且拼接精度极高,提高了内业数据处理的效率,具体的拼接误差如图3所示,拼接精度控制在6 mm以内。

5)数据去噪:在扫描农水实验场场地时,由于建筑物周围有树木、杂草、行人的干扰,对整体效果产生影响,需进行去噪处理,选中噪声数据通过Cyclone软件中的Fence/delete inside工具以手动的方式删除那些不属于建筑物的噪声点[5]。
6)三维模型建立:本次实验的三维模型由系统软件Cyclone以及第三方软件(3DMax)建立,建成的模型进行了贴图和渲染,最终成果图如图4所示。
7)网页发布:本次实验将最终模型通过Cyclone的TruView插件进行了网页发布,师生可以免费下载TruView插件进行远程浏览,并可在网页内对农水实验场现场进行量测,包含坐标点量测、距离量测等简单的量测,网页发布成果图如图5所示。


4 遇到的问题
扫描过程中因设站地点与标靶粘贴角度问题,以及扫描场地的限制,在后期数据拼接过程中,标靶中心点不能得到清晰的识别,然而采用寻找特征点(墙角,房檐等)的方式拼接,导致拼接误差很大。故最终需重新获取不合格的标靶信息,对于不合格的标靶信息,采用直接获取标靶中心点的方式,虽然采用这种方式降低了工作效率,但是减少了后期数据拼接的工作量,同时也大大减小了数据拼接的误差。
5 结语
本文介绍了徕卡P30三维激光扫描仪获取空间数据的基本工作原理及工作流程,通过对农水实验场场地的扫描,完成了从数据获取、数据拼接、数据滤波、三维建模以及网页发布的整个流程,方便师生对现场进行远程浏览。下一步的研究试图将整个校园的建筑物进行全面扫描,建立一个完整的三维模型,并进行网页发布,为数字校园的建立提供可靠的技术支持。
[1] DINESH M, RYOSUKE S. Auto-extraction of Urban Features from Vehicle-Boren Laser Data[Z]. Symposium on Geospatial Theory Processing and Application, Ottawa,2002.
[2] 张慧霞,陈宜金,刘国波.基于三维激光扫描仪的校园建筑物建模研究[J].测绘工程,2010,19(1):32-38.
[3] 刘 春,杨 伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察,2006(4):47-50.
[4] 赵 煦,周克勤,闫 利,等.基于激光点云的大型文物景观三维重建方法[J].武汉大学学报,2008,33(7):684-687.
[5] 宫丽玮,张 毅,闫 利.基于Cyclone和PolyWorks的三维建模实现[J].地理空间信息,2012,10(5):38-49.
Application of 3D laser scanner in campus building modeling
Tian Zhenxing Wang Bo Fan Tianyu Dong Hao
(NorthChinaInstituteofWaterConservancyandHydroelectricPower,Zhengzhou450045,China)
In this paper, it introduced the working principle and working process of the 3D-laser scanning. Finally, through an example realize the establishment of the campus building model and web publishing, it has provided reliable technical support for establishing digital campus.
3D-laser scanning, building, point cloud data, digital campus
1009-6825(2017)21-0191-02
2017-04-27
田振兴(1992- ),男,在读硕士; 王 博(1987- ),男,博士,讲师; 范天雨(1992- ),男,在读硕士 董 浩(1992- ),男,在读硕士
P234
A
猜你喜欢
模具制造(2019年3期)2019-06-06
电子制作(2018年10期)2018-08-04
魅力中国(2018年5期)2018-07-30
测绘工程(2018年3期)2018-03-20
电子制作(2017年2期)2017-05-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
电子测试(2015年18期)2016-01-14
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
