
智能助餐机器人的设计
2017-09-08 07:31孙海欣曹志强
长春大学学报 2017年8期
孙海欣,曹志强,2
(1.长春大学 电子信息工程学院,长春 130022; 2.杭州迪普科技股份有限公司,杭州 310000)
智能助餐机器人的设计
孙海欣1,曹志强1,2
(1.长春大学 电子信息工程学院,长春 130022; 2.杭州迪普科技股份有限公司,杭州 310000)
以KL26Z256ZLL4单片机为控制核心,结合红外对管、超声波模块、干簧管、ISD1820语音模块、电机驱动模块以及迪文串口屏,设计一款智能助餐机器人。该系统可自主完成路径识别,障碍识别减速及提醒处理,点餐和送餐的功能。通过使用红外对管进行路径检测,保证路径识别的准确性和稳定性;通过超声波模块、语音模块和电机驱动模块的配合,完成对前方道路的行人进行障碍识别及语音提醒。
助餐机器人;点餐;送餐;避障
0 引言
随着经济及餐饮行业的快速发展,人们的餐饮消费能力不断提高,各种新兴的餐饮形式不断涌现。高昂的人工成本、餐饮市场激烈的竞争,导致没有特色没有品牌的经营往往濒临倒闭,整个餐饮市场可以说是盈亏参半。据国内贸易部服务消费司统计,餐饮行业盈利的只有40%,保本或微利的占30%,剩下的30%就面临亏损。因此,减小餐饮行业的运营成本迫在眉睫。
近年来,服务型机器人已走入广大研究者的视野,各个研究机构或者是高校实验室都开始对其进行研究[1-3]。如今,由于相关技术的成熟和服务型机器人广阔的发展前景,服务型机器人已逐渐从研究所和高校走出,并且越来越受到商业界和企业的注意。在发达国家已经开发出一些商业化的服务机器人产品。根据餐饮行业对服务型机器人的要求,本文设计一款餐厅智能助餐机器人[4-7],该机器人可自主完成路径识别、障碍识别减速及提醒处理,点餐和送餐的功能。不仅节约人力成本,还满足人们对生活智能化的需求。
1 总体设计方案
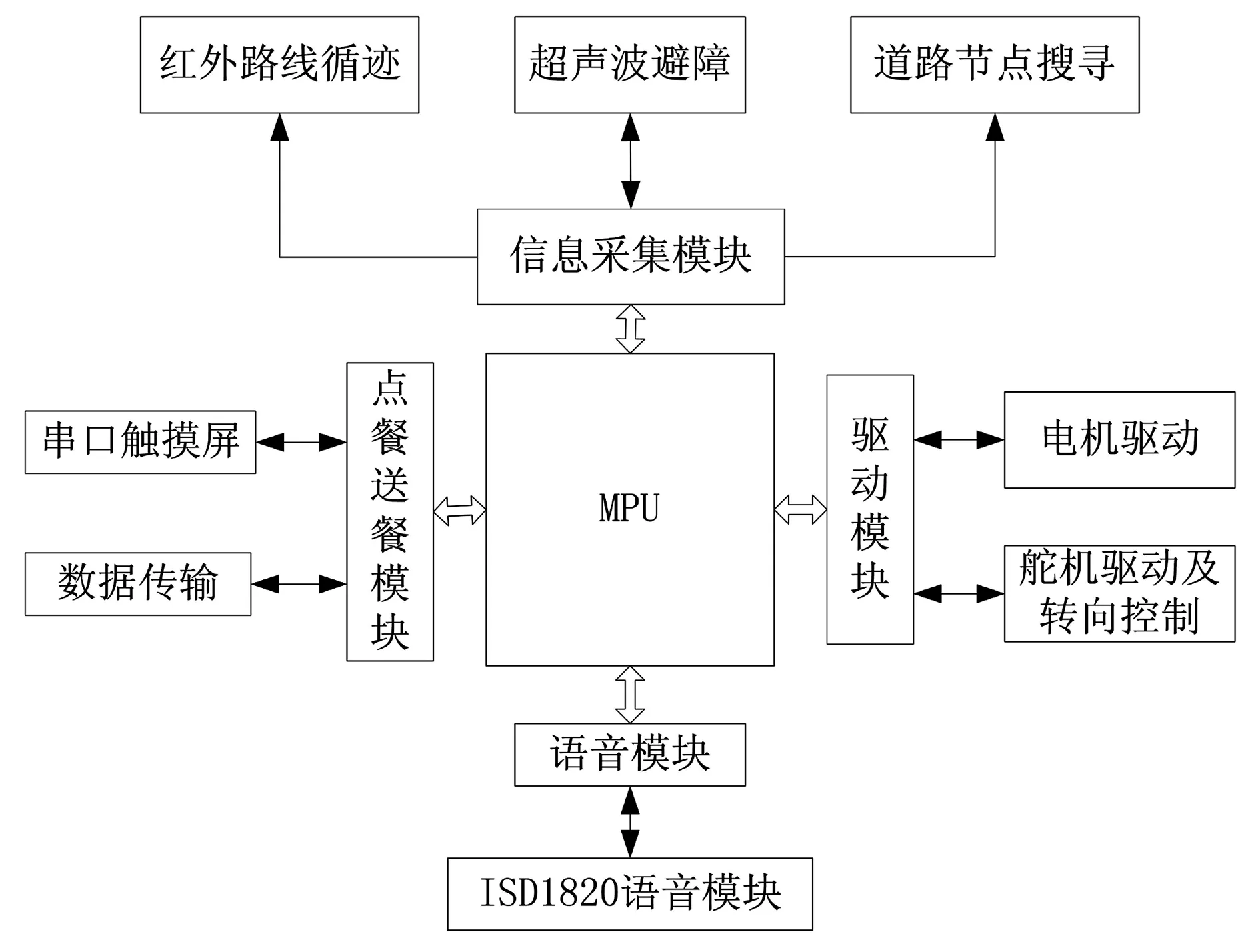
图1 整体系统框架
本文设计的智能助餐机器人系统由控制模块、信息采集模块、点餐送餐模块、驱动模块、语音模块五部分构成。系统框图如图1所示。其中,控制模块使用恩智浦公司的KL26Z256ZLL4芯片作为控制核心,它接收系统各个传感器的实时信息,进行数据处理及相应控制。信息采集模块使用红外传感器,HC-SR04超声波传感器和干簧管来采集道路信息。点餐送餐系统通过串口触摸屏实现,型号为迪文科技有限公司的DWT48270M50-06WT,通过串口触摸屏,用户可以实时选择座位号点菜等交互。此外,通过蓝牙模块将点餐的菜单传送到PC端,PC端接收相应信息。信息采集模块主要检测道路信息,通过控制模块进行数据处理,然后通过驱动模块控制电机差速实现机器人循迹行驶[8-10]。语音模块在特定场景下由控制芯片控制播放语音。例如,提醒用户点餐、提醒用户用餐、在行驶过程中检测到障碍后提醒让路等[11-12]。
2 系统硬件设计
2.1 单片机最小系统设计
本设计主要采用KL26系列的100脚MKL26Z256VLL4芯片作为核心控制芯片。芯片引脚包括了电源引脚、调试/编程接口、晶振接口、复位引脚、通用I/O引脚和复用引脚。由于该芯片内部集成的功能较多,因此在芯片设计时,内核内部把多个功能复用到相同的引脚上,从而减少引脚数。可通过修改复用寄存器来修改相应引脚的功能。本设计主要使用引脚的GPIO功能,UART功能和TMP功能。单片机最小系统电路如图2所示。

图2 单片机最小系统电路原理图
2.2 电源电路
本设计系统使用两种电压,分别为3.3V电压和5V电压。其中,3.3V电压标准主要给单片机供电,5V电压标准主要给外围电路供电。本文采用电池作为系统输入电压,提供7.2V电压。通过LM2940将7.2V电压转变为5V电压,再通过稳压芯片ASM1117将5V输入转换成3.3V输出,以给单片机供电。
2.3 信息采集电路
信息采集电路主要使用红外循迹电路,HC-SR04超声波传感器和干簧管来采集道路信息。红外传感器用于餐厅助餐机器人的道路循迹,要求机器人能准确快速分辨出餐厅内部的道路,从而让机器人按规定的轨迹行驶。红外循迹电路如图3所示。

图3 红外循迹电路
超声波模块主要检测车体前方障碍。模块自动发送8个40khz的方波,自动检测是否有信号返回,若有信号返回,IO口输出一高电平,高电平持续的时间就是超声波从发射到返回的时间,距离计算公式为:
距离=(高电平时间*声速)/2
(1)
一旦发现前方障碍,就会触发单片机中断。本系统使用的HC-SR04超声波模块能准确检测到1米内的障碍,其精度能达到0.5cm。
干簧管主要用于检测道路节点处的强磁铁。通往每张餐桌的巡航线的节点处设有强磁铁,通过检测强磁铁触发干簧管的次数来区分不同的餐桌。
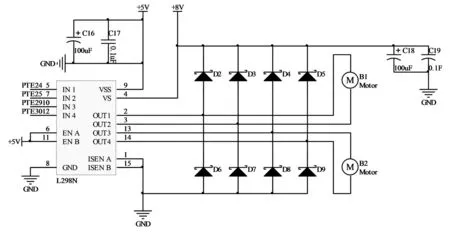
图4 电机驱动电路
2.4 电机驱动电路
电机驱动电路有三个功能:为电机提供提供驱动电流;改变电机极性及实现电机的正反转变化;实现对电机的调速(需要软件配合,即单片机产生PWM波)。本设计通过使用L298N芯片实现电机的驱动,其驱动原理如图4所示。
3 软件设计
3.1 显示屏界面及通信设计
本系统使用DGUS Tool进行显示界面的设计,DGUS Tool为迪文公司为其显示屏设计的图形界面开发软件。在该软件环境中,开发者能实现对现实界面人机交互系统的设计。显示屏部分界面如图5所示。显示屏与单片机使用串口通信,在界面设计时需要规划好通信协议,一条完整的串口数据如表1所示。


表1 串口通信数据结构
3.2 单片机程序设计

图5 程序流程图
单片机程序设计是在IAR Systems环境下,使用C语言对系统各项功能进行软件开发。首先,依据硬件电路和各模块技术手册,对各模块进行编程,在单独测试后,进行整体联调、分析系统程序,并对其进行测试、修正,最终形成稳定成熟的软件系统。程序流程图如图6所示。
系统工作流程为:当有顾客需要点餐时,服务员在触屏的座位号选择界面选择相应座位,选择完成后助餐机器人沿巡航线移动,行进过程中时刻判断道路节点和是否有障碍物,若有障碍,则停止,等待,同时语音提示“您好,请让路”;若检测到节点,则进入对应子程序,进行停车或者转弯;到达终点后语音提示“欢迎光临,请点餐”并等待。顾客完成点餐后,发送点餐数据到PC端,助餐机器人沿原路返回。
当需要机器人送餐时,服务员在触屏的座位号选择界面选择相应座位,选择完成后机器人沿巡航线移动,行进过程中时刻判断道路节点和是否有障碍物。若有障碍,则停止,等待同时语音提示“您好,请让路”;若检测到节点,则进入对应子程序,进行停车或者转弯,到达终点后语音提示“欢迎光临,请取餐”并等待。客人取完餐后,点击返回,机器人沿原路返回。
4 结语
本文设计的助餐机器人应用于餐厅场景,可循迹驶向指定餐桌,并搭载点餐触摸屏,实现餐厅智能点餐和送餐。本设计在理论分析的基础上,根据总体方案确定系统的组成。对系统的每一个模块进行元件的选型和电路设计,在完成硬件电路设计和机械结构的搭建后,进行程序流程的规划,完成程序流程图,然后进行单片机软件和触摸屏的操作界面的编写,最终完成本设计。系统最终实现了智能点餐和送餐、障碍检测、路径识别及语音提醒等功能。可以预见,本文设计的餐厅智能助餐机器人具有广阔的市场前景和重要的研究意义,符合当今人们对生活智能化的要求,可节省餐厅的人力成本。
[1] Yamazaki K, Ueda R, Nozawa S, et al. Home-assistant robot for an aging society [J]. Proceeding of the IEEE, 2012,100 (8): 2429-2441.
[2] Engelberger, Helpmate G. A service robot with experience [J]. IndustrialRobot, 2008, 22(2):101-104.
[3] Brooks R A. Intelligencewithout Representation [J] .Artificial Intelligence, 1991(47): 139-160.
[4] 姜山. 服务机器人[J]. 机器人技术与应用,2004(2):10-14.
[5] 王田苗, 陶永, 陈阳. 服务机器人技术研究现状与发展趋势[J].中国科学: 信息科学,2012, 42(9):1049-1066.
[6] 赵立军. 室内服务机器人移动定位技术研究[D]. 哈尔滨: 哈尔滨工业大学,2009.
[7] 徐扬生. 智能机器人引领高新技术发展[J]. 企业科协,2010(9):28-31.
[8] 赵坤, 赵书涛. 基于引导线的变电站巡检机器人视觉导航[J]. 电源技术应用,2013(6) :421-421.
[9] 俞辉,李永,刘凯. ARM 嵌入式Linux系统设计与开发[M]. 北京: 机械工业出版社,2010.
[10] 舒畅,熊蓉,傅周东.基于模块化设计方法的服务机器人结构设计[J]. 机电工程,2010,27(2) : 1-4.
[11] 胡振旺.基于STM32的家庭服务机器人系统设计[D].广州:广州工业大学, 2015.
[12] 陈钰键.智能服务机器人软件系统设计[D]. 沈阳:东北大学, 2011.
[13] 朱世强, 刘松国. 我国机器人产业化发展战略探讨[R]. 全国先进制造装备与机器人技术高峰论坛, 2008.
责任编辑:程艳艳
Design of Intelligent Meal-assisted Robot
SUN Haixin1, CAO Zhiqiang1,2
(1. College of Electronic Information Engineering, Changchun University, Changchun 130022, China;2. Hangzhou DP Tech Co., Ltd, Hangzhou 310000, China)
This paper, combining with infrared emitting diode and photodiode, ultrasonic module, tongue tube, ISD1820 voice module, motor driving module and Devin serial screen, designs an intelligent meal-assisted robot which uses KL26Z256ZLL4 microcontroller as the control core. The system can accomplish the path recognition, obstacles identification slowdown and reminding processings, as well as meal ordering and meal delivery functions. The path detection is realized by infrared emitting diode and photodiode to ensure the accuracy and stability of the path identification. The obstacle recognition and voice reminding are completed by the combination of the ultrasonic module, voice module and motor driving module.
meal-assisted robots; meal ordering; meal delivery; obstacle avoidance
2017-07-20
孙海欣(1983-),女,黑龙江依兰人,讲师,博士, 主要从事脑电信号处理及嵌入式系统开发方面研究。
TP242.6
A
1009-3907(2017)08-0018-04
猜你喜欢
——基于史密斯政策执行模型
新疆开放大学学报(2022年1期)2022-06-16
杭州(2022年1期)2022-02-12
电子制作(2019年13期)2020-01-14
海峡姐妹(2019年10期)2019-11-23
中国食品(2019年4期)2019-09-10
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年15期)2019-08-27
电子制作(2019年14期)2019-08-20
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
