变胞机器人
2017-09-08 14:23张春松唐昭
物联网技术 2017年8期
张春松+唐昭

摘 要:文中利用变胞机构的变结构特点开发出了一款变胞机器人,大大提高了爬行机器人的行走稳定裕度、避障能力、攀爬能力、拐弯能力即对复杂环境的适应能力等。具有良好的社会效益与经济效益。
关键词:四足变胞机器人;虎克铰
1 四足变胞机器人简介
本作品将一种空间六杆变胞机构运用到爬行机器人的腰部设计中。利用变胞机构变结构特点开发出四足变胞机器人。四足变胞机器人的显著特点在于能够随意变形,且其爬行性能也得到了明显提高。
四足变胞机器人具有平面和空间两种构态。在平面构态下,四足变胞爬行机器人可以灵活变换腰部形态,如图1所示,进而改变四条腿的相对布置方式,以改变其行走方式,灵活适应各种窄道、弯道和障碍物。在空间构态下,四足变胞机器人可以轻松实现腰部的拱仰,如图2所示,进而适应凹凸不平的地面及上下坡等环境条件。可见变胞机构的引入,使得爬行机器人能够适用于所有路面环境。这是轮式,履带式机器人所不具备的。
变胞机构的应用提高了爬行机器人诸多性能指标,如行走稳定裕度、避障能力、攀爬能力、拐弯能力、步态协调性等,有助于提高爬行机器人的灵活性和对复杂环境的适应能力。
2 工作原理
文中主要讲述用于四足变胞机器人腰部的变胞六杆机构的特征,以此阐明变胞仿生机器人的技术细节和工作原理。
2.1 技术细节
通过分析图3所示的自然界中爬行动物腰部脊椎骨骼结构,我们发现其结构对应于机构运动副中的虎克铰。同时考虑到各种动物腿的相对位置关系,提出了可变腰的概念。由此我们创造性的将平面六杆机构中的两个转动副换成了虎克铰,得到一种具有多种构态的空间六杆变胞机构,如图4所示。
上述空间六杆变胞机构具有多种构态,每种构态下机构拓扑结构以及自由度均不相同。由上图可以看出,前三條腰杆由轴线相互平行的两个转动副连接,因此前三条腰杆始终共面(前半腰平面)。同理,后三条腰杆也始终共面(后半腰平面)。左右两个虎克铰水平方向的转动轴线都在这两个平面上。根据这两条交线是否共线可以得到两种不同的构态,即平面构态和空间构态。
平面构态:当两个虎克铰水平方向轴线不共线时,根据几何学基本定理——两相交平面有且仅有一条交线可知,此时前后两个半腰平面重合,故两虎克铰中的水平方向轴线不能转动,被锁死。此时,该机构等价于一个三自由度的平面六杆机构,如图5(a)所示。
空间构态:当两个虎克铰水平方向的轴线共线时,前后两半腰平面可以绕该共线的轴线相对旋转,此时前后两个半腰平面不再重合,且只要前后半腰平面不共面,两虎克铰水平轴线就必共线。所以在该构态下,后半腰(深色)的两个转动副不能旋转(因为一旦旋转两虎克铰的水平轴线将不再共线),被锁死在90°的位置。这时机构等价于一个两自由度的空间四杆机构,如图5(b)所示。
两种构态的过渡是前后半腰平面共面且左右两虎克较的水平方向轴线共线,在过渡状态,该机构即可自由进入以上两种构态的任何一种。在平面构态中还有一种特殊情况,即在空间构态下,当前半腰平面绕虎克铰水平轴线(左右两虎克铰在空间构态下水平方向轴线共线)旋转180°后,前后半腰平面又共面,此时机构也是两种构态的过渡构态,如图6所示。特别是当前腰杆2和后腰杆2重合时,机构变成了一个两自由度的串联机构,如图7所示。
通过将上述空间六杆变胞机构作为爬行动物腰部结构,并在空间六杆变胞机构中四条较长的杆中点处对称布置四条腿即可得到变胞爬行机器人,如图8所示。
2.2 变胞机构改善爬行机器人性能的技术原理
变胞爬行机器人将变胞机构应用到多足爬行机器人的腰部,能够在运动过程中改变机构构态和自由度,实现了机构构型的改变。变胞机构使得多足爬行机器人腰部可变形,可以更好地模仿自然界爬行动物的脊椎腰部结构,调节姿态,增强运动灵活性。提高四足多足爬行机器人的灵活性和对不同地形环境的适应能力可扩大其使用范围。
(1)变胞爬行机器人的腰部可变形,可做运动和适应性调节。在遇到较窄弯道时,可使腰部扭转一个角度,顺利通过该弯道,而如果是刚性腰的爬行机器人则无法做到这一点,如图9所示。
(2)通过腰部机构变形,可以调节腰部的重心,使得腰部的重心始终处在稳定域中的最佳位置,如图10所示。可使变胞爬行机器人运行更加稳定。
(3)变胞爬行机器人可实现弓腰,仰腰,扭腰的动作,如图11所示。这些动作对爬行机器人运动适应性的调节大有裨益。这一点这是刚性腰机器人无法做到的。
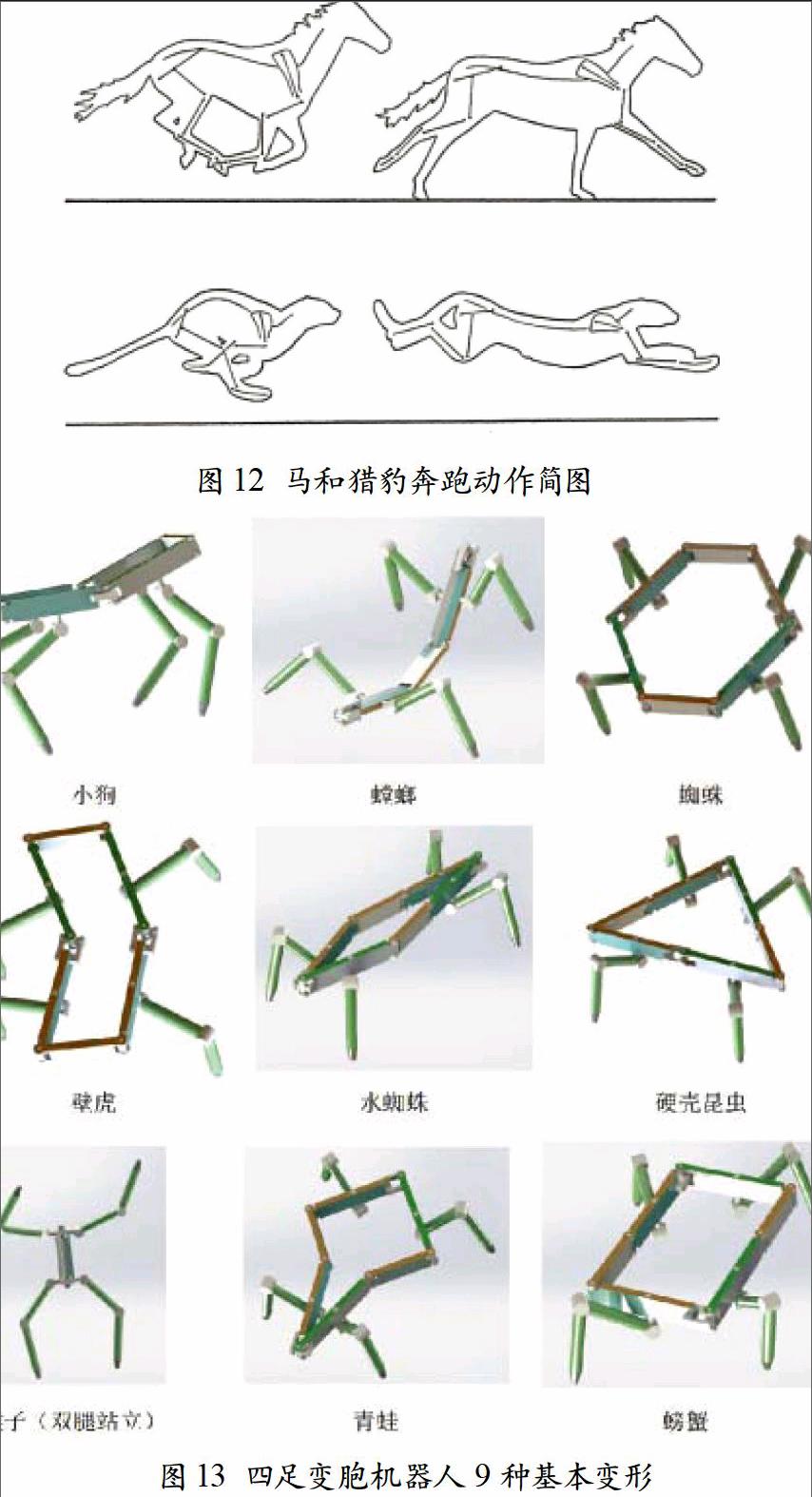
(4)通过腰部关节的运动可以在奔跑过程中起到缓冲和减震的作用,同时具有一定柔性的腰部可以大大提高机器人的奔跑速度,可通过马和猎豹的奔跑姿态和速度得到证实,如图12所示。
(5)通过腰的变化,爬行机器人不仅能改变各条腿之间的相对位置,还可改变腰部本身的形态和刚度,并综合以上两种变化,组合出多类动物形态,实现对多种动物形态的仿生,集各类动物的特点于一身,如爬行动物的灵活性,昆虫类动物的稳定性,哺乳动物的速度,节肢动物手脚共用等。图13所示是变胞机器人模仿上述四种动物形态的示意图。
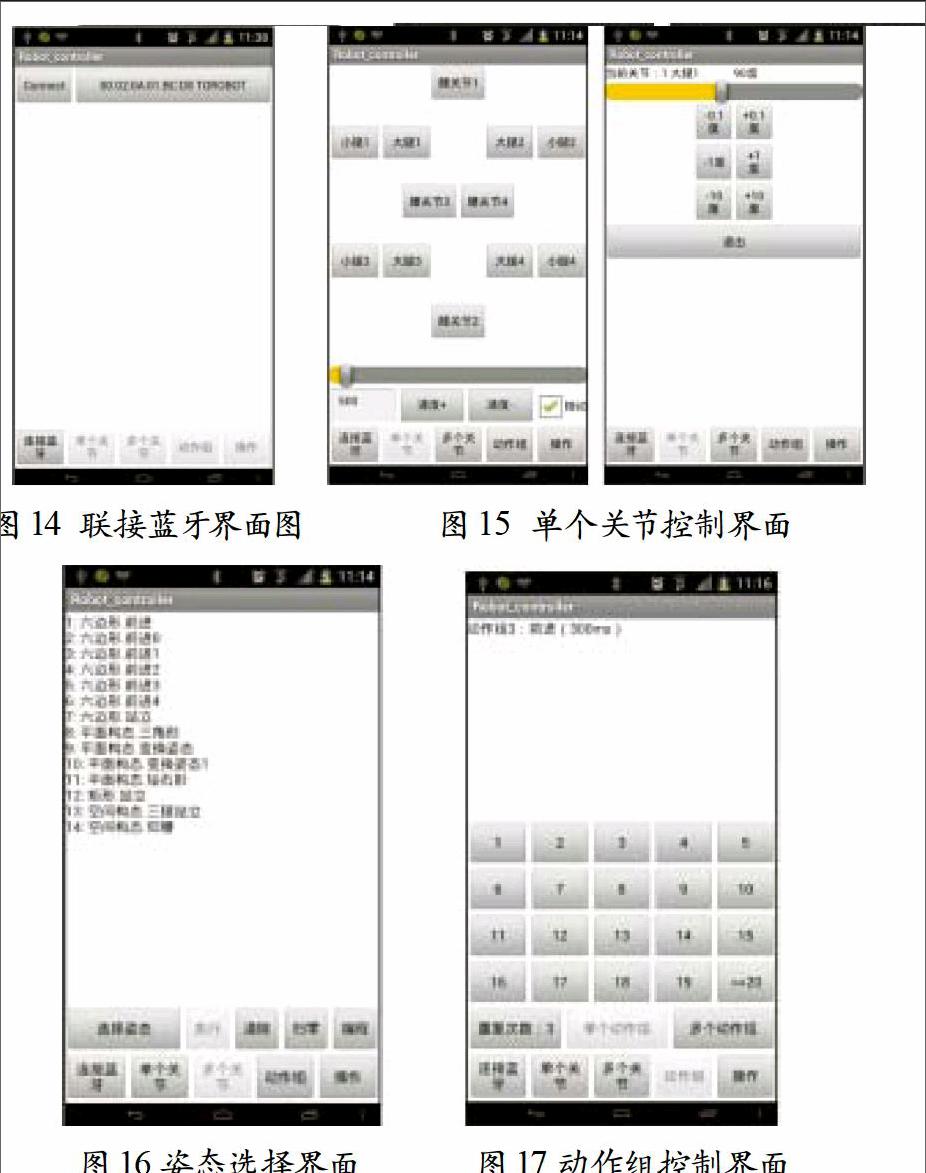
2.3 四足变胞机器人的控制方法
四足变胞机器人采用手机App控制方式。配备专用手机App,通过蓝牙传送控制数据。先进入选择蓝牙界面,该界面如图14所示,选择机器人的蓝牙ID号点击“Connect”使手机与机器人取得通信;然后选择不同的控制模式,即单个关节控制模式、姿态选择模式、动作组控制模式,分别如图15、16、17所示。
单关节控制模式和姿态选择模式相互配合使用。在单关节控制模式下,用户可以有针对性地调节机器人每个关节转动角度,方便用户设计机器人的姿态。用户把设定好的姿态保存并命名后,便可在姿态选择界面选择其设计的机器人姿态,机器人将运动到用户设定的姿态。设定的姿态可以按用户意愿排序,在姿态选择界面可以让机器人按照顺序依次变换,在某种程度上实现了机器人跳舞的效果。
动作组控制模式又分为单个动作组和多个动作组模式。在单个动作组模式下,用户按动一个按钮,机器人便执行一套动作。实现动作的程序已预先打包并存于机器人控制系统中,一个按钮对应一套动作。在多个动作组模式下,用户可以预先按多个按钮,然后按“执行”按钮,机器人将连贯执行用户选择的多套动作。同时用户还可以设置单个动作组和多个动作组的重复次数,使机器人重复单个动作组或多个动作组。
3 创新点
变胞机构于1998年首次提出,经历了18年的发展,目前仍属于国际机构学与机器人学的前沿。通过变胞机构在运动过程中改变机构构态和自由度,实现腰部构型的改变。从而更好地模仿各类动物的腰部结构,实现对多类动物仿生,集多类动物优点于一身,包括哺乳类动物的速度、爬行类动物的灵活性以及昆虫类动物的稳定性,进而提高多足仿生机器人的灵活性和对不同地形环境的适应能力。四足变胞仿生机器人有如下创新点:
(1)首次成功地将变胞机构应用到多足仿生机器人中;
(2)首次对机器人结构实现了变构型,变形态,即实现了真正意义上的变形金刚;
(3)实现对多类动物仿生,集多类动物优点于一身。
4 市场前景
变胞机构凭借其变结构和变自由度的特点,能提高机器人的环境适应能力,甚至实现“一机多能”,将在机器人领域得到广泛应用,发挥巨大价值。变胞机构的应用将为机器人行业带来巨大变革,未来的机器人将不再全是结构化的、固定形态、固定功能的机器人。
四足变胞爬行机器人作为首款成功运用变胞机构的机器人,其“变形金刚”般的能力必将受到大众欢迎,在教育娱乐机器人领域拥有巨大的市场前景。endprint
猜你喜欢
文萃报·周五版(2022年41期)2022-05-30
越玩越野(2021年3期)2021-06-15
装备制造技术(2020年11期)2021-01-26
机械设计与制造(2020年11期)2020-11-23
户外探险(2018年1期)2018-01-11
水利科技与经济(2017年10期)2017-04-25
金色少年(美绘小文学)(2017年2期)2017-04-18
少儿美术·书法版(2016年12期)2016-02-06
河南科技(2014年16期)2014-02-27
中医研究(2013年9期)2013-03-11