基于微信公众平台的智慧农业机器人
2017-09-08 16:47王昕波贾临殿
物联网技术 2017年8期
王昕波+贾临殿
摘 要:针对目前农业自动化存在的问题,文中设计了一款通过微信公众平台来操作的农业机器人。该设备实现了自动铁犁开垄沟、自动播种、灌溉以及微信远程获取农田实况的操作。使用者通过微信可以获取农田的各种信息,获取传感器的数值,实时监测实验农田的环境情况。通过实地测试可以看出,此农业机器人的准确性较高且具有较强的实用性。
关键词:农业机器人;微信公众平台;实时监测;传感器
中图分类号:TP242.3 文献标识码:B 文章编号:2095-1302(2017)08-0-02
0 引 言
20世纪中期,我国开展了有关农业机器人的研究。但因为农业环境的特殊性及技术的局限性,造成了许多问题。一方面由于很多关键技术有待进一步创新和完善,另一方面是季节性导致农业机器人效率较低与维护费用较高等问题[1]。随着我国人口老龄化趋势逐步加剧,从事农作的人口数量逐步减少,劳动力成本变高,实现农业机器人普及性的要求日益加剧[2]。随着手机功能日益强大,微信、QQ、微博各种手机应用更丰富了我们的生活。微信接口的开放可以为开发者提供通过微信公共号来控制硬件的条件,于是使用微信来实现操作农业机器人的想法便出现了。
1 系统总体设计
1.1 硬件系统设计
本设计采用S3C6410微处理器及各电路模块对视频信息及温湿度传感器的数据进行采集,开启WebServer服务,同时通过无线网络与互联网连接,将采集的数据通过浏览器向PC机客户端显示。客户端可通过浏览器对处理器进行控制[3]。主机S3C6410通过视频数据发送模块将现场搜集的视频流数据进行编码后,以无线传输的方式由计算机网络发送。对于接收的视频数据, 客户端可以进行实时播放[4]。系统软件采用C/S结构,两端由无线网络建立TCP/IP连接,并按照自定义数据通信协议交换数据,实现数据通信与系统控制的功能[5]。客户端发出连接请求,服务器端接收请求后发送信号,向客户端发送视频码流。并将采集到的各种数据通过无线网络传输到PC机上通过网页显示[6]。数据采集终端模块包括如下模块:
(1)超声波测距模块。
(2) DHT11温度传感器模块。
(3)摄像头。
(4) 紫外线传感器。
(5)土壤湿度传感器。
(6)W5100特性:与MCU有多种接口选择,即直接并行总线接口、间接并行总线接口和SPI总线接口;支持硬件TCP/IP协议: TCP, UDP, ICMP, IGMP, IPv4, ARP, PPPoE, Ethernet;支持ADSL连接 (支持PPPoE协议,带PAP/CHAP验证);支持4个独立的端口(Socket)同时连接;内部16 K字节存储器作TX/RX缓存[7];内嵌10 BaseT/100 BaseTX以太网物理层,支持自动应答(全双工/半双工模式);支持自动极性变换(MDI/MDIX);多种指示灯输出(Tx,Rx,Full/Duplex,Collision,Link,Speed);3.3 V工作电压,I/O口可承受5 V电压。
(7)Sina App Engine(SAE)公有云计算平台。
(8)MG996R舵机。
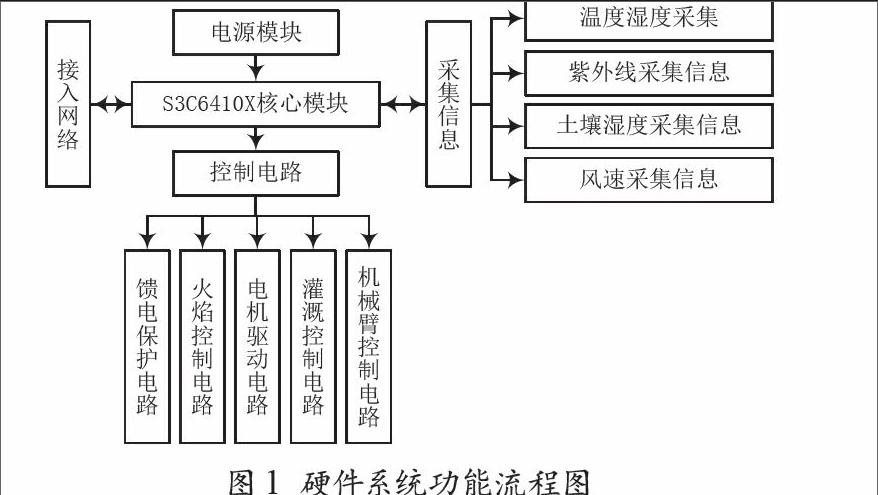
本部分主要以S3C6410X控制主板为中心,各模块检测到模拟量经处理后传输给控制主板,主板将数据进行转化,在交互界面上显示并做出相应调整[8]。硬件系统功能流程如图1所示。
1.2 软件系统设计
腾讯科技的微信接口的开放,为开发者调用微信高级接口功能提供了可能。微信是我们生活中必备的应用软件,所以我们设计通过微信查看农田环境情况。只需关注微信公众平台号,就可以通过发送简单的指令来查看农田里机器人的状态[9]。通过以太网卡将传感器上传的农田土壤湿度、农田环境温度湿度、风速、紫外线强度等上传到新浪SAE服务器[10]。微信公共号控制S3C6410硬件实现流程如图2所示。
2 测试与分析
我们将该农业机器人进行了现场实地测试,测试的功能包括土壤温度测试、农田温度测试、农田紫外线强度测试及其他测试。经测试,该农业机器人能够对农田进行实时监测与准确测量,同时也具有很强的环境适应能力。
2.1 查看采集的土壤湿度
土壤湿度传感器如图3所示。
2.2 查看采集的环境温度
温湿度传感器如图5所示。
3 结 语
本文设计的产品可以帮助农业科研人员和普通用户对农田进行研究时方便的获取农田的精确数据。利用微信公共号来获取信息,突破空间、时间的限制。该系统对农业生产活动起指导作用,实用性强。使用微信公共平臺对硬件进行驱动是对现代农田建设系统新的突破点。
参考文献
[1]沈明霞,姬长英.农业机器人的开发背景及技术动向[J].农机化研究,2000(2):31-35.
[2]徐崇庶,张博玲.欧美国家中的农业机器人[J].机器人技术与应用,1998(3):12-13.
[3]胥芳,张立彬,计时鸣,等.设施农业中的机械化装备及其技术发展[J].浙江工业大学学报,2001,29(2):136-141.
[4]崇岭.西瓜收获机器人[J].机器人技术与应用,1998(5):21-22.
[5]王新忠.温室番茄收获机器人选择性收获作业信息获取与路径规划研究[D].镇江: 江苏大学,2012.
[6]宋伟科.基于多机器人的开放式智能控制系统关键技术研究与开发[D].天津:天津大学,2012.
[7]王欢,王玉博,尚萌,等.轮式移动机器人的主控制器设计[J].电工文摘,2014(5):20-22.
[8]王会方.串联机器人多目标轨迹优化与运动控制研究[D].杭州:浙江大学,2011.
[9]陈卫东,董胜龙,席裕庚.基于开放式多智能体结构的分布式自主机器人系统[J].机器人,2001,23(1):45-50.
[10]张鑫.移动机器人导航中的轨迹跟踪与群集运动控制研究[D].西安:长安大学,2012.endprint
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
中国教育信息化·基础教育(2016年9期)2016-10-18
中国教育信息化·基础教育(2016年9期)2016-10-18