高速摄像在车辆碰撞试验中的应用
2017-09-28 07:56刘天明刘春艳
电子测试 2017年8期
刘天明,刘春艳
(1.中国第一汽车股份有限公司技术中心,吉林长春,130011;2.长春理工大学光电信息学院,吉林长春,130012)
高速摄像在车辆碰撞试验中的应用
刘天明1,刘春艳2
(1.中国第一汽车股份有限公司技术中心,吉林长春,130011;2.长春理工大学光电信息学院,吉林长春,130012)
本文以正面碰撞为例,围绕高速摄像机参数配置和镜头的选取等方面进行分析。通过计算方法,建议了具体的配置参数。为避免在试验过程中出现不必要的损失提供理论基础。
碰撞试验;高速摄像;镜头;拍摄速度;曝光时间
0 引言
实车碰撞试验是综合评价汽车碰撞安全性能的最基本、最有效的实验方法。从1999年10月颁布汽车碰撞技术法规CMVDR294《关于汽车正面碰撞乘员保护的设计规范》以来,国内许多汽车生产厂家,按照CMVDR294法规的要求,进行了实车正面碰撞试验,实车碰撞试验是在100ms内完成不可重复再现的试验,在碰撞过程中碰撞车辆车身变形,假人运动状态,安全气囊的展开状态等具有不可预见性,仅使用传感器测量方法很难全面直观了解全过程。从全面掌握转瞬即逝的汽车碰撞过程这一点上看,高速摄像是实车碰撞试验中十分重要的环节。本文参考FMVSS No.208 100%正面碰撞对高速摄像的要求,分析如何配置高速摄像系统。
1 高速摄像机简介
首先介绍高速摄相机,它是整个系统的基础。高速摄相机与普通的单反相机的成像原理类似,光线透过镜头投影到感光原件(CCD或者CMOS)上感光,然后通过数据线将拍摄到的景象呈现在取景器上(一般用笔记本)。这种构造,确定了它是完全透过镜头对焦拍摄的,因此对于成像而言镜头和感光原件的配合使用就整个系统的基础,其地位不言而喻。其中最为重要的是感光原件,目前高速摄像机(以下简称相机)的生产商大多使用CMOS传感器。CMOS影像传感器将每一画素的电荷转换成电压,读取前将其放大,这个过程中噪声信号也就被一起放大了,表现在画面上就是在图像上出现彩色的斑点,因此信噪比是这种传感器的重要参数。与信噪比相关的另一个指标是传感器的尺寸,面积越大捕获的光子越多,感光性能越好、信噪比越高,获得的图像质量也就越好。
2 镜头的选取及参数确定
在高速摄相机选定的情况下,如何选择与之匹配的外部设备以及相机参数的设定将是本文的重点。首先分析一下镜头的选择,主要从镜头的焦距和光圈值的设定两个方面研究镜头的使用。为了使用方便有一些试验人员使用大范围变焦的变焦镜头,这样可以固定相机位置,通过调整镜头来到达理想的拍摄范围。与变焦镜头相比,定焦镜头的成像质量好,一般光圈也较大,所以用于拍摄速度快图像质量要求高的碰撞试验更具有优势。下面以定焦镜头为例对镜头焦距和光圈的定量计算公式进行推导,分析镜头的使用。
2.1 镜头焦距选择
为了获得预期的摄像效果,在选配镜头时,应着重注意几个基本要素:
A)被摄物体的大小——U:景物实际高度、H:景物实际宽度
B)被摄物体的细节尺寸——u:图像高度、h:图像宽度
C)被摄物体的运动预期趋势和范围
D)物距— —D:镜头至景物实测距离
E)焦距— —f:镜头焦距
F)后焦距— —v:图像至镜头距离
考虑到碰撞后的反弹和碰撞碎片的飞溅,为了确保相机在安全范围内工作。一般将D值设定为6m,对于碰撞试验使用的镜头来说,可以认为物距为∞,而像距近似的认为v=f,最终覆盖景物镜头的焦距可用下述公式计算:


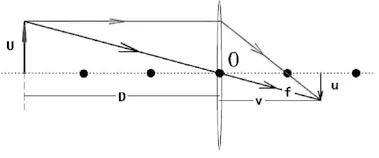
图1
下面以图2(参考FMVSS No.208 100%正面碰撞)拍摄范围和相机位置为例,具体的分析如何确定镜头型号。
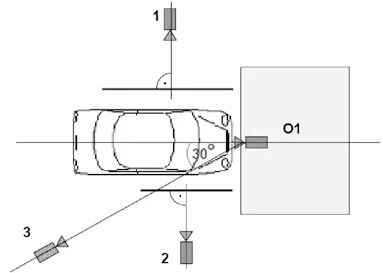
图2
镜头到拍摄目标距离:1、2、3号相机为6m,O1号相机为1.5m;拍摄宽度范围:1号拍摄整车(除去后备箱)情况尺寸4m,2号拍摄假人运动及发动机舱情况尺寸2.2m,3号从后面拍摄假人与气囊接触情况尺寸1.2m,O1号从斜上方拍摄假人与气囊接触情况尺寸2m;传感器宽度即图像宽度为18mm。将上面一系列数值代入公式2,再综合目前的可选的镜头型号规格,可以得出分别应该使用28mm、50mm、85mm和14mm。另一方面,由于光学镜头本身以及摄像机成像平面与景物平面存在倾角和转角,所以获取的图像存在非线性几何畸变①。所以使用各种规格的镜头拍摄的画面都会产生不同程度的变形,比较上述镜头规格,其中焦距为50mm的镜头在视角方面与人眼的视角最为接近,因此拍摄的画面给人的感觉最真实。在同样的条件下,它的几何畸变相对较小,在图像后处理时分析的结果相对较准确,所以如果没有相关的标定工具的情况下,对于最关心的区域和位置上应该尽可能多的使用这种镜头。长焦距的镜头类似望远镜的作用,可以将被拍摄物体“拉到眼前”,适合于捕捉细节。另外的两个焦距小的镜头我们称为广角镜头,一般用在空间有限但要求画面范围大的位置。
2.2 光圈值的确定
确定了上述的几个镜头的焦距,再来确定镜头的另外一个参数光圈值大小。光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,它通常是在镜头内。表达光圈大小我们是用f值(光圈f值=镜头的焦距/镜头光圈的直径)。这里值得一提的是光圈 f 值愈小(见图3),在同一单位时间内的进光量便愈多,而且上一级的进光量刚好是下一级的两倍,例如光圈从f5.6调整到f4,进光量便多一倍,我们也说光圈开大了一级。光圈对拍摄的影响主要在于两个方面:进光量和景深。进光量越多对于相机的性能参数要求越低。这里又引入了景深的概念。
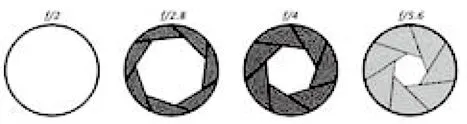
图3
一个物体通过镜头成像,在理想状况下是点与点一一对应的,但实际上,由于光波的性质、像差的影响,物体上的点经镜头成像后可能就不是一点,而是成了一个圆点。由于人眼的分辨能力(视力)的局限,如果该圆足够小,就被看成一点,该点就是容许弥散圆。由于容许弥散圆的存在,聚焦完成后,在焦点前后的范围内都能形成清晰的像,这一前一后的距离范围,便叫做景深。
景深的计算公式:
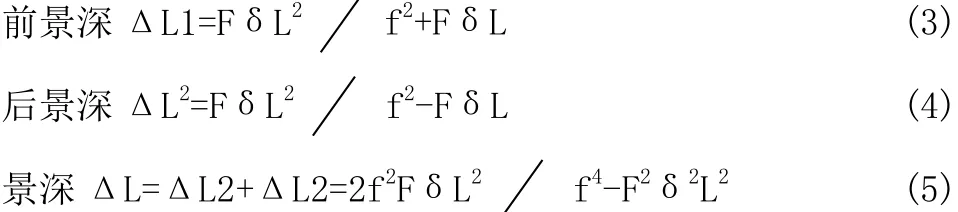
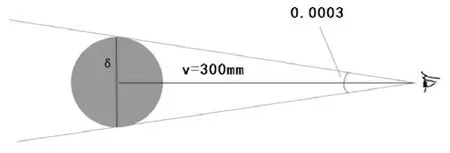
图4
其中:
δ——容许弥散圆直径
f —— 镜头焦距
F——镜头的拍摄光圈值
L —— 对焦距离
ΔL1 —— 前景深
ΔL2 ——后景深
ΔL —— 景深
对于容许弥散圆直径见图4,假定观察者距离图像为300mm,把人的视觉极限定为1分,即0.0003弧度。通过19"显示器分析高速摄像拍摄的图像。这样确定δ为0.0075mm。继续使用上面的正面碰撞的例子进行分析,如果距离车辆6m处使用高速摄像机,并且配装50mm的镜头。可以得到下表的结果。我们来分析一下这组数值对我们来说有什么意义。轿车的内部宽度一般在1.5-1.8m范围之内。如果将光圈设定为8,那么我们几乎能将整个车内情况看得清楚。这在观察者看来是十分满意的,但是对于一些后处理软件这样的景深可能会带来不必要的麻烦。人在观察时一般首先确定假人的轮廓线,将假人的各个目标点限定在轮廓线范围之内,将其作为假人的一部分分析。而图像后处理软件,在进行目标点跟踪的过程中,是通过目标点的特性实现点的定位的,所以在一定范围内出现的具有相同特征的标记点,都有可能被误认为是该点。如果设置镜头光圈为5.6的话,根据经验假定两假人的间距大约为670mm。在进行软件分析时,两个假人各部分的运动由于“过分清晰”可能会互相干扰,因为软件无法在平面的图形上识别这条“胳膊”到底属于“哪一个人”。这种情况下,如果将光圈设定为4或者更大的2.8,将会改善上述情况。对于要求进行后处理的拍摄录像,镜头光圈值4应该为临界值。而且光圈越大,摄像机的拍摄速度和快门速度也就越快,这对于拍摄高速运动的物体更有利。这将会在下面文章中进一步详细的说明。
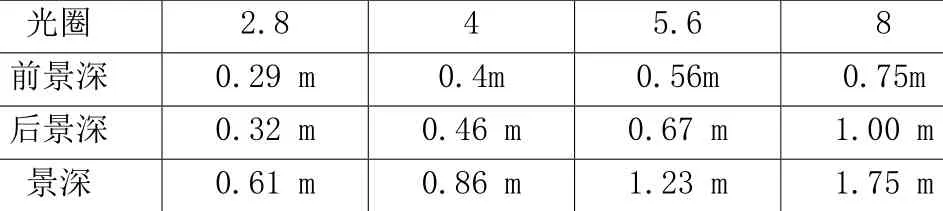
光圈 2.8 4 5.6 8前景深 0.29 m 0.4m 0.56m 0.75m后景深 0.32 m 0.46 m 0.67 m 1.00 m景深 0.61 m 0.86 m 1.23 m 1.75 m
3 高速摄像机参数的设定原则
在这部分中我们要确定的是高速摄像机拍摄速度和快门速度。它们决定了进光量的多少以及图像的质量高低。对于静止的拍摄对象,拍摄速度越慢,相机传感器得到的光线信息越充分(光通量越大),拍摄的图像上的噪点越少,效果也就更好。但是对于拍摄运动的对象,特别是碰撞试验中这样高速运动的车辆,拍摄速度过慢,可能会产生“拖尾”现象。因为从拍摄原理角度讲,照片是记录一个时间点的图像。在这一个时间点里,传感器如果记录了几个时间点的光,由于只有一个时间点的记录,因此,几个时间点的图片就重合在一起。拍摄目标运动的速度大于拍摄速度,拍摄的图像就会不清楚,严重时甚至难以辨认拍摄对象,图像就产生了“拖尾”。我们都知道静止和运动是相对的概念,对于整车碰撞试验目前公认的合理拍摄速度为1000fps。这是为什么呢?通过下面的计算我们可以得出最理想的图像信息。

V——目标运动速度
X——拍摄范围
F——像机拍摄速率
R——像机分辨率
E——曝光时间(快门速度的倒数)
Pixel——曝光时间内移动的像素数
根据经验,当Pixel 5时,我们可以获得清晰的。对于图2中的1号高速摄像机,假定整车的碰撞速度为50km/h,CMOS传感器的水平方向的像素为1600,拍摄范围为4m。为了方便计算和表述,拍摄速度选取10的整数次幂,分别为100 fps、1000fps、10000 fps,应用公式(6)、(7)进行计算 Pixel 分别为 56.7、5.67、0.567,这组值当中对应最接近5的拍摄速度为1000fps,如果拍摄速度为100那么就不能获得理想的图像,如果为10000那么将会大幅度提高成本,而且对于碰撞试验这样的速度级别也是没有必要的,因此选取这个速度为整车碰撞试验的拍摄速度。但是显而易见的是,如果以同样的快门速度的进行拍摄,很难在每一个位置上都得到理想的图像。这样我们就可以通过提高快门速度方式得到理想的图像。用同样的公式可以得出极限的快门速度。以图2中的几种相机的使用情况为例,可以计算出他们的最长曝光时间分别为:1号880us;2号485us;3号265us;O1号440us。快门速度的快慢还会影响拍摄物体位置度精确程度,也就是物体的真正位置与图像中的位置之间的差距比较大。由于物体是连续运动的,无论快门速度多么快,理论上拍摄得到的位置都会与实际位置之间存在偏差,但是不同的快门速度下偏差值是不同的。进行下面的试验,以重量170克直径57.2mm的小球进行自由落体如图5所示,图6是小球释放下落后0.85m时,在不同的快门速度下拍摄到的小球位置,虚线为理论位置。以不同的快门速度经过多次试验发现,加快快门速度偏差最值逐渐减小,曝光时间为0.5ms时,偏差最小值开始出现,进一步提高快门速度,该值基本保持不变②。综合上面因素,一般将情况下设定曝光时间小于400us。考虑到碰撞过程为减速过程,头部的瞬时最大加速度值以及出现的时刻等原因,3号相机也可以设置为400us。这样对于光场和光圈的要求比较宽松,而且不会影响的测量结果。
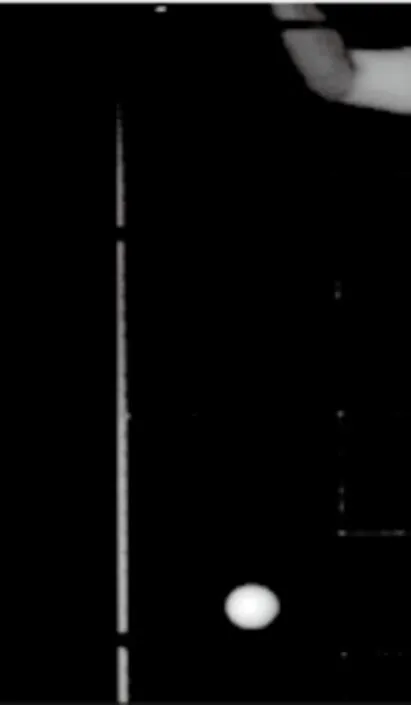
图5
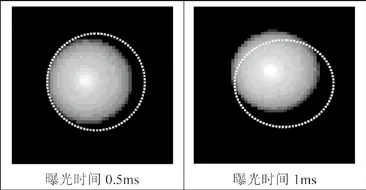
图6
4 结论
本文为高速摄像系统的配置提供了部分理论公式和参数设置建议。通过计算可以避免在试验过程中的失误,减少不必要的损失。这样的设置并非绝对的,因为快门速度、光圈、焦距、分辨率还有光场强度等因素相互影响,在试验过程中积累经验,综合的应用高速摄像系统的各个部分,它们将不仅仅能够为我们提供漂亮的画面,更重要的是能够弥补传感器测量方法在碰撞实验中的不足。
[1]梁锐等.汽车碰撞图像几何畸变校正.中国汽车工程学会学术年会 SAE-C2003T371.
[2]苏振凯等.数字高速摄影机最佳快门速度之探讨.北体学报(台湾),第十一期 2003.
Application of high speed photography in vehicle crash test
Liu Tianming1, Liu Chunyan2
(1.China FAW Corporation Limited R&D Center,Changchun Jilin,130011;2.College Of Optical And Electronical lnformation Changchun University Of Science And Technology,Changchun Jilin,130012)
in this paper, the frontal collision is taken as an example to analyze the configuration of high speed camera and the selection of lens. Through the calculation method, the specific configuration parameters are suggested. In order to avoid the unnecessary loss during the experiment, the theoretical basis is provided.
impact test; high speed camera; lens; shooting speed; exposure time
刘天明(1982—),男,研究生学历,主要从事车辆被动安全研究。
刘春艳(1981—),女,讲师,研究生,主要从事检测与信号处理研究。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
大众摄影(2021年5期)2021-05-08
锦绣·上旬刊(2020年3期)2020-06-08
摄影之友(影像视觉)(2019年8期)2019-01-11
物理实验(2015年9期)2015-02-28
旅游纵览(2014年8期)2014-09-10
旅游纵览(2014年7期)2014-01-19
数码摄影(2009年8期)2009-10-14