船舶操纵非线性KT方程参数的辨识
2017-09-29 07:39郑文龙肖昌润
舰船科学技术 2017年9期
郑文龙,肖昌润
(海军工程大学 舰船工程系,湖北 武汉 430033)
船舶操纵非线性KT方程参数的辨识
郑文龙,肖昌润
(海军工程大学 舰船工程系,湖北 武汉 430033)
利用差分进化法对一阶和二阶非线性船舶操纵KT方程中的参数进行辨识,采用积分的方法处理试验数据以获得辨识所需的样本,将辨识结果与前人的方法进行比较,证明该方法能有效提高辨识精度。另外,辨识过程采用平行处理法代替分步辨识法,解决了辨识中的参数相消现象,同时也简化了辨识流程。
船舶操纵KT方程;系统辨识;平行处理法
0 引 言
船舶操纵响应模型在船舶操纵性研究中占有重要地位。自野本谦作通过Z形试验求取K,T的标准算法提出后[1],各国的船舶操纵性研究者都乐于用Z形操舵试验来确定K,T,以评价船舶的操纵性能。用系统辨识的方法来获取K,T简单、快速、准确。辛元欧等通过自然回归离散模型的最小二乘法建立了一阶和二阶KT非线性的连续模型[2];邹早建等利用分步辨识的方法对一阶和二阶非线性KT方程的参数进行了辨识[3];罗伟林结合船模自航模试验,应用岭回归方法,辨识了一类非线性的船舶操纵运动数学模型并且进行了操纵运动预报[4]。文献[2-3]在辨识时对原始数据采用差分的方法处理,误差较大。本文利用积分方法获取样本数据,以使辨识的准确性有所提高。
1 系统辨识
系统辨识[5]是在系统的输入和输出数据基础上,建立一个与所测系统等价的数学模型的理论和方法,包括确定模型结构和估计模型参数两部分。系统辨识方法应用于船舶操纵运动建模已经有近40年的历史。经典的辨识方法由于其本身的局限性已经逐渐被淘汰,智能算法因其对初值要求不高,不要求系统具有连续性等优势而兴起,差分进化法就是其中一种。
1.1 差分进化法简介
Rainer Storn和Kenneth Price于1995年共同提出了一种基于群体进化的算法[6],即差分进化法(Differential Evolution,DE),目的是求解切比雪夫多项式拟合问题。DE最大的特点就是可以记忆个体最优解并且在种群内共享信息,即利用群体内个体间的竞争与合作来求解优化问题,它基于实数进行编码,具有保留精英个体的思想,实质是一种贪婪遗传算法。整体结构上与其他进化算法类似,由变异、交叉和选择3个基本操作构成。标准差分进化法主要包括4个步骤[7]。
1)生成初始群体
在n维空间里随机生成满足约束条件的M个个体,实施措施如下:
2)变异操作
如果无局部优化问题,变异操作可写为
3)交叉操作
交叉操作是为了增加群体的多样性,具体操作如下:
其中,rand lij为[0,1]之间的随机小数;CR为交叉概率,CR∈[0,1]。
4)选择操作
反复执行步骤2~步骤4操作,直到达到最大迭代次数G,差分进化基本运算流程如图1所示。
1.2 参数相消现象及平行处理法
在辨识过程中,可能出现参数相消或者同时漂移现象[8],使辨识的精度大大降低。因为,模型中每个方程可能包含多个参数,例如同时辨识2个参数A和B,由于计算中的最优化要求,A和B可能同时偏离真值,使得目标函数达到最小。克服参数相消是获得较准确的辨识结果的基础,分步辨识法和平行处理法[9]都可以有效抑制参数相消。文献[3]运用了分步辨识的方法,但过程较为繁琐,本文采用平行处理法,简单而且有效。
Gelb(1974)年指出,系统所观测到的信息越多,辨识的结果就越准确。所以增加观测器无疑是一个好方法。如果选择2个观测器,它们互相独立,如:
观测器1
观测器2
由无偏估计的要求,有
不妨设
那么
平行处理法不但可以提高参数辨识的精度,还可以改善参数相消现象。因为在平行处理过程中,要辨识的参数个数并没有变化,但是所使用的数据却并不相同,不同的数据对参数的辨识均做出贡献,这样对相互抵消有所抑制。在处理时,既可以2组不同的观测数据,也可以用同一组观测数据在不同相位条件下的值来进行参数平行处理辨识。
2 操纵运动响应方程
船舶在广阔水域中航行,最关心的是航向问题,因此需要研究船舶的首向角对操舵的响应,这在自动操舵系统中尤为重要。一般的船舶首摇响应线性方程形式如下:
式(12)对分析航向稳定性很方便,也称为二阶线性KT方程。
1957年野本谦作用自动调节原理的方法,分析式(12)后提出了其简化形式,在操作不是很频繁的情况下,式(12)可近似用下式代替:
式(13)称为一阶KT方程,也称作野本方程。系数K,T具有鲜明的物理意义:K为回转性指数,能表征船舶回转性能的好坏;T为应舵指数,表示转首对操舵响应的快慢。式(13)在求解和分析问题时非常方便,所以得到了广泛的应用。本文的待辨识参数即为一阶和二阶非线性操纵响应方程中K,α,T(T1,T2,T3)。
3 操纵运动响应方程的辨识
为了进行参数辨识,首先需要获得样本数据。从式(12)和式(13)中可以看出,在进行辨识时,除了用到首向角和舵角的数据外,还要用到首向角速度及其一、二次微分形式还有转舵角速度,但是这些数据无法直接测得。文献[2-3]均采用差分的方法,本文提出采用积分的方法,2种方法均可以获得所需的样本,不同的是,差分过程要在辨识前进行,而积分过程则在辨识过程中进行。
3.1 差分处理
在对数据进行差分处理时,一般采用的方法是向前差分格式,但其精度要低于中心差分[10]格式,因此这里以中心差分格式为说明,各阶中心差分格式为:
文献[3]中提出的分步辨识方法如下:
1)由小舵角回转试验辨识K;
2)固定K,由大舵角回转试验辨识α;
3)固定K和α,由大舵角Z形试验辨识T(T1,T2,T3);
4)用中舵角Z形试验验证辨识结果的准确性。
3.2 积分处理
对于一阶非线性操纵响应方程,需进行如下计算:
对于二阶非线性操纵响应方程,计算如下:
3.3 不同方法辨识结果的比较
本文所涉及的船模试验包括一系列的回转试验和Z形试验,积分法在不同工况下的辨识结果均要好于差分法。图2是自航模试验中10°/10°Z形运动首向角变化曲线,以此为例来对比二者的辨识结果。
分别用文献[3]中的差分法和本文提出的积分法辨识一阶和二阶非线性响应方程中的参数,辨识结果如表1所示。
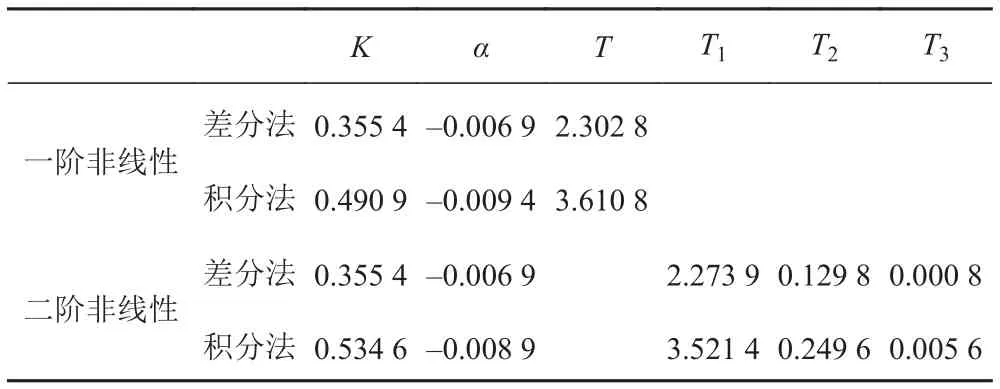
表 1 不同方法辨识结果Tab. 1 Identification results with different methods
为了验证辨识结果的准确性,将以上结果带到一阶线性操纵响应方程中,模拟船舶10°/10°Z形运动,模拟结果如图3所示。
从图中可以看出,利用积分的方法获得的样本数据辨识的结果要远好于通过差分方法得来的结果。
3.4 误差分析
利用差分方法计算r时已经产生了一定的误差,但是为了得到,等数据,又对差分后的结果进行差分,误差逐渐积累,从而导致辨识结果的不准确。图4用来比较分别用差分和积分的方法获得的r,,。
从图中可以看出,2种方法的差异在计算r时尚不明显;但当计算时已经差别很大;计算时差异更加明显。
4 结 语
本文改进了系统辨识过程中样本数据的获得途径,变差分为积分,从而避免了差分过程造成的误差。将辨识结果与差分处理的辨识结果以及野本手算法作比较,证明积分方法获得的样本数据更准确,能有效提高辨识精度。另外,在处理参数相消问题上采用平行处理法,可以一次辨识多个参数,简化了辨识流程。
[1]NOMOTO K. On the steering qualities of ships[J]. International Shipbuilding Progress, 1957, 4(35).
[ 2 ]辛元欧, 俞胜芬. 关于KT方程类的辨识方法研究-自回归模型的辨识[J]. 中国航海, 1983, 13(2): 28–43.XIN Yuan-ou, YU Sheng-fen. On the research of identification method forK-Ttype equations—identification of aitoregression modle[J]. Navigation of China, 1983, 13(2): 28–43.
[ 3 ]邹早建, 吴秀恒. 船舶操纵性非线性KT方程参数的辨识[J].武汉理工大学学报(交通科学与工程版), 1985, 3: 001.ZOU Zao-jian, WU Xiu-heng. The parameter identification of non-linerK-Tequations on ship maneuverability[J]. Journal of Wuhan University of Technology(Transportation Science &Engineering) , 1985, 3: 001.
[ 4 ]罗伟林, 邹早建. 基于岭回归方法的船舶操纵运动建模[J].船海工程, 2009, 38(6): 17–19.LUO Wei-lin, ZOU Zao-jian. Modeling of ship manoeuvring motion based on ridge regression[J]. Ship & Ocean Engineering, 2009, 38(6): 17–19.
[ 5 ]刘金琨, 沈晓蓉, 赵龙. 系统辨识理论及Matlab仿真[M]. 电子工业出版社, 2013.
[ 6 ]STORN R, PRICE K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11(4):341–359.
[ 7 ]杨启文, 蔡亮, 薛云灿. 差分进化算法综述[J]. 模式识别与人工智能, 2008, 21(4): 506–513.YANG Qi-wen, CAI Liang, XUE Yun-can. A survey of differential evolution algorithms[J]. PR&AR, 2008, 21(4):506–513.
[ 8 ]吴秀恒, 刘祖源, 施生达. 船舶操纵性[M]. 北京: 国防工业出版社, 2005.
[ 9 ]STOLFO S J. Parallel processing method: U. S. Patent 4, 843,540[P]. 1989-6-27.
[10]李常青, 楼梦麟. 中心-偏心差分法[J]. 同济大学学报(自然科学版), 2011, 02: 179–186.LI Chang-qing, LOU Meng-lin. Central-eccentric difference method[J]. Journal of Tongji University(Natural Science),2011, 02: 179–186.
The parameter identification ofKTequations on ship maneuverability
ZHENG Wen-long, XIAO Chang-run
(Department of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Identified the parameters of the first and second order ship maneuvering nolinear response equation. Itegrated the test datas to get sample datas. It has been confirmed that this method can improve the accuracy of identification compared to other methods. Using the parallel processing method, instead of step-by-step identification to reduce parameters offset. This method can also simplify identification flow.
KTequations on ship maneuverability;system identification;the parallel processing method
U661.3
A
1672 – 7649(2017)09 – 0129 – 04
10.3404/j.issn.1672 – 7649.2017.09.025
2016 – 08 – 12;
2016 – 09 – 12
郑文龙(1991 – ),男,硕士研究生,研究方向为舰船流体力学。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
湘潭大学自然科学学报(2022年2期)2022-07-28
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
中等数学(2021年9期)2021-11-22
小哥白尼(神奇星球)(2021年4期)2021-07-22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数学学习与研究(2017年20期)2018-01-02
计算机应用(2016年10期)2017-05-12
中学数学杂志(初中版)(2016年3期)2016-06-24