大载荷植保无人直升机喷雾气液两相流动数值模拟
2017-10-11 01:33王军锋徐文彬闻建龙王晓英罗博韬
农业机械学报 2017年9期
王军锋 徐文彬 闻建龙 王晓英 罗博韬
(江苏大学能源与动力工程学院, 镇江 212013)
大载荷植保无人直升机喷雾气液两相流动数值模拟
王军锋 徐文彬 闻建龙 王晓英 罗博韬
(江苏大学能源与动力工程学院, 镇江 212013)
为研究大载荷植保无人直升机喷雾流场特性,基于FR-200型大载荷植保无人直升机喷洒系统,建立FR-200型大载荷植保无人直升机无植物冠层三维雾滴沉降仿真模拟平台,利用Fluent软件的SSTk-ω湍流模型和DPM离散相模型对无人直升机喷雾沉降过程进行了仿真模拟,分别研究了飞行速度、喷杆相对位置、喷施角度对喷雾流场的影响,并进行户外试验验证。试验结果表明,下洗流场垂直方向速度(Z向)呈不对称分布,旋翼x/R为0.8处垂直方向速度(Z向)最大;仿真模拟的雾滴沉积总量与户外试验的雾滴沉积密度基本一致,线性决定系数R2为0.999 6,无人直升机前飞速度与雾滴群抗飘移系数及沉积量呈线性关系,前飞速度3 m/s时,靶标上雾滴总沉积密度为4.208 μL/cm2,前飞速度5 m/s时,靶标上雾滴总沉积密度为1.766 μL/cm2;随着采样面的升高,雾滴群抗飘移性能增强;位于喷杆不同位置处喷头的抗飘移性能不同,主要表现在位于喷杆两端的喷头1和9受到旋翼尾涡的影响,雾滴群抗飘移性能变差,机身正下方的喷头5由于机身阻挡作用,造成雾滴群分散性增加,雾滴因垂直方向动能衰减而难以到达采样面;喷施角度越小,雾滴群总体抗飘移性能越好。
无人直升机; 大载荷; 植保; 数值模拟
引言
航空植保能够有效地完成病虫害防治,同时植保作业一般不受作物生长态势、地理位置的限制[1-2]。植保无人机低空施药具有作业效率高、防治效果好、农药利用率高、一次性作业面积广等优点,喷洒作业采用人药分离模式,从根本上解决植保作业过程中农药对作业人员危害的难题[3]。但是无人直升机旋翼产生的下洗流场为非定常流场,喷洒作业时雾滴的沉积和飘移受到下洗流场的影响较大,特别是无人直升机作业过程中受到旋翼尾涡的影响,雾滴在旋翼尾涡的作用下产生严重的农药飘移现象[4-10]。美国是农业航空最发达的国家,开发了多种预测雾滴沉积和飘移的计算机模型,应用最广泛的是FSCBG模型和AGDISP模型,其中AGDISP模型是基于拉格朗日方法求解翼尖涡,同时考虑当地风速、螺旋桨和重力等因素综合影响,可以很好地模拟真实环境下航空喷洒作业雾滴沉积和飘移情况[11-15]。RYAN等[16]利用计算流体力学软件ANSYS CFX,建立了AT-802固定翼飞机喷雾多相流数值仿真平台,研究了不同侧风对飞机尾涡结构以及雾滴运动轨迹的影响,研究表明随着侧向风速的增加,飞机尾涡变得复杂,雾滴的空间分布不均匀性增加。目前,国内一些学者也开始了无人机雾滴沉积和飘移的研究,薛新宇团队[17]对N-3型植保无人机的作业过程进行了模拟研究,结果表明小型植保无人机农药喷洒飘移现象只发生在侧风风向的下方,农田作业时需要预留8~10 m的缓冲区域,以免药液飘移造成危害。陈盛德等[18]利用HY-B-10L型单旋翼电动无人机通过改变不同飞行参数研究了不同喷雾参数对水稻冠层的雾滴沉积分布的影响,研究发现靶标区雾滴沉积量随着高度的增加而减小,作业高度为1.92 m时雾滴沉积均匀性最佳,且雾滴飘移量最少。综上所述国内外研究成果,国内学者的研究主要集中在小型植保无人机,国外学者研究主要集中在有人驾驶固定翼飞机方面,但是关于载量30 kg以上的大载荷植保无人直升机喷雾多相流动的研究未见报道。
鉴于此,为了研究大载荷植保无人直升机喷雾流场的特性及喷雾场中雾滴的沉降规律,本文基于飞瑞航空科技(江苏)有限公司研发的FR-200型大载荷植保无人直升机,建立大载荷植保无人直升机无植物冠层三维雾滴沉降仿真模拟平台,并运用数值仿真软件(Fluent)对其气液两相流场进行模拟分析。
1 物理模型
根据FR-200型无人直升机实际测量尺寸和简化建模的需要,使用CATIA软件建立FR-200型无人直升机三维物理模型,无人直升机基本结构如图1所示。机身下方安装有9个VP110-015型扇形喷头(编号1~9),喷头安装间距为50 cm,当雾化压力为0.3 MPa时,单个喷头的流量为480 mL/min(质量流量0.008 kg/s),距离喷头下方50 cm处雾滴索泰尔平均直径为81 μm,测试仪器采用济南维纳仪器有限公司生产的winner318 A型激光粒度分析仪;桨叶具体参数如下:桨叶类型为NACA0012,桨叶半径R为2.1 m,弦长0.2 m,桨距10°,负扭转0°,桨叶2片,转速为850 r/min,FR-200型无人直升机最大载荷可达80 kg,单架次起降作业面积可达2 hm2。
方向定义:如图1所示坐标系,定义无人机行进方向为X负方向,上升方向为Z正方向,机身左侧至右侧为Y正方向。

图1 FR-200型无人直升机基本结构Fig.1 Fundamental structure of FR-200 UAV1~9.喷头 10.喷杆 11.机身 12.机翼
2 数值模拟
2.1 网格化处理
在ICEM中,对机身和计算域进行网格化处理。选择如图2所示长度为60 m、宽为60 m、高度为30 m的长方形计算域,其中旋翼距离底面(BCGH面)3 m,设定旋翼中心轴为坐标原点。采用贴体坐标法生成无人机的机身曲面和计算域的网格,不同网格区域通过设置interface面连接,网格数为675万[19-20],模拟计算区域如图2所示。
机身及机翼处网格分别如图3a和3b所示。

图2 模拟计算区域Fig.2 Simulation area

图3 网格化处理结果Fig.3 Grid processing results
2.2 数值模拟方法
2.2.1边界条件设定
(1)速度进口边界条件
设定无人直升机前飞速度边界为速度进口边界条件(ABCD面),速度设定为3~6 m/s,方向由前向后,见图2中X向。
(2)压力出口边界条件
设定除速度进口边界条件以外的出口边界均为压力出口边界。
(3)壁面边界条件
无人直升机机身及旋翼表面设置为无滑移壁面边界条件。
2.2.2模型选择
喷雾两相流场基于N-S方程中的质量、动量、能量守恒方程,选择湍流模型中SSTk-ω湍流模型,其数学通用式为

(1)
式中u、v、w——x、y、z方向上的速度矢量分量ψ——通用变量ζ——广义扩散系数S——广义源项ρ——流体密度
选取9个扇形喷头的扁平喷口所在位置为雾滴释放口,设定雾化模型为平板扇形雾化喷头模型,其各项参数根据实测结果以及理论计算得出,喷口位置及扇叶向量根据实际工况确定,喷雾半角为55°,喷嘴等效宽度为0.1 mm,扩散角度为6°。
2.2.3模拟研究
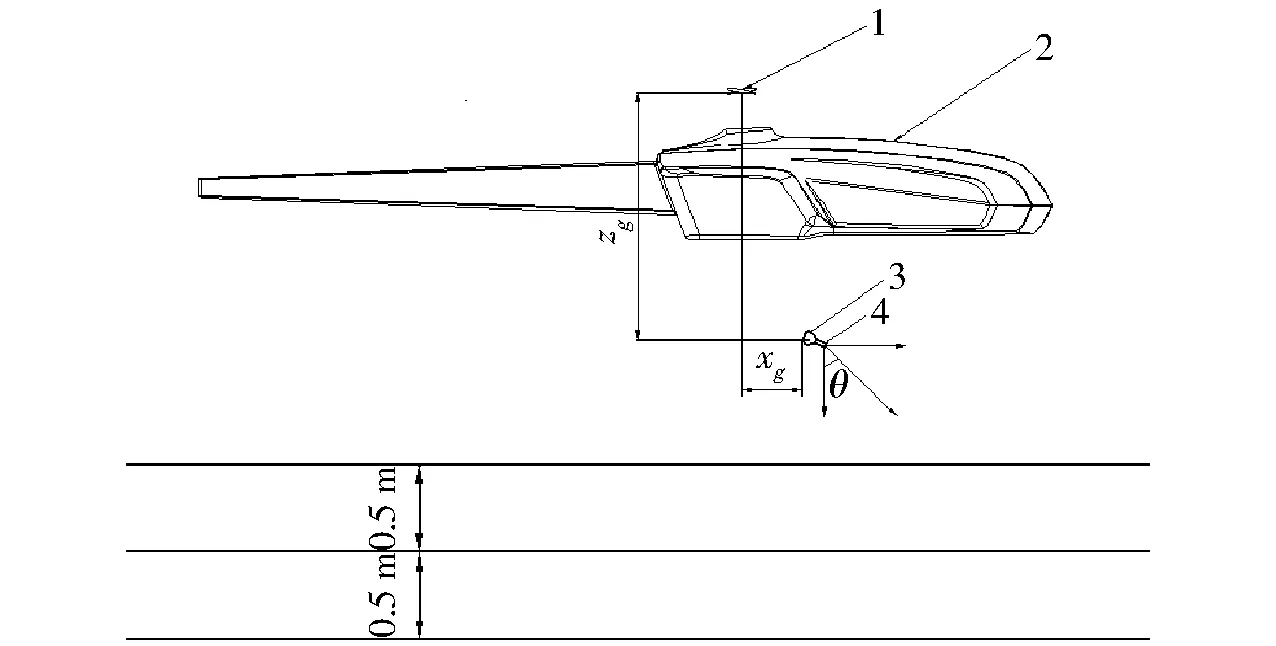
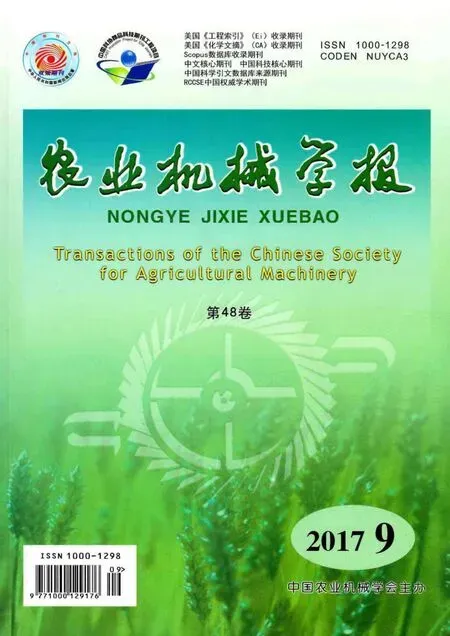
图4 喷杆相对位置及喷施角度示意图Fig.4 Sketch of relative position of spray boom and spraying angle1.机翼 2.机身 3.喷杆 4.喷头
FR-200型植保无人直升机田间植保作业过程中旋翼与农作物的垂直距离一般为2~7 m,因此为了模拟雾滴在农作物上的沉积分布情况,选取如图4所示0、0.5、1.0 m平面为雾滴采样面,对所模拟工况进行雾滴采样,采样步长为0.01 s,采样步数10步。本文通过统计雾滴到达采样面的质量,定量评估雾滴沉积和飘移特性。雾滴到达作物冠层实现雾滴沉积,故穿过采样面的粒子记为雾滴沉积。雾滴沉积质量md计算式为
(2)
式中N——通过采样面沉积的粒子包个数ρs——液滴的密度,kgni——第i个粒子包中粒子个数ri——第i个粒子包中粒子半径,m
雾滴群抗飘移系数η定义为

(3)
式中M——喷头在采样时间段内释放的液滴质量,kg
在CFD中定义雾滴收集平面,采用CFD中DPM模型的DEFINE_DPM _OUTPUT宏统计流过目标平面的所有粒子包以及粒子包的信息。所收集粒子包的信息包括x、y、z坐标,粒子包内的粒子个数,直径等。
(1)旋翼与喷头水平相对位置xg对喷雾流场的影响
固定旋翼转速,旋翼与喷杆垂直距离zg=1 m,喷施角度θ=0°,对前飞速度v为3、4、5、6 m/s,水平距离xg为0、0.25、0.50 m的工况进行模拟。
(2)旋翼与喷头垂直相对位置zg对喷雾流场的影响
固定旋翼转速,水平距离xg=0 m,喷施角度θ=0°,对前飞速度v为3、4、5、6 m/s,垂直距离zg为1.00、1.25、1.50 m的工况进行模拟。
(3)喷施角度θ对喷雾流场的影响
固定旋翼转速,水平距离xg=0 m,垂直距离zg=1 m,对前飞速度v为3、4、5、6 m/s,喷施角度θ为0°、15°、30°的工况进行模拟。
3 模拟结果与分析
3.1 下洗气流分布情况
选取计算区域内y=0 m剖面为观察面,图5给出了y=0 m观察面上旋翼气相流场的垂直方向速度(速度显示范围为-14~0 m/s,负值代表速度方向向下)。观察旋翼下洗气流可知:在旋翼正下方y=0 m时,由于受到机身阻挡的作用,机身下方的速度较为紊乱,y=0 m处喷头5的垂直方向的速度方向朝上,对于雾滴的沉降有阻碍作用。
图6表示喷杆固定在旋翼正下方zg=1 m,xg=0 m时,喷杆位置处垂直方向速度分布,可知Y轴左右两侧的速度呈现不对称分布,由于机身阻挡作用,y=0 m处速度最大值为4 m/s(方向朝上)。在旋翼x/R=0.8位置处下洗流场垂直方向速度最大,最大值为-12 m/s,在y为-2.1~2.1 m范围内随着y值的增大,呈现先减小后增大再减小再增大的趋势。

图5 y=0 m处气相流场垂直方向分速度Fig.5 Vertical speed of gas phase flow field at y=0 m

图6 喷杆位置处垂直方向速度分布Fig.6 Vertical speed distribution of spray boom
统计3个采样面上雾滴沉积情况,根据式(3)得到雾滴群抗飘移系数η,利用Origin得出数据散点趋势线,如图7所示。由图7可知,无人直升机前飞速度与抗飘移系数呈线性关系,当前飞速度v为3、4、5、6 m/s时,h=1.0 m采样面上抗飘移系数依次为94.2%、87.5%、76.5%、75.0%,表明随着前飞速度的增大,雾滴群抗飘移性减弱。当前飞速度一定时, 随着采样面的升高,雾滴群抗飘移性能增强。

图7 抗飘移系数与前飞速度之间的关系曲线Fig.7 Relationship between droplets deposition and speed of UAV
3.2水平相对位置xg对雾滴沉积分布的影响
对几种工况进行采样,采样结束后将采样面沿水平方向分为17个区间,区间正值代表雾滴位于喷口的顺自然风方向,负值代表位于其逆自然风方向。
图8表示喷杆垂直距离zg=1 m,喷施角度θ=0°,水平距离xg为0、0.25、0.50 m时,采样面h=0 m上雾滴分布情况。当前飞速度v=3 m/s,xg=0 m时,雾滴主要沉积在0.6~1.0 m范围内,雾滴沉积质量最大值为1.7 g,当xg=0.25 m时,雾滴主要沉积在0.4~0.8 m范围内,雾滴最大沉积量为1.5 g;而当前飞速度v=5 m/s,xg=0 m时,雾滴主要沉积在1.0~1.6 m区间范围内,雾滴最大沉积量为1.5 g,当xg=0.25 m时,雾滴主要沉积在0.6~1.4 m范围内,雾滴最大沉积量为1.0 g,对比可知无人机飞行速度v增加,雾滴主要沉积区间范围扩大,区间内雾滴沉积质量最大值减小,同时喷杆位置前移造成雾滴沉积总量减小。
图8 不同水平距离时采样面的雾滴沉积分布Fig.8 Droplets deposition distributions under different horizontal distances

图9 不同水平距离时雾滴群抗飘移系数Fig.9 Droplet swarm anti-drift coefficient under different horizontal distances
无人直升机喷洒作业时,喷雾受到下洗气流的影响,下洗气流分布的不均匀性造成在喷杆不同位置处喷头沉积量有较大的区别。由图9可知,喷杆垂直距离zg=1 m,喷施角度θ=0°,水平距离xg=0.5 m,前飞速度v=3 m/s,喷头1和9雾滴群抗飘移系数分别为40%和25%,数值远小于其他喷头的抗飘移系数,主要原因是喷头1和9位于旋翼尾涡附近,在旋翼尾涡的作用下雾滴被卷吸并出现上扬现象,造成沉积到采样面需要更长的时间从而减少了雾滴的沉积量,雾滴群整体抗飘移性能减弱。位于喷杆不同水平位置处的喷头抗飘移系数也存在一定的差别。

图10 不同垂直距离时采样面的雾滴沉积分布Fig.10 Droplets deposition distributions under different vertical distances
3.3垂直相对位置zg对雾滴沉积分布的影响
对几种工况进行采样,图10表示喷杆水平距离xg=0 m,喷施角度θ=0°,垂直距离zg为1.00、1.25、1.50 m时,h=0 m采样面上雾滴分布情况。由图10可知,雾滴分布的峰值区间沿逆风方向向前移动,整个采样面上雾滴的分散程度随着垂直距离的增大而减小。前飞速度v=3 m/s时,雾滴沉积分布基本上一致,不同垂直高度zg雾滴的沉积量在0.2~0.6 m区间内上升,在0.6 m以后的区间沉积量逐渐下降。前飞速度v=5 m/s时,雾滴的沉积量主要集中在0.8~1.6 m范围内,表明前飞速度v增加了雾滴水平方向上的初始动能,使得雾滴沉积到更远的区域,造成一定的飘移,同时垂直距离zg为1.00、1.25、1.50 m时,雾滴最大沉积量分别为1.5、1.4、1.3 g,雾滴沉积总量分别为6.1、6.3、6.5 g,表明随着喷杆垂直距离的增加,雾滴沉积分布均匀性增加。
图11表示在h=0 m采样面,喷杆水平距离xg=0 m,喷施角度θ=0°,垂直距离zg为1.00、1.25、1.50 m时雾滴群抗飘移系数。前飞速度v=5 m/s,垂直距离zg为1.00、1.25、1.50 m时,喷头1和9雾滴群抗飘移系数分别为61.7%和44.5%、72.9%和59.8%、84.2%和65.1%,因此随着垂直距离zg的增加,喷头1和9雾滴群抗飘移系数增加,抗飘移性能增强,主要原因是喷杆垂直距离增加,旋翼尾迹对喷头1和9的影响减小,旋翼尾涡对雾滴的卷吸作用降低,使得雾滴的沉积量增加。

图11 不同垂直距离时雾滴群抗飘移系数Fig.11 Droplet swarm anti-drift coefficient under different vertical distances

图12 不同喷施角度时雾滴群抗飘移系数Fig.12 Droplet swarm anti-drift coefficient at different spray angles
3.4喷施角度θ对雾滴沉积分布的影响
图12表示喷杆水平距离xg=0 m,垂直距离zg=1 m时,喷施角度θ为0°、15°、30°,h=0 m采样面上雾滴群抗飘移系数。前飞速度v=5 m/s时,喷施角度θ为0°、15°、30°,喷头5抗飘移系数分别为96.2%、70.6%和63.5%,不同喷施角度下机身正下方喷头5抗飘移系数变化较大,主要是旋翼产生的下洗气流受到机身的阻挡作用,机身正下方流场分布紊乱,垂直方向速度朝向Z轴正方向,使得雾滴群分散性增加,同时由于空气对雾滴的运动存在阻力,雾滴向下运动直至到达采样面的过程伴随着垂直方向动能的衰减,由于机身正下方雾滴群分散性增加,其垂直方向动能衰减难以到达采样面,从而造成雾滴群抗飘移系数减小,抗飘移性能变差。喷施角度越大,雾滴群总体抗飘移系数越小,抗飘移性能越差,主要原因是喷施角度越大,雾滴垂直方向初始速度越小,造成雾滴垂直方向初始动能越小,到达采样面需要更长的时间。
4 试验
4.1 无人直升机喷雾沉积试验
为了检验无人直升机喷雾沉积特性,对FR-200型无人直升机进行了雾滴沉积试验,喷杆水平距离xg=0 m,垂直距离zg=1 m,喷施角度θ=0°,户外试验在江苏省镇江航空航天产业园进行,试验主要研究无人直升机不同飞行速度下雾滴的沉积分布规律,主要围绕速度参数进行试验设计。飞行速度为3、4、5、6 m/s,飞行高度为3 m,试验区域长12 m,区域内25张水敏纸0.5 m水平间隔安放在收集杆上收集雾滴,收集杆高度为1 m,水敏纸排布方式如图13a所示,重复试验3次,图13b为喷洒试验现场。

图13 喷洒试验Fig.13 Spray test
每次试验完成后,将收集的水敏纸进行扫描,并用Deposition Scan软件进行分析,得到不同作业参数下雾滴的密度、沉积量及覆盖率。
为了描述试验中各采集点之间的雾滴沉积均匀分布性,本文采用变异系数来衡量各个采集点之间的雾滴沉积均匀性,变异系数表达式为

(4)
其中
(5)

n——试验采集点个数
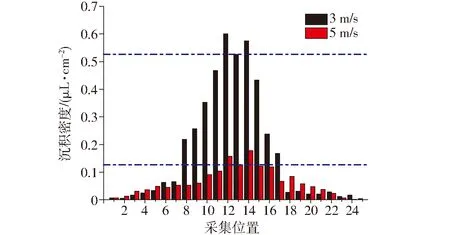
图14 雾滴沉积分布Fig.14 Droplets deposition distribution
4.2 试验结果分析
无人直升机喷雾试验结果如图14所示,随着前飞速度的增加,靶标区雾滴总沉积密度逐渐减小,分别为4.208、3.124、1.766、1.255 μL/cm2,平均沉积分布为0.168、0.093、0.071、0.062 μL/cm2,平均雾滴数为151、126、92、53个/cm2,且靶标中心位置处靶标13(对应喷头5)小于靶标12(对应喷头4)和靶标14(对应喷头6)雾滴沉积密度。对仿真模拟雾滴沉积总量及实测雾滴沉积密度进行线性拟合分析,结果如图15所示,仿真模拟雾滴沉积总量与实测雾滴沉积密度之间呈线性关系,拟合线性方程y=-10.30+2.144x,其决定系数R2=0.999 6,说明仿真模拟雾滴沉积总量与实测雾滴沉积密度基本一致,基本符合农田现场测量情况。
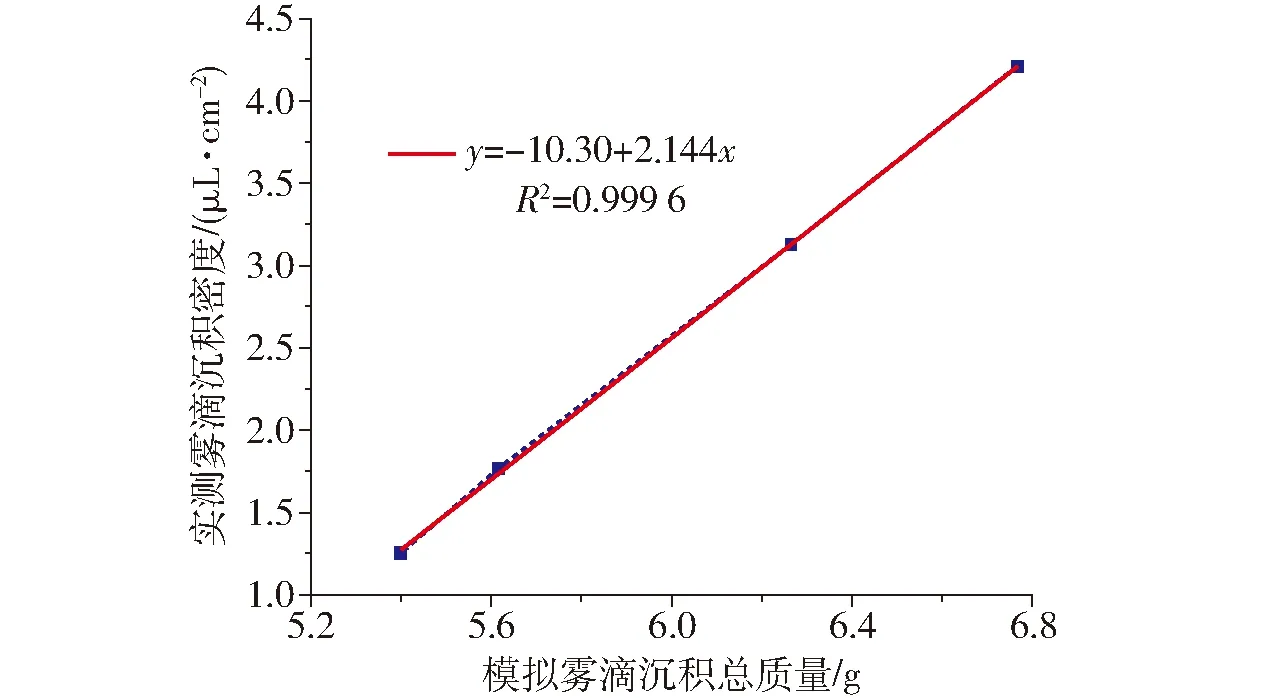
图15 数值模拟值与田间测量值线性回归分析Fig.15 Linear regression analysis of simulated and measured values
5 结论
(1)旋翼左右两侧的速度呈现不对称分布,旋翼x/R=0.8位置处下洗流场垂直方向速度最大,可达-12 m/s。
(2)通过不同飞行速度下沉积量模拟值与试验值对比可以看出,无人直升机前飞速度与抗飘移系数及沉积量呈直线关系,前飞速度越大,雾滴群的抗飘移性越差,采样面上雾滴沉积量越小;随着采样面高度的增加,雾滴群抗飘移性能增强。
(3)位于喷杆不同位置处喷头的抗飘移性能不同,主要表现在位于喷杆两端的喷头1和9受到旋翼尾涡的影响,雾滴群抗飘移性能变差,机身正下方的喷头5由于机身阻挡作用,造成雾滴群分散性增加,雾滴因垂直方向动能衰减而难以到达采样面,雾滴群抗飘移系数减小。
(4)喷施角度越大,雾滴垂直方向初始速度越小,造成雾滴垂直方向初始动能越小,到达采样面需要更长的时间,抗飘移性能越差。
(5)无论是飞行速度、喷杆相对位置还是喷施角度,对大载荷无人直升机喷雾雾滴沉积和飘移都产生了影响,因此无人直升机的下洗流场是影响无人直升机航空植保作业中雾滴沉积和飘移的重要因素。在植保无人直升机设计中,需要充分考虑飞行参数、喷杆相对位置、喷施角度的设计,充分利用无人直升机的下洗气流增加雾滴的沉积量,综合各个因素将雾滴的飘移量降到最低。
1 薛新宇,梁建,傅锡敏. 我国航空植保技术的发展前景[J].中国农机化,2008(5): 72-74. XUE Xinyu, LIANG Jian, FU Ximin. Prospect of aviation plant protection in China[J]. Chinese Agricultural Mechanization, 2008(5): 72-74. (in Chinese)
2 薛新宇,屠康,兰玉彬,等.无人机高浓度施药对水稻品质的影响[J/OL].农业机械学报,2013,44(12):94-98,79.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131216&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.12.016. XUE Xinyu, TU Kang, LAN Yubin, et al. Effects of pesticides aerial applications on rice quality[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(12):94-98,79.(in Chinese)
3 张东彦,兰玉彬,陈立平,等. 中国农业航空施药技术研究进展与展望[J/OL]. 农业机械学报,2014,45(10):53-59. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20141009&flag=1. DOI:10.6041/j.issn.1000-1298.2014.10.009. ZHANG Dongyan,LAN Yubin,CHEN Liping,et al. Current status and future trends of agricultural aerial spraying technology in China[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):53-59. (in Chinese)
4 FRITZ B K. Role of atmospheric stability in drift and deposition of aerially applied sprays-preliminary results[C]∥2004 ASAE Annual Meeting. ASAE Paper 041031,2004.
5 KIRK I W, FRITZ B K. Aerial methods for increasing spray deposits on wheat heads[C]∥2004 ASAE Annual Meeting. ASAE Paper 041029,2004.
6 秦维彩,薛新宇,周立新,等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报,2014,30(5):50-56. QIN Weicai, XUE Xinyu, ZHOU Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J]. Transactions of the CSAE, 2014, 30(5): 50-56. (in Chinese)
7 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10. ZHOU Zhiyan, ZANG Ying, LUO Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the CSAE, 2013, 29(24): 1-10. (in Chinese)
8 HUANG Y B, THOMSON S J, HOFFMANN W C, et al. Development and prospect of unmanned aerial vehicle technologies for agricultural production management[J]. International Journal of Agricultural & Biological Engineering, 2013, 6(3):1-10.
9 王昌陵, 何雄奎, 王潇楠,等. 基于空间质量平衡法的植保无人机施药雾滴沉积分布特性测试[J]. 农业工程学报, 2016, 32(24):89-97. WANG Changling, HE Xiongkui, WANG Xiaonan, et al. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of spatial quality balance[J]. Transactions of the CSAE, 2016, 32(24): 89-97.(in Chinese)
10 秦维彩, 薛新宇, 张宋超,等. 基于响应面法的P20型多旋翼无人机施药参数优化与试验[J]. 江苏大学学报:自然科学版, 2016, 37(5):548-555. QIN Weicai, XUE Xinyu, ZHANG Songchao, et al. Optimization and test of spraying parameters for P20 multi-rotor electric unmanned aerial vehicle based on response surface method[J].Journal of Jiangsu University: Natural Science Edition, 2016,37(5):548-555. (in Chinese)
11 薛新宇,兰玉彬. 美国农业航空技术现状和发展趋势分析[J/OL].农业机械学报,2013,44(5):194-201.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130534&flag=1.DOI: 10.60 41/j.issn.1000-1298.2013.05.034. XUE Xinyu, LAN Yubin. Agricultural aviation applications in USA[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(5):194-201. (in Chinese)
12 THISTLE H W, TESKE M E, DROPPO J G, et al. AGDISP as a source term in far field atmospheric transport modeling and near field geometric assumptions[C]∥2005 ASAE Annual Meeting. ASAE Paper 051149,2005.
13 HEWITT A J, MABER J, PRAAT J P. Drift management using a GIS system[C]∥Proceedings of the World Congress of Computer in Agriculture and Natural Resources, 2002: 290-296.
14 TESKE M E, THISTLE H W. Aerial application model extension into the far field[J]. Biosystems Engineering, 2004, 89(1):29-36.
15 ZHANG B, TANG Q, CHEN L P, et al. Numerical simulation of wake vortices of crop spraying aircraft close to the ground[J]. Biosystems Engineering, 2016, 145:52-64.
16 RYAN S D, GERBER A G, HOLLOWAY A G L. A computational study on spray dispersal in the wake of an aircraft[J]. Transactions of the ASABE, 2013, 56(3): 847-868.
17 张宋超,薛新宇,秦维彩,等. N-3型农用无人直升机航空施药飘移模拟与试验[J]. 农业工程学报,2015,31(3):87-93. ZHANG Songchao, XUE Xinyu, QIN Weicai, et al. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J]. Transactions of the CSAE,2015, 31(3): 87-93. (in Chinese)
18 陈盛德,兰玉彬,李继宇,等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J].农业工程学报,2016,32(17):40-46. CHEN Shengde, LAN Yubin, LI Jiyu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the CSAE, 2016, 32(17): 40-46. (in Chinese)
19 任玉新,陈海昕. 计算流体力学基础[M]. 北京:清华大学出版社,2006.
20 王福军. 计算流体动力学分析——CFD 软件原理与应用[M].北京:清华大学出版社,2004.
NumericalSimulationonGas-liquidPhaseFlowofLarge-scalePlantProtectionUnmannedAerialVehicleSpraying
WANG Junfeng XU Wenbin WEN Jianlong WANG Xiaoying LUO Botao
(SchoolofEnergyandPowerEngineering,JiangsuUniversity,Zhenjiang212013,China)
In order to study the spray flow filed characteristic of large-scale plant protection unmanned aerial vehicle (UAV), based on the spray system of FR-200 large-scale plant protection UAV, the simulation platform of depositing spray droplets without plant canopy was established. The SSTk-ωturbulence model and the DPM discrete phase model were adopted to simulate the deposition process of UAV spray droplets. By means of numerical Fluent simulation software, the flight speed, spray boom relative position and spraying angle impact on the spray flow field were studied,field test was done to verify the results of simulation. The vertical velocity distribution of FR-200 UAV downwash flow field was unsymmetrical. The UAV speed had linear relationships with both the droplet swarm anti-drift coefficient and deposition, the total amount of the target droplets deposition density were 4.208 μL/cm2when flying speed was 3 m/s, the total amount of the target droplets deposition density were 1.766 μL/cm2when flying speed was 5 m/s. The anti-drift coefficient was 87.5%, 93.0% and 96.4% at sampling plane height of 0 m, 0.5 m and 1.0 m when flying speed was 4 m/s, respectively. With the increase of sample surface height, the anti-drift performance of droplets was promoted. The drift phenomenon of nozzles was serious which was installed on both sides of the spray boom. The nozzles were affected by the trailing vortex which caused the droplets drift. The rotor downwash flow increased spray droplets initial kinetic energy, the spray droplets acceleration was caused by gravity and downwash flow. The dispersion of number 5 nozzle spray droplets was increased due to the blocking effect, and it was hard to reach the sample surface due to the vertical kinetic energy attenuation of droplets. The smaller the spraying angle was, the stronger the droplets total anti-drift performance became.
unmanned aerial vehicle; large-scale; plant protection; numerical simulation
S252
A
1000-1298(2017)09-0062-08
10.6041/j.issn.1000-1298.2017.09.008
2016-11-20
2017-03-26
江苏省农业科技自主创新资金项目(CX(15)1038)
王军锋(1975—),男,教授,博士生导师,主要从事荷电多相流研究,E-mail: wangjunfeng@ujs.edu.cn
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
口腔颌面修复学杂志(2022年2期)2022-04-27
农业机械学报(2022年2期)2022-03-14
北京航空航天大学学报(2021年9期)2021-11-02
实用口腔医学杂志(2021年5期)2021-10-19
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
农业知识(2018年45期)2018-01-17
北京航空航天大学学报(2016年8期)2016-11-16