三自由度气动柔性驱动器结构功能与形变特性研究
2017-10-11 01:35赵云伟耿德旭刘晓敏刘洪波郑永永
农业机械学报 2017年9期
赵云伟 耿德旭 刘晓敏 刘洪波 郑永永
(1.北华大学工程训练中心, 吉林 132021; 2.北华大学机械工程学院, 吉林 132021)
三自由度气动柔性驱动器结构功能与形变特性研究
赵云伟1耿德旭1刘晓敏1刘洪波1郑永永2
(1.北华大学工程训练中心, 吉林 132021; 2.北华大学机械工程学院, 吉林 132021)
设计了一种采用伸长型气动人工肌肉的三自由度柔性驱动器,该驱动器的驱动装置与本体复合一体,主要由3根对称分布的人工肌肉并联组成。根据力和力矩分析,考虑了驱动器伸长量、弯曲方向和弯曲角度的综合影响,建立了驱动器伸长量、弯曲方向和弯曲角度的非线性理论模型。通过试验对理论模型进行了验证,获得了柔性驱动器在不同通气方式下的形变性能。结果表明:该柔性驱动器弯曲时近似圆弧状,具有较高灵活性,能够实现轴向伸长和空间内任意方向弯曲,可作为执行部件应用于农业机器人和果蔬采摘机械手等仿生机械上。
人工肌肉; 气动柔性驱动器; 空间弯曲; 形变特性
引言
随着现代农业的迅速发展和劳动力生产成本的日益增加,智能农业机器人被广泛应用以提高生产率,降低人工蔬果采摘成本[1-3]。农作物果蔬形状和尺寸各异,需求适应性好的采摘机械手。柔性关节构成的机械手具有较好的灵活性,适于作为农业机器人的果蔬采摘执行器。近年来国内外学者在柔性驱动器的驱动材料、结构优化和柔性控制实现等方面进行了大量研究。柔性驱动器根据驱动方式可以分为电动机驱动、功能材料驱动和流体驱动等[4-7]。气体驱动是流体驱动器的一种常见方式,具有部件少、质量低、成本低、工作温度低和柔顺性高等特点[8]。典型的气动柔性驱动器为McKibben型人工肌肉[9-10],主要利用橡胶气囊径向膨胀产生拉力进行工作。许多学者都对其控制方式进行了研究,并将人工肌肉组成关节在机械手上进行应用[11-12]。文献[13-14]应用气动人工肌肉研制了并联结构三自由度驱动器,并对该驱动器的动力学模型和非线性控制进行了研究。浙江工业大学机电研究所采用3个气动柔性驱动器研制了一种新型气动柔性球关节[15],通过向3个柔性驱动器内输入不同的气压实现其旋转运动。20世纪80年代日本Toshiba公司采用内部附有尼龙螺旋纤维线的橡胶管研制了一种气动柔性微型驱动器[16],该驱动器具有多个自由度,内部为3个对等分布的气室。SUZUMORI等[17-18]分析了该驱动器静力学特性和动力学特性,并研制了未嵌入尼龙纤维的柔性驱动器,将其应用于多指机械手。于莲芝等[19]采用三自由度空气压橡胶驱动器研制成具有柔性移动机构的微小机器人内窥镜诊疗系统。
传统柔性驱动器通常是关节本体和驱动装置相对独立,运动和驱动柔性多数依赖于控制技术,体积、刚度和惯性较大,灵活性和适应性差,目前已有的气动驱动器尚不能完全满足仿生及特种机器人等领域的特殊需要。为了解决现阶段柔性驱动器存在的问题,本文采用自主研发的轴向膨胀型人工肌肉设计一种三肌肉气动复合弹性体结构的柔性驱动器。
1 柔性驱动器结构与功能
设计的气动柔性驱动器由3个对称均布互成120°的气动人工肌肉和弹性骨架并联组成。人工肌肉为气囊与端盖之间形成的封闭腔体,外部为套装的薄片状约束环,肌肉之间添加弹性骨架,如图1所示。弹性骨架起到支撑和连接作用,可提高柔性驱动器刚度和弹性恢复,保证驱动器运动功能的实现。

图1 气动柔性驱动器Fig.1 Flexible pneumatic actuator1.气囊 2.约束环 3.上端盖 4.弹性骨架 5.下端盖 6.气动接头
驱动器制作工艺较为复杂,气囊通常采用乳胶管和硅胶管,弹性骨架采用弹簧等弹性元件,约束环和端盖采用ABS塑料3D打印而成。在制作时,首先将通气软管与下接头进行压装,然后联同上接头采用钢丝扎紧方式封装气囊,为保证气密性,预先套装约束环进行通气试验;然后依次将气囊与弹性骨架(圆柱螺旋弹簧)与下端盖连接,端盖设有匹配的安装凹槽;弹簧两端设有堵头,堵头端部设有螺纹孔可与端盖用螺钉配合连接;气囊下接头侧面设有螺纹孔与下端盖通过螺钉配合连接;然后依序套装约束环,最后将气囊和弹簧与上端盖采用螺钉连接方式装配,完成驱动器制作。
通入压缩气体后,驱动器内人工肌肉的气囊内壁受压发生膨胀,外部由于约束元件的径向束缚产生轴向力驱动关节运动。驱动器的功能特性如图2所示。未通气时,驱动器状态如图2a所示;当3根肌肉同时通入相同气压时,柔性驱动器沿轴线方向伸长,如图2b所示;当单根或2根肌肉组合通气时,驱动器伸长的同时发生弯曲,如图2c和图2d所示;当3根肌肉通入不同气压时,驱动器向空间不同方向弯曲,如图3所示。

图2 驱动器功能特性Fig.2 Functional characteristics of FPA
驱动器弯曲时沿约束环边缘处做类似圆弧状弯曲,具有无轴多铰链的弹性弯曲特征,如图4a所示。单根肌肉和2根肌肉分别通气下驱动器内侧弯曲轮廓的数据点进行圆弧拟合,如图4b所示。

图3 驱动器弯曲方向Fig.3 Bending direction of FPA

图4 驱动器弯曲弧线Fig.4 Bendingarc of FPA
由驱动器内侧弯曲曲线上数据点到圆心的距离与拟合圆半径进行对比,可得到驱动器弯曲圆弧误差。单根肌肉驱动时驱动器弯曲圆弧误差为0.29%,2根肌肉驱动时驱动器弯曲圆弧误差为0.49%。对比结果表明,驱动器弯曲时沿约束环一侧做圆弧状弯曲。
2 柔性驱动器轴向受力和形变分析
通入压缩气体后,驱动器端部同时受轴向力和弯曲力矩的共同作用,产生复合变形。轴向力决定驱动器的伸长量,端盖处的合力矩决定驱动器弯曲的角度和方向。
图5为驱动器的轴向伸长变形。R1、R2、R3和T1、T2、T3分别为组成关节的3个人工肌肉和3个弹性骨架。人工肌肉通入气压pi=p,其中i=1,2,3,为肌肉编号。

图5 驱动器轴向变形与受力分析Fig.5 Axial deformation and stress analysis of FPA
通入压缩气体后,人工肌肉内壁受压膨胀,压缩气体在驱动器端盖部产生驱动力Fpi。驱动器在轴向力作用下,沿轴向方向自由伸长变形。驱动器轴向变形过程中,弹性骨架和人工肌肉产生相应的轴向应变,阻碍驱动器伸长产生阻抗力。
根据驱动器轴向静力平衡方程可知
(1)
式中FTi——弹性骨架阻抗力FRi——人工肌肉阻抗力
2.1 轴向驱动力
压力气体在驱动器端盖产生驱动力为
Fpi=piSi
(2)
式中Si——肌肉变形后内腔横截面面积

图6 肌肉变形前后几何关系Fig.6 Geometric relationship between undeformed and deformed muscles
人工肌肉轴向变形过程中,因肌肉内壁受压拉伸变薄,肌肉内腔工作截面发生变化,如图6所示。
构成肌肉的橡胶材料是各向同性不可压缩的超弹性体,由变形前后胶囊体积不变可得肌肉变形后内腔横截面积。肌肉变形后体积V为
V=ΔS0l0=ΔS′(l0+Δl)
(3)
式中 ΔS0——变形前肌肉环形截面积 ΔS′——变形后肌肉环形截面积l0——人工肌肉有效原始长度 Δl——人工肌肉伸长量
由于人工肌肉伸长后约束环间存在间隙,不能完全限制胶管外侧形变(图7,d表示约束环厚度,δ表示约束环间初始间隙),胶管外侧将沿约束环的间隙膨胀,肌肉初始横截面积S0将增加,因此需要加入肌肉内腔横截面积修正量ΔS。肌肉变形前后的环形截面积为
(4)
式中S——肌肉变形前内腔横截面积D1——乳胶管原始外径D2——乳胶管原始内径将式(4)代入式(3)可得,肌肉变形后的内腔横截面面积为

图7 0.3 MPa下不同约束边界下乳胶管变形Fig.7 Deformation of rubber tube under different constraint boundary conditions when air pressure was 0.3 MPa

(5)
式中,ΔS与约束环形状、尺寸和排列间隙有关,可由理论值与实验数据对比求得。
2.2 弹性骨架阻抗力
弹性骨架阻碍驱动器轴向伸长时产生阻抗力,根据Hooke定律,弹性骨架阻抗力为
FTi=kTΔl
(6)
其中
(7)
式中kT——弹簧刚度GT——弹簧剪切弹性模量D——弹簧中径n——弹簧圈数d——钢丝直径
2.3 人工肌肉阻抗力
驱动器轴向伸长时,人工肌肉同样产生相同的轴向应变,阻碍其伸长。假设约束环完全限制人工肌肉外侧变形,且肌肉伸长时不发生扭转,由Neo-Hookean模型推导出人工肌肉轴向伸长时阻抗力[20]为
(8)
式中GR——肌肉剪切弹性模量
当3根人工肌肉通入相同气压时,驱动器端盖处的合力矩为零,驱动器仅受到轴向力作用,只产生轴向变形。假设弹性骨架和人工肌肉轴向变形量协调同步,忽略二者耦合力影响,且变形力符合线性叠加。将式(2)、式(6)和式(8)代入式(1),忽略高次微小量,驱动器轴向伸长量为

(9)
3 驱动器弯曲变形分析
当3根人工肌肉通入不同气压时,除轴向变形外,驱动器受到端部力矩作用向空间不同方向弯曲变形(图8a)。此时,驱动器端部合力矩Mg方向即为弯曲方向;弹性骨架和人工肌肉随驱动器弯曲变形产生相同的弯曲形变,阻碍驱动器弯曲产生阻抗力力矩,如图8b、8c所示。

图8 柔性驱动器弯曲变形Fig.8 Bending properties of FPA
通入压缩气体后,驱动器端部受到的力矩为
(10)
单个人工肌肉产生的力矩为
Mi=piSil(i=1,2,3)
(11)
式中l——人工肌肉中心到关节中心的距离
3.1 驱动器弯曲方向
根据驱动器端盖处受到力矩分析(图9)可知,驱动器弯曲方向角为

(12)
其中Mgx=(M2+M3)sinα-M1
(13)
Mgy=(M3-M2)cosα
(14)
式中Mgx——合力矩在X方向分量Mgy——合力矩在Y方向分量α——人工肌肉驱动力矩方向与Y轴的夹角由图9几何关系求得α=π/6。

图9 柔性驱动器弯曲方向Fig.9 Analysis on bending direction of FPA
将式(13)和式(14)代入式(12)得合力矩弯曲方向与通入气压的关系为

(15)
3.2 驱动器弯曲角度
当3根人工肌肉通入不同气压时,驱动器开始向不同方向弯曲。此时,驱动器除受到轴向力,还将受到压力气体在端部产生弯曲力矩M。驱动器外部的约束环只作为约束铰链,限制内部乳胶管的径向膨胀,不产生阻抗力矩。因此阻碍柔性驱动器弯曲变形的因素有2项,分别为弹性骨架产生的阻抗力矩MT和人工肌肉产生的阻抗力矩MR。
根据驱动器弯曲力矩平衡方程可知
(16)
驱动器在压缩气体的作用下沿中性层弯曲,肌肉和弹性骨架与中性层距离如图10所示。柔性驱动器内人工肌肉与弹性骨架分布在同一圆周上。

图10 肌肉和弹性骨架与中性层距离Fig.10 Distance from muscle and elastic skeleton to neutral layer
由于人工肌肉中心对称分布,驱动器在等分的3个区域Ⅰ、Ⅱ和Ⅲ内弯曲情况相同。




(1)驱动力矩
此时,肌肉R2、R3伸长,R1压缩。驱动器端部驱动力矩为人工肌肉驱动力矩在中性层平面法向分量

(17)
其中由图10几何关系可知
(18)
式中l1、l2、l3——人工肌肉中心到驱动器弯曲变形中性层距离
(2)弹性骨架阻抗力矩
弹性骨架T2伸长,T1、T3压缩。由于驱动器弯曲时为圆弧状,则驱动器弯曲状态下的变形协调方程为
(19)
弹性骨架阻碍驱动器弯曲变形时,除绕本体弯曲时产生的弯曲力矩Mk外,还有绕驱动器弯曲中心弯曲的耦合力矩M′Ti(图8b)。
根据变形协调条件,假设弹性骨架弯曲力矩符合线性叠加,并考虑弹性骨架轴向产生的耦合力矩,可知弹性骨架负载力矩为
(20)
式中l′1、l′2、l′3——弹性骨架中心到驱动器弯曲变 形中性层的距离,由图10几何关系可知l′1=l3,l′2=l1,l′3=l2
Mk——弹簧弯曲力矩
根据圆柱螺旋弹簧受纯弯矩变形公式,考虑预应力对圆柱螺旋弹簧弯曲变形的影响[21],可得圆柱螺旋弹簧的弯曲力矩为
(21)
式中E1——弹簧弹性模量μ——泊松比
(3)人工肌肉阻抗力矩
人工肌肉弯曲时产生的阻抗力矩与弹性骨架相同,包含本体阻抗力矩Mn和耦合力矩M′Ri(图8c)。
驱动器弯曲状态下肌肉的变形协调方程为
(22)
同理,可知肌肉负载力矩为

(23)
其中
(24)
式中Mn——肌肉弯曲力矩kR——乳胶管轴向刚度
乳胶管本体的弯曲力矩与转角的关系[22]为

(25)
式中E2——乳胶管弹性模量

肌肉R3伸长,R1、R2压缩;弹性骨架T2、T3伸长,T1压缩。
驱动器驱动力矩为
(26)
其中
(27)
驱动器弯曲状态下弹性骨架和肌肉的变形协调方程分别为
(28)
(29)
弹性骨架和肌肉的阻抗力矩分别为
(30)

(31)

肌肉R1、R2伸长,R3压缩;弹性骨架T3伸长,T1、T2压缩。
驱动器驱动力矩为
(32)
其中
(33)
驱动器弯曲状态下弹性骨架和肌肉的变形协调方程分别为
(34)
(35)
弹性骨架和肌肉的阻抗力矩分别为
(36)

(37)
将式(11)~(37)代入式(10)可得,驱动器在第Ⅰ区域内的弯曲角度。
4 试验与分析
柔性驱动器的弯曲试验装置如图11所示。该试验装置主要由气源、精密减压阀、单片机、陀螺仪和磁罗盘传感器组成。通过减压阀调节3个人工肌肉通入的气体压力,控制驱动器的弯曲方向和弯曲角度,采用陀螺仪和磁罗盘传感器测量驱动器的弯曲方向角和弯曲角度,再经由Freescale单片机进行数据采集和计算。驱动器有效长度为50 mm,直径30 mm,质量200 g。约束环材料为ABS塑料,驱动器具体材料参数如表1所示。

图11 驱动器静力学试验装置Fig.11 Static experimental devices of FPA1.单片机 2.精密减压阀 3.柔性驱动器 4.陀螺仪和磁罗盘传感器
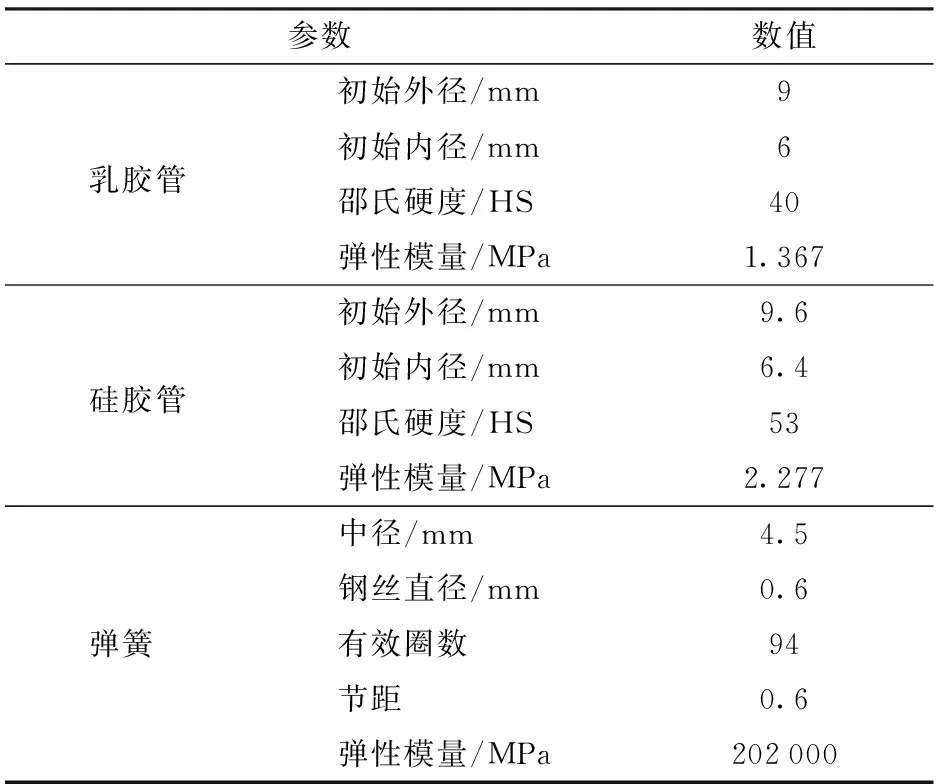
参数数值初始外径/mm9乳胶管初始内径/mm6邵氏硬度/HS40弹性模量/MPa1.367初始外径/mm9.6硅胶管初始内径/mm6.4邵氏硬度/HS53弹性模量/MPa2.277中径/mm4.5钢丝直径/mm0.6弹簧有效圈数94节距0.6弹性模量/MPa202000
4.1 肌肉变形前内腔横截面积
人工肌肉内腔横截面积与气压的关系如图12所示。将采用厚度为2 mm,间隙分别为0 mm和1 mm圆柱状约束环的人工肌肉内腔横截面积的理论计算结果与试验测得的数据进行拟合,可得内腔面积修正量ΔS分别为15.5 mm2和17.5 mm2。由图12可以看出,理论计算值和试验数据趋势一致,吻合较好。随着气压的增加,人工肌肉内腔横截面积随之增大。通过调整通入气体压力,可以控制人工肌肉的形变量。

图12 肌肉内腔横截面积随气压的变化曲线Fig.12 Variation curves of cross-sectional area of muscle with air pressure
4.2 驱动器轴向伸长
图13为采用不同气囊材料的柔性驱动器在不同气压下的伸长量。

图13 驱动器伸长量随气压的变化曲线Fig.13 Variation curves of elongation of FPA with air pressure
从图13可以看到,驱动器的伸长量理论计算与试验数据趋势一致,吻合较好,其伸长量随着通入气压的增加而增加。由于在不同压强下肌肉变形后内孔横截面不同,肌肉驱动力不一致。导致驱动器的伸长量呈非线性变化。由于硅胶管的硬度和弹性模量较强,其伸长量小于乳胶管。
4.3 驱动器弯曲方向
驱动器弯曲的起始方向为X轴正向(图9)。将表1所示驱动器参数和通入的气压代入式(15)可得如图14所示的驱动器弯曲方向随气压变化情况。驱动器弯曲方向理论计算与试验数据对比可知,驱动器弯曲方向的理论计算与试验数据趋势一致,吻合较好,能够真实地反映通气后驱动器的弯曲方向。在p1和p2通入气压保持恒定不变时,随着人工肌肉通入气压p3的增加,驱动器的弯曲方向角随之增加或减小。

图14 驱动器弯曲方向角随气压的变化曲线Fig.14 Variation curves of bending direction of FPA
保持其中1根通入气压恒定不变,通过调整其它2根人工肌肉通入的气压,可以控制驱动器在0~360°范围内任意方向弯曲,如图15所示。当p1、p2、p3分别通入0.35 MPa气压时,驱动器弯曲方向可由其他2根肌肉通入的气压进行控制。驱动器弯曲方向角120°和240°为人工肌肉通气变更的分界线,随着气压的增加驱动器弯方向角变化趋势平缓。

图15 驱动器弯曲方向角随气压的变化曲面Fig.15 Variaton surfaces of bending direction of FPA with air pressure
4.4 驱动器弯曲角度
图16为驱动器弯曲角度随气压的变化。由图16可知,理论计算值和试验数据趋势一致,曲线吻合较好。当p1和p2通入相同气压,p3不通气时或p1和p2不通气,p3通气时,驱动器弯曲角度随通入气压的增加而增大。
通过调整3根人工肌肉通气压力,可实现驱动器向不同方向弯曲,其弯曲角度如图17所示。由图中可知,p1通入气压保持不变时,随着p2和p3通入气压的增加,驱动器弯曲角度逐渐增加并呈非线性变化,弯曲角度范围为0°~57.8°。驱动器弯曲角度最大值为双肌肉驱动时,即p1=0,p2=p3=0.35 MPa(图17a)。驱动器弯曲角度最小值为3根肌肉通入相同气压时,即p1=p2=p3,驱动器仅伸长不弯曲,此时弯曲角度为0°。

图16 驱动器弯曲角度随气压的变化曲线Fig.16 Variation curves of bending angle of FPA

图17 驱动器弯曲角度随气压的变化曲面Fig.17 Variation surfaces of bending angle with air pressure
5 驱动器在农业采摘领域应用
三自由度柔性驱动器具有较好的柔性,可以实现轴向伸长和向空间任意方向弯曲,可作为机械手的末端执行器。采用该驱动器研制的三指气动柔性果蔬采摘机械手,其结构如图18所示。该机械手包含3个柔性手指和1个柔性腕部,具有10个自由度,可实现抓、握、夹和拧等功能,适于抓取苹果、桔子和西红柿等球形果蔬。

图18 柔性机械手结构图Fig.18 Structure diagram of flexible robot hand1.手腕 2.手掌 3.手指 4.三自由度柔性驱动器
6 结束语
气动柔性驱动器由3根伸长型人工肌肉并联组成。通入压缩气体后,驱动器为弹性体变形,能实现弯曲和伸长。外部约束环作为约束铰链,沿约束环一侧做圆弧状弯曲,其弯曲方向和角度主要取决于驱动器端盖受到的合力矩的大小和方向。建立了驱动器在气压下的形变理论模型,获得了其轴向伸长量、弯曲方向和弯曲角度与通入气压的变化规律。试验结果表明,通过控制人工肌肉内气体压力,该柔性驱动器可以实现轴向伸长,向空间任意方向和不同角度弯曲。驱动器伸长量和弯曲角度随着通入气体压强增加而增大,且驱动器弯曲方向角过渡平滑,适于作为末端执行器应用在果蔬采摘机械手上。在0.35 MPa下,形变后其轴向伸长量可达50%,弯曲角度可达60°,弯曲方向角范围为0°~360°。
1 王燕,杨庆华,鲍官军,等. 关节型果蔬采摘机械臂优化设计与试验[J]. 农业机械学报, 2011, 42(7): 191-195. WANG Yan, YANG Qinghua, BAO Guanjun, et al. Optimization design and experiment of fruit and vegetable picking manipulator[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(7):191-195.(in Chinese)
2 李国利, 姬长英, 顾宝兴,等. 多末端苹果采摘机器人机械手运动学分析与试验[J/OL]. 农业机械学报, 2016, 47(12):14-21.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161203&journal_id=jcsam. DOI:10.6041 /j issn.1000-1298.2016.12.003. LI Guoli, JI Changying, GU Baoxing, et al. Kinematics analysis and experiment of apple harvesting robot manipulator with multiple end-effectors[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12):14-21.(in Chinese)
3 傅隆生, 张发年, 槐岛芳德,等. 猕猴桃采摘机器人末端执行器设计与试验[J/OL].农业机械学报, 2015, 46(3):1-7. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150301&journal_id=jcsam. DOI:10.6041 /j.issn.1000-1298.2015.03.001. FU Longsheng, ZHANG Fanian, GEJIMA Y, et al. Development and experiment of end-effector for kiwifruit harvesting robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):1-7.(in Chinese)
4 KORAYEM M H, RAHIMI H N, NIKOOBIN A. Mathematical modeling and trajectory planning of mobile manipulators with flexible links and joints [J]. Applied Mathematical Modelling, 2012,36(7): 3229-3244.
5 HARAGUCHI D,TADANO K, KAWASHIMA K. Development of a pneumatically-driven robotic forceps with a flexible wris joint [J]. Procedia CIRP, 2013, 5: 61-65.
6 KORAYEM M H, RAHIMI H N, NIKOOBIN A. Flexible artificial muscle actuator using coiled shape memory alloy wires [J]. APCBEE Procedia, 2013, 7:54-59.
7 ZHANG J J, YIN Y H. SMA-based bionic integration design of self-sensor-actuator-structure for artificial skeletal muscle [J]. Sensors and Actuators A:Physical, 2012, 181:94-102.
8 CHEN D H, USHIJIM K. Prediction of the mechanical performance of McKibben artificial muscle actuator[J]. International Journal of Mechanical Sciences, 2014, 78:183-192.
9 GREEF A D, LAMBERT P, DELCHAMBRE A. Towards flexible medical instruments: review of flexible fluidic actuators [J]. Precision Engineering, 2009, 33:311-321.
10 TAKASHIMA K, ROSSITER J, MUKAI T. McKibben artificial muscle using shape-memory polymer [J]. Sensors and Actuators A:Physical, 2010, 164:116-124.
11 WICKRAMATUNGE K C, LEEPHAKPREEDA T. Empirical modeling of dynamic behaviors of pneumatic artificial muscle actuators [J]. ISA Transactions, 2013, 52:825-834.
12 NUCHKRUA T, LEEPHAKPREEDA T. Fuzzy self-tuning PID control of hydrogen-driven pneumatic artificial muscle actuator[J]. Journal of Bionic Engineering, 2013, 10(3):329-340.
13 SHI G L, SHEN W. Hybrid control of a parallel platform based on pneumatic artificial muscles combining sliding mode controller and adaptive fuzzy CMAC[J]. Control Engineering Practice, 2013, 21(1): 76-86.
14 ZHU X C, TAO G L, YAO B, et al. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles [J]. Automatica, 2008, 44(9):2248-2257.
15 李尚会, 杨庆华, 鲍官军, 等. 基于FPA 的新型气动柔性球关节的研究[J]. 浙江工业大学学报, 2009, 37(6): 662-666. LI Shanghui, YANG Qinghua , BAO Guanjun , et al. Research on flexible pneumatic spherical joint based on FPA[J]. Journal of Zhejiang University of Technology, 2009, 37(6): 662-666. (in Chinese)
16 SUZUMORI K, IIKURA S, TANAKA H. Flexible microactuator for miniature robots[C]∥Proceedings of the 1991 IEEE Workshop on Micro Electro Mechanical Systems, 1991: 204-209.
17 SUZUMORI K, IIKURA S, TANAKA H. Applying a flexible microactuator to robotic mechanisms [J]. IEEE Control Systems, 1992, 12(1): 21-27.
18 SUZUMORI K, MAEDA T, WATANABE H, et al. Fiberless flexible microactuator designed by finite-element method [J]. IEEE/ASME Transactions on Mechatronics, 1997, 2(4): 281-286.
19 于莲芝,颜国正,马官营,等. 一种柔性移动微小机器人系统的驱动力学特性分析[J]. 仪器仪表学报, 2007, 28(1): 7-11. YU Lianzhi, YAN Guozheng, MA Guanying, et al. Analysis of actuating mechanics characteristics for a flexible miniature robot system[J]. Chinese Journal of Scientific Instrument, 2007, 28(1): 7-11. (in Chinese)
20 GENG D X, ZHAO J, ZHANG L, et al. Mechanical Properties analysis on elongation type of pneumatic artificial muscles[C]∥2nd International Conference on Mechanical, Industrial, and Manufacturing Technologies, 2011: 437-441.
21 钟文彬, 李柏林, 晏星凡. 预应力圆柱螺旋弹簧弯曲弹性特性研究[J]. 机械设计, 2008, 25(1):25-27. ZHONG Wenbin, LI Bailin, YAN Xingfan. Characteristic research on bending elasticity of prestressed cylindrical helical spring[J].Journal of Machine Design, 2008, 25(1):25-27. (in Chinese)
22 GENG D X, ZHAO J, ZHANG L. Study on bidirectional controllable flexible bending joints based on elongation artificial muscles [J]. Applied Mechanics and Materials, 2011, 44-47: 2883-2887.
StructureandDeformationCharacteristicsof3-DOFPneumaticFlexibleActuator
ZHAO Yunwei1GENG Dexu1LIU Xiaomin1LIU Hongbo1ZHENG Yongyong2
(1.EngineeringTrainingCenter,BeihuaUniversity,Jilin132021,China2.CollegeofMechanicalEngineering,BeihuaUniversity,Jilin132021,China)
A type of 3-DOF flexible pneumatic actuator (FPA) employing elongation pneumatic artificial muscles was developed. It was mainly composed by three pneumatic artificial muscles symmetrically distributed in parallel and three artificial muscles were fixed 120° each other in space. The pneumatic artificial muscle was a closed cavity formed by the rubber tube and the end covers, and the outer side of it was thin sheet restraint rings set compacted. The elastic skeletons were added among the artificial muscles to improve the rigidity and stability of FPA. Specially, the driving device of FPA was just the body of the actuator. The FPA has the advantages of small volume, light weight and multiple degrees of freedom, and it can axially elongate and bend in any direction by controlling the input gas pressure of different artificial muscles. According to the force and torque analysis, the nonlinear theoretical model was developed to simultaneously describe the elongation, bending direction and bending angle of the FPA. Further, the theoretical model was verified by experiments, and then the deforming properties of FPA were obtained under different ventilation modes. The results showed that the FPA was in arc shape approximately when it was bent; it had high flexibility to elongate in axial direction or bend in any direction which had the similarity to the biological muscles in the body flexibility, movement and driving ability. In summary, this type of FPA can be as flexible fingers or flexible joints applied to fruit and vegetable picking manipulator or agricultural robot.
artificial muscle; pneumatic flexible actuator; spacing bending; deformation characteristics
TH138.5
A
1000-1298(2017)09-0392-10
10.6041/j.issn.1000-1298.2017.09.050
2016-12-29
2017-03-07
国家自然科学基金项目(51275004)、吉林省自然科学基金项目(20150101026JC)、吉林省科技发展计划项目(20150520109JH)、吉林省教育厅“十二五”科学技术研究项目(20150158)和北华大学青年教师提升计划项目
赵云伟(1978—),男,副教授,博士,主要从事智能精密制造和机器人技术研究,E-mail: jluzyw@163.com
耿德旭(1964—),男,教授,博士,主要从事智能精密制造、机械系统动力学和机器人技术研究,E-mail: gengdx64@163.com
猜你喜欢
电子乐园·上旬刊(2022年5期)2022-04-09
幼儿画刊(2021年5期)2021-12-02
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
装备制造技术(2020年12期)2020-05-22
中国新技术新产品(2020年5期)2020-05-06
模具制造(2019年4期)2019-06-24
北京航空航天大学学报(2017年5期)2017-11-23
农业工程技术·温室园艺(2017年3期)2017-07-13
浙江大学学报(工学版)(2015年7期)2015-03-01