
基于任务区分的无人机航路规划方法*
2017-11-01 22:48欧阳志宏李修和
弹箭与制导学报 2017年3期
欧阳志宏, 李修和
(电子工程学院, 合肥 230037)
基于任务区分的无人机航路规划方法*
欧阳志宏, 李修和
(电子工程学院, 合肥 230037)
军用无人机飞行航路必须基于作战任务规划,在任务完成和飞行安全之间体现不同侧重。文中将无人机航路规划问题区分为固定航路规划和突防航路规划,阐明了各自的规划要点,提出的基于任务完成度的固定航路规划方法和基于改进蚁群算法的突防航路规划方法,能够满足无人机不同作战任务需求。通过算法仿真和作战仿真系统的应用实践,证明了文中方法的合理性和实用性。
无人机;任务区分;固定航路规划;突防航路规划
0 引言
现代战争中,无人机承担着情报侦察、战场监视、支援干扰、伴随防护、火力打击等多重作战任务,是常规作战手段的有力补充。无人机航路规划就是要在充分掌握地形和敌情的前提下,依据具体任务明确飞行约束条件,寻找从初始点到目标点并且满足某种性能指标最优的运动轨迹。现有的航路规划方法[1-2]大多聚焦于如何回避威胁,确保飞行安全,却忽略了作战任务对航路类型和规划结果的影响。
然而,军用无人机大多有其具体作战使命,航路规划必须针对作战任务有所区分,体现不同侧重。文中以电子对抗无人机为例,针对不同作战任务特点,将航路规划问题区分为固定航路规划和突防航路规划,充分分析了两类问题的规划要点,并进一步提出了基于任务完成度的固定航路规划方法,以及基于改进蚁群算法的突防航路规划方法,满足国内现有军用无人机装备作战任务需求。
1 航路规划的任务区分
军用无人机规划的航路应是在无人机回避地形和火力威胁以实现战场生存的前提下,充分发挥飞机性能的要求,确保最大限度地完成作战任务,某些情况下甚至需要牺牲一定的安全性考虑。所以,依据无人机不同的作战任务和使命,航路规划可区分为固定航路规划和突防航路规划[3-4]。
以电子对抗无人机为例,其典型作战任务为远距侦察和支援干扰、抵近侦察和伴随防护两类。固定航路规划主要满足无人机完成远距侦察和支援干扰任务,任务范围一般在敌威胁范围以外,战斗分界线以内。航路规划一般在地面准备阶段实施,通过搜集的任务区域地形情况和敌方威胁信息,运用数字地图对各威胁点和周围区域的危险程度进行量化处理,然后按飞机性能指标、基本航路类型和预定规则进行全局航路规划并对无人机装载航路点。无人机起飞后通常不改变预定航路[5]。
突防航路规划主要满足无人机完成抵近侦察和伴随防护任务。可分为两个层次:第一层为整体航线规划,第二层为航迹的动态优化。在确知敌部分固定威胁的情况下,由任务设备在地面准备阶段预先规划整体最优路径,无人机起飞后按此参考航路飞行以执行抵近侦察或掩护攻击机群执行伴随干扰任务;当遭遇敌高炮、导弹等机动性和突然性火力威胁时,无人机应根据环境变化实时修正参考航线,动态的生成最优航迹并沿着最优航迹飞行以规避威胁。
2 规划要点分析
针对固定与突防两类航路规划问题,无人机航路规划的要点分别体现在任务完成度和飞行安全度上。
任务完成度是固定航路规划的首要考虑因素,可用任务时长来衡量。也就是说,无人机沿固定航路飞行,要求其到达任务区域后,最大限度地延长任务执行时间,如侦察时长或干扰时长。考虑的约束条件主要是武器性能、任务约束、飞行性能等。
以某型电子对抗无人机为例,其武器性能约束体现在侦察干扰天线不具备360°旋转能力,两组天线安装在机翼两侧,因此只有在单侧天线对准目标时才能实施侦察和干扰[7]。任务约束体现在无人机应满足任务范围要求且飞行不超出任务范围,也就是说,在不确知目标位置的情况下,尽量覆盖任务范围飞行,做到无盲区;而又不超出任务范围,以实现燃油的节约使用。实践证明,飞机进入航路任务段后,航路边缘与任务区域边界相切效果最佳。
综上所述,针对上述某型无人机规划的环形跑道航路如图1所示。
无人机在航路直线段飞行时执行侦察和干扰任务,考虑匀速飞行,任务时长约为:
T=n·2L/v
(1)
式中:L为航路直线段长度;v为速度。
飞行安全度[6]是突防航路规划的首要考虑因素,可用飞行区域与威胁区域的重合面积来衡量。突防过程的威胁主要来自地形起伏威胁和敌方固定与机动威胁。一方面要考虑地形起伏因素,确保离地高度,躲避危险地形和恶劣天气等;另一方面要尽量回避敌方雷达探测,脱离敌方地面固定防空武器和机动火力打击范围。将地形威胁和敌方打击威胁分别以区域QD和QH表示,无人机应能够绕过威胁区域飞行,如图2所示。
飞行区域为QF,飞行安全度的最高要求是:
QD∪QH∩QF=∅
(2)
3 航路规划方法
3.1 固定航路规划方法
文中以环形跑道航路这种最常见的航路规划为例,在考虑敌固定威胁的前提下,提出基于任务完成度的固定航路规划方法,通过逼近、前伸、回退3个步骤,探索最优航路。航路搜索流程如图3所示。
具体搜索过程如下:
1)为满足任务完成度要求,无人机以下式为约束尽可能前伸其航路,即最优航路搜索时D逐步增大,则可同时满足直线段最大任务时长。
(3)
式中:S为飞行n圈的总航程;D为起飞段长度;R可设为最小转弯半径。
2)D增大到航路与战斗分界线相切,即达到最大的前伸,超过分界线就有可能遭受探测和打击威胁,以此形成航路S1。
建立二维直角坐标系,设战斗分界线在与航路的交点(x1,y1)处形成的切线与水平方向夹角为θ,如图4所示。
满足:
(4)
交点满足战斗分界线曲线条件即可计算得出航路基本参数。
Z=f(x1,y1)
(5)
3)计算当前剩余的燃油,并进一步增加D,以式(3)为约束保证相同的飞行圈数n,直至剩余的燃油减至最低,形成航路S2。显然,S2部分处于敌威力范围,反映出牺牲安全性去追求更大的任务时长。
4)相反地,返回步骤2),以式(3)为约束逐步减小D直至飞行圈数变为n+1,形成航路S3。航路S3较S1和S2多一圈,任务时间有更长的可能性。
5)综合比较航路S1、S2和S3,其中S1具有良好的前伸性和最佳的安全性;S2具有最佳的前伸性和较S1更好的任务完成度,但存在一定威胁;S3有最佳的安全性,但前伸性较弱。最后,进行任务完成度决策,由人工根据战场情况和任务需求选择最优航路。
3.2 突防航路规划方法
突防航路规划的计算量和实时性问题是规划的要点。文中依据典型突防航路规划思路,提出了基于改进蚁群算法的航路规划方法,将目标点及其周围点对蚁群的末端诱惑引入信息素更新,使得算法在结果准确性和收敛速度上均有所提升。航路搜索基本流程如图5所示。
具体搜索过程如下:
1)初始化
初始化主要针对蚁群和信息素进行。蚁群初始化包括起点和终点、移动规则、蚁群规模m、信息启发式因子α、期望启发式因子β等。信息素初始化包括初始信息素Q、挥发程度系数ε和信息素修正权值e等。蚁群移动限定蚂蚁在栅格地图中位于节点(i,j)的可搜索范围为节点(i+1,j+1)、节点(i+1,j)和节点(i+1,j-1),如图6所示。
2)引入目标诱惑
以往的蚁群算法蚁群在第一次搜索航路时仅考虑固定威胁,无其它任何先验信息,航路具有很大的随机性,导致能够走到目标点的蚂蚁数量很少,从而后续完成全部搜索形成稳定的最优航路所需时间较长。
然而,蚂蚁在接近目标点时,可通过多维感官感受到附近存在对其有吸引力的目标,且越接近吸引力越强。也就是说,目标点对蚂蚁存在诱惑性,反映在算法中可以对目标点及其临近点增加信息素在路径的末端诱使蚂蚁以更大的概率走向目标点。
设全局信息素矩阵为I,则引入目标诱惑后的I*更新为
I*=I+IY
(6)
目标诱惑引入的信息素IY是一种固有信息素,不会消逝也不会增加,对每一群搜索蚂蚁的吸引力相同。
3)启动搜索,获取最优解
蚁群自起点按移动规则和沿途信息素强弱开始路径搜索,首先根据各条路径上的信息量及路径的启发信息来计算状态转移概率。转移概率的计算公式为:
(7)
式中:xs为当前时刻蚂蚁所在节点;xe为蚂蚁下一时刻要前往的节点,该节点符合移动规则。τ(xs,xe)表示节点xs到节点xe的信息素强度,一般可将其等效于节点xe的信息素强度,无法前往的点或威胁点信息素为0;η(xs,xe)表示节点xs到节点xe的可见性,是节点间移动的代价或油耗的倒数,表达式如下:
(8)
蚂蚁从结点(i,j)移动至节点(i+1,j+1)、节点(i+1,j)和节点(i+1,j-1)的概率分别为p1、p2和p3,显然满足:
p1+p2+p3=1
(9)
然后,根据计算的转移概率采取赌轮法随机选取下一个节点。按此方法进行搜索,直至栅格地图终点。一次搜索过程,m只蚂蚁中,部分蚂蚁能够到达指定目标点,另一部分偏离目标点,而又有部分中途遇到威胁终结生命。
比较每只蚂蚁所经过路径的航路代价,可以得到这次搜索过程中的最优航路,称之为局部最优航路。将局部最优航路的航路代价与之前的全局最优航路的航路代价作比较,若本次搜索得到的局部最优航路的航路代价小于全局最优航路的航路代价,则将本次局部最优航路作为全局最优航路;否则,全局最优航路不变。
4)信息素更新
引入的目标诱惑不属于信息素更新的范畴,所以信息素更新前应去除目标点及其周围点增加的信息素。信息素矩阵的第一次更新I1为:
I1=I*-IY
(10)
然后以固定挥发量、局部最优路径增量和全局最优路径增量的方式,更新各单元信息素。设ε为挥发系数,ei、ea和Ii、Iq分别为局部最优路径和全局最优路径的信息素修正权值和修正量。信息素矩阵的第二次更新I2为:
I2=(1-ε)I1+ejIj+eqIq
(11)
最后为下一次搜索再次加入固定的目标诱惑信息素。信息素矩阵的第三次更新I3为:
I3=I2+IY
(12)
5)形成全局最优航路
重复步骤2)~步骤4),进行多轮次搜索,更新全局最优解。直至完成全部搜索,形成全局最优航路。
4 仿真实例与系统运用
4.1 仿真实例
为验证文中基于改进蚁群算法的航路规划方法较以往方法具有更好的准确性和收敛速度,设置仿真场景:蚁群规模m为20只,ε为0.5,ei、ea为1.5和1.8,α、β为1.0和1.1,起点A和终点B分别位于(1,9)和(16,9),在栅格地图中,设置若干威胁点。某次搜索的3只蚂蚁行走情况如图7所示。
对蚁群执行5轮、10轮、20轮搜索分别进行500次蒙特卡洛仿真,对比以往算法和文中改进蚁群算法的航路搜索结果,搜索成功次数统计数据如表1所示。

表1 航路搜索成功次数对照表
针对蚁群执行20轮搜索进行的500次蒙特卡洛仿真,形成最优航路所需搜索轮数统计数据如表2所示。

表2 最优航路形成平均搜索轮数对照表
显然,基于改进蚁群算法的航路规划方法在搜索成功率和速率上优于以往蚁群航路规划方法,尤其是在较少的搜索次数上能够以较大概率快速获取全局最优航路,在实时性上满足实战中突防航路规划要求。
4.2 系统运用
文中的航路规划方法已经成功应用于电子对抗无人机仿真模型嵌入陆军某电子对抗装备仿真系统供部队使用。设计的航路规划模块及其交互关系概要如图8所示。
系统以正北方向为0°,设定无人机任务范围为(0°,350°),战斗分界线为斜45°不规则曲线,无人机飞行速度为130 km/h,飞行高度4 000 m,起飞点与战斗分界线垂直距离75 km。规划的逼近、前伸、回退3种航路的基本参数如表3所示。
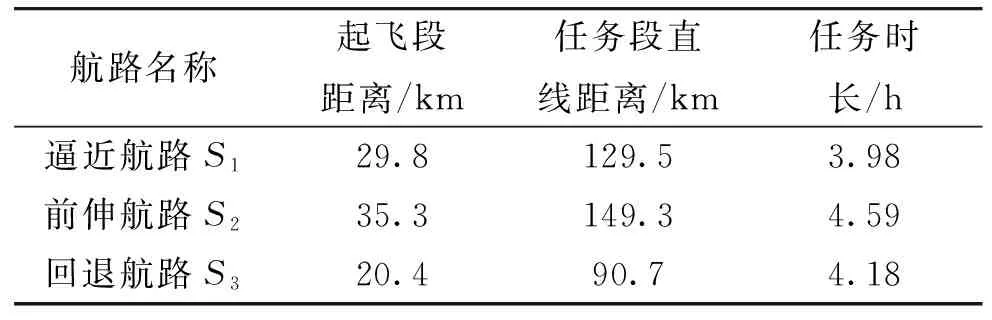
表3 航路搜索结果对照表
可见,前伸航路的侦察干扰任务执行时间最长,人工选择前伸航路S2,如图9所示。
6 结束语
文中基于无人机作战任务将航路规划问题区分为固定航路规划和突防航路规划,分别提出了具体的航路规划方法,并通过作战仿真应用对方法进行了验证。航路规划系统的发展方向是具备面对不确定环境的实时自适应航路规划能力,单一的规划方法显然难以满足需求,分层、分段、分区域的多种规划方法的融合,既有大范围的离线规划,又有小范围的在线修正,是下一步的研究重点。
[1] 董文洪, 易波, 栗飞. Memetic算法在无人机侦察航路规划中的应用 [J]. 弹箭与制导学报, 2012, 32(1): 211-214.
[2] 叶文, 朱爱红, 范洪达. 低空突防航路规划算法综述 [J]. 系统仿真学报, 2007, 19(10): 2357-2360.
[3] SZCZERBA R J, GALKOWSKI P,GLICK STEINI, et al. Robust algorithm for real-time route planning [J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(3): 869-878.
[4] 唐上钦, 黄长强, 胡杰, 等. 基于威胁等效和改进PSO算法的UCAV实时航路规划方法 [J]. 系统工程与电子技术, 2010, 32(8): 1706-1710.
[5] 李子杰, 刘湘伟, 汤博, 等. 基于进化算法的雷达对抗侦察无人机航路规划 [J]. 火力与指挥控制, 2013, 38(6): 51-54.
[6] 王庆江, 高晓光, 符小卫. 无威胁情况下任意两点间无人机路径规划 [J]. 系统工程与电子技术, 2009, 31(9): 2157-2462.
[7] 熊丹君, 蔡满意, 刘宇坤, 等. 多约束条件下飞行器航路规划 [J]. 弹箭与制导学报, 2009, 29(2): 289-292.
MethodsofRoutePlanningofUAVBasedonTaskDifferentiationOU
YANG Zhihong, LI Xiuhe
(Electronic Engineering Institute, Hefei 230037, China)
Operational task should been the basic factor on planning the UAV route, in order to presenting the dissimilar considerations between task accomplishment and safety. In this paper, the route planning problem were divided into fixed route planning and penetration route planning, and the points between the two were clarified. Then the planning methods were designed both, such as fixed route planning method based on task accomplishment degree, and penetration route planning method based on improved ant colony algorithm, which could satisfy the representative task requirements of UAV. Finally, the simulation results and the applications in operation simulation system showed that the route planning methods in this paper had both rationality and practicality.
UAV; task differentiation; fixed route planning; penetration route planning
V249.1
A
2016-04-16
武器装备重点预研基金;安徽省自然科学基金(1308085QF105)资助
欧阳志宏(1983-),男,河南确山人,讲师,硕士,研究方向:电子对抗作战仿真、复杂电磁环境构建。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
红领巾·探索(2020年5期)2020-05-19
火力与指挥控制(2020年2期)2020-04-02
电子技术与软件工程(2020年7期)2020-02-05
弹道学报(2019年4期)2020-01-10
现代计算机(2019年19期)2019-08-12
弹道学报(2018年4期)2019-01-05
金桥(2018年4期)2018-09-26
文理导航·科普童话(2015年6期)2015-07-29
