
基于3D激光雷达道路边缘实时检测算法的研究与实现
2017-11-01 17:14李强杜煜
计算机应用与软件 2017年10期
李 强 杜 煜
(北京联合大学信息学院 北京 100101)
基于3D激光雷达道路边缘实时检测算法的研究与实现
李 强 杜 煜*
(北京联合大学信息学院 北京 100101)
针对自然环境下无人驾驶车辆的道路边缘检测问题,提出一种基于3D激光雷达的实时道路边缘检测算法。对激光雷达的点云数据进行网格化处理,求出每个网格中的高度差,并针对道路边缘的高度特征,对网格数据进行阈值处理;再由近及远逐个提取左右道路边缘,利用最小二乘法对左右道路边缘网格进行曲线拟合平滑处理,得到左右道路边缘。实验结果表明,该道路边缘检测算法可靠性高,稳定性强,能够准确完成道路边缘检测,满足实时系统的要求。
无人驾驶 激光雷达 道路边缘 最小二乘法
0 引 言
环境感知是无人驾驶车(Unmanned ground vehicle)的重要研究内容[1-3],通过感知无人车所处环境的各种交通元素和障碍物信息,实现车辆的决策与控制。道路边缘检测是环境感知研究领域中的重要组成部分,道路边缘的确定为无人驾驶车隔离了可行驶道路区域和其他周边非可行驶道路区域。所以针对道路边缘检测算法的研究越来越受重视,但大部分的检测算法是基于视觉传感器[4-8]。由于视觉传感器的检测效果易受光照条件变化的影响,同时道路的复杂性也会影响视觉传感器的检测效果,例如道路边缘的多样性、道路边缘附近水迹、裂缝等,都会影响视觉传感器检测算法的稳定性。
激光雷达是一种高精度主动式环境探测传感器,在其有效探测范围内能够精确地探测环境中的物体位置信息。在可行驶道路和非可行驶道路之间会有明显的隔离区域,例如栅栏、墙体、花草、树木等,都可以作为道路边缘信息。因此,不少研究人员利用激光雷达的高精度和环境干扰性小的特点,对道路边缘特征进行提取,但是这些研究都是基于理论研究或者在理想道路上的直线道路边缘提取[9-10],或者是提取的道路边缘难以满足无人车的实时性要求[11-14]。本文提出的方法是在实际环境中采集的道路边缘,并在实际的无人车测试中取得较好的效果。
1 道路边缘提取
1.1 激光雷达
本文采用美国Velodyne公司HDL-64E激光雷达。假设建立一个球面坐标系以激光雷达为原点,激光雷达光束的俯仰角为球面坐标的仰角,激光雷达的旋转方向确定球面坐标的方位角。HDL-64E会产生64条激光线,每条光束都能够返回物体的距离信息r,而且每条光线的俯仰角θ是一个定值,激光雷达发射的光束打在物体表面的水平旋转角α可根据雷达的频率返回。根据球面坐标系,每个在探测范围内的物体的球面坐标都可以求出来,然后根据球坐标(r,θ,α)与直角坐标(x,y,z)之间的转换关系,可获得物体的直角坐标系。
1.2 道路模型
为了确保算法的通用性,本文选取了一段如图1所示的道路模型,而直线道路属于曲线道路的特殊情况。
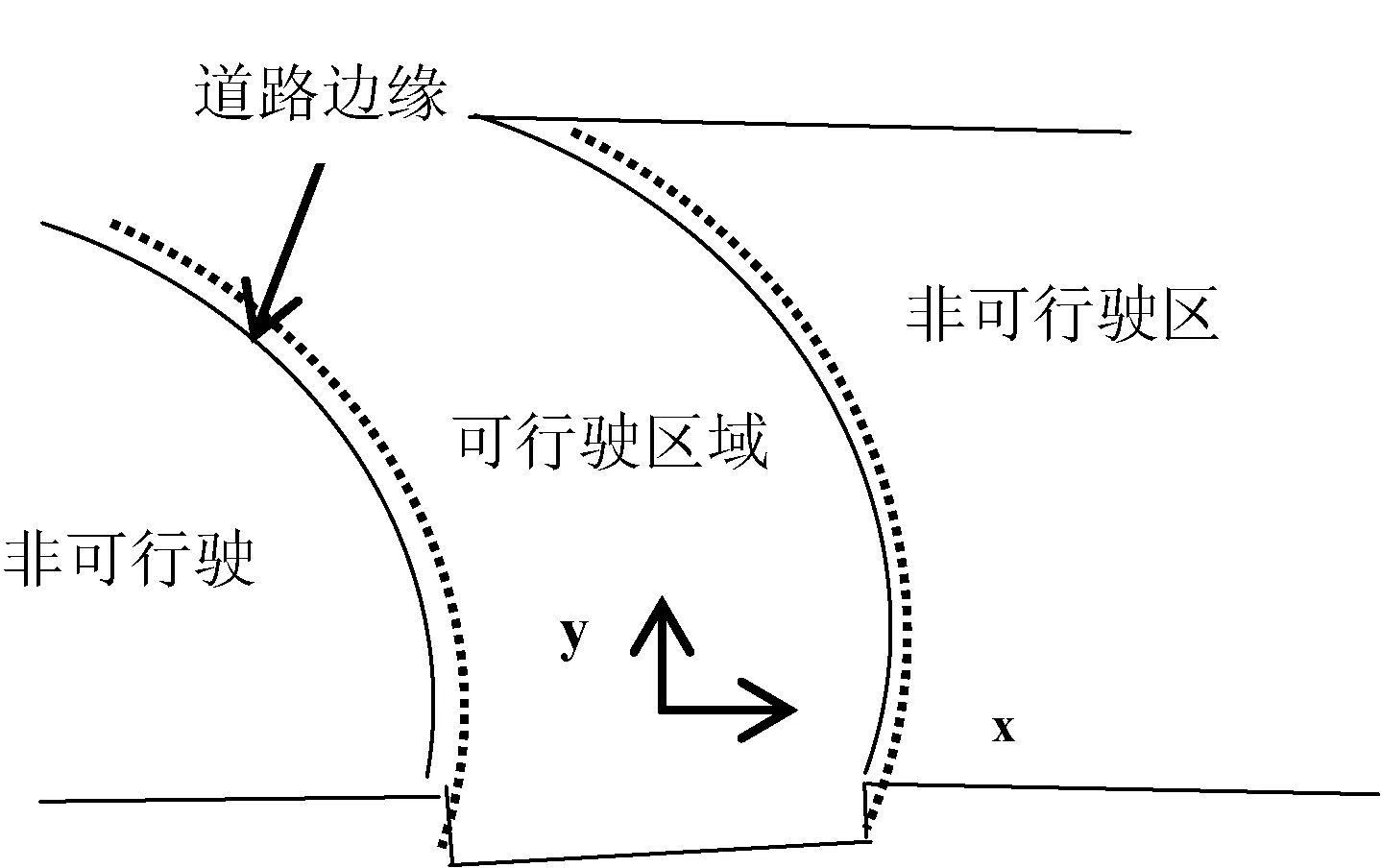
图1 道路模型图
1.3 提取激光雷达原始数据
从激光雷达获取原始数据为(r,θ,α),根据需要将球面坐标转换为直角坐标(x,y,z),转换关系如下:
x=r×sin(θ)×cos(α)
(1)
y=r×sin(θ)×sin(α)
(2)
z=r×cos(θ)
(3)
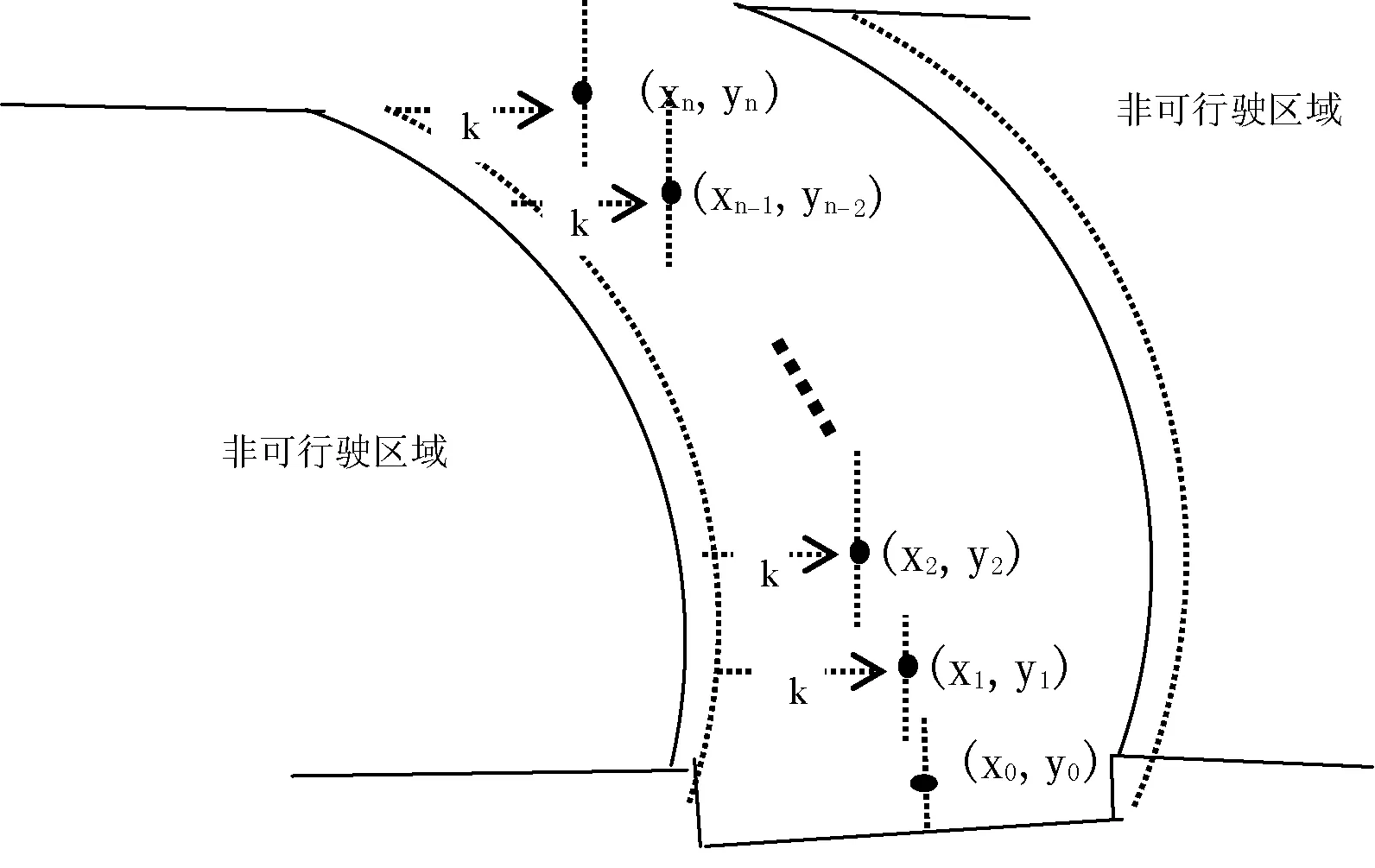
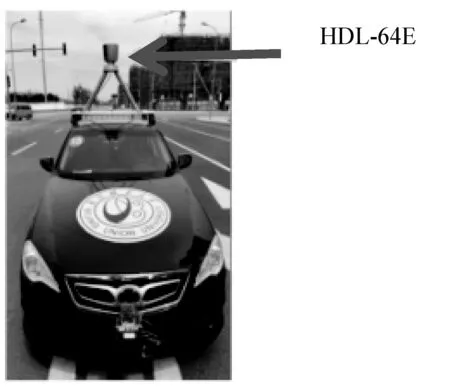
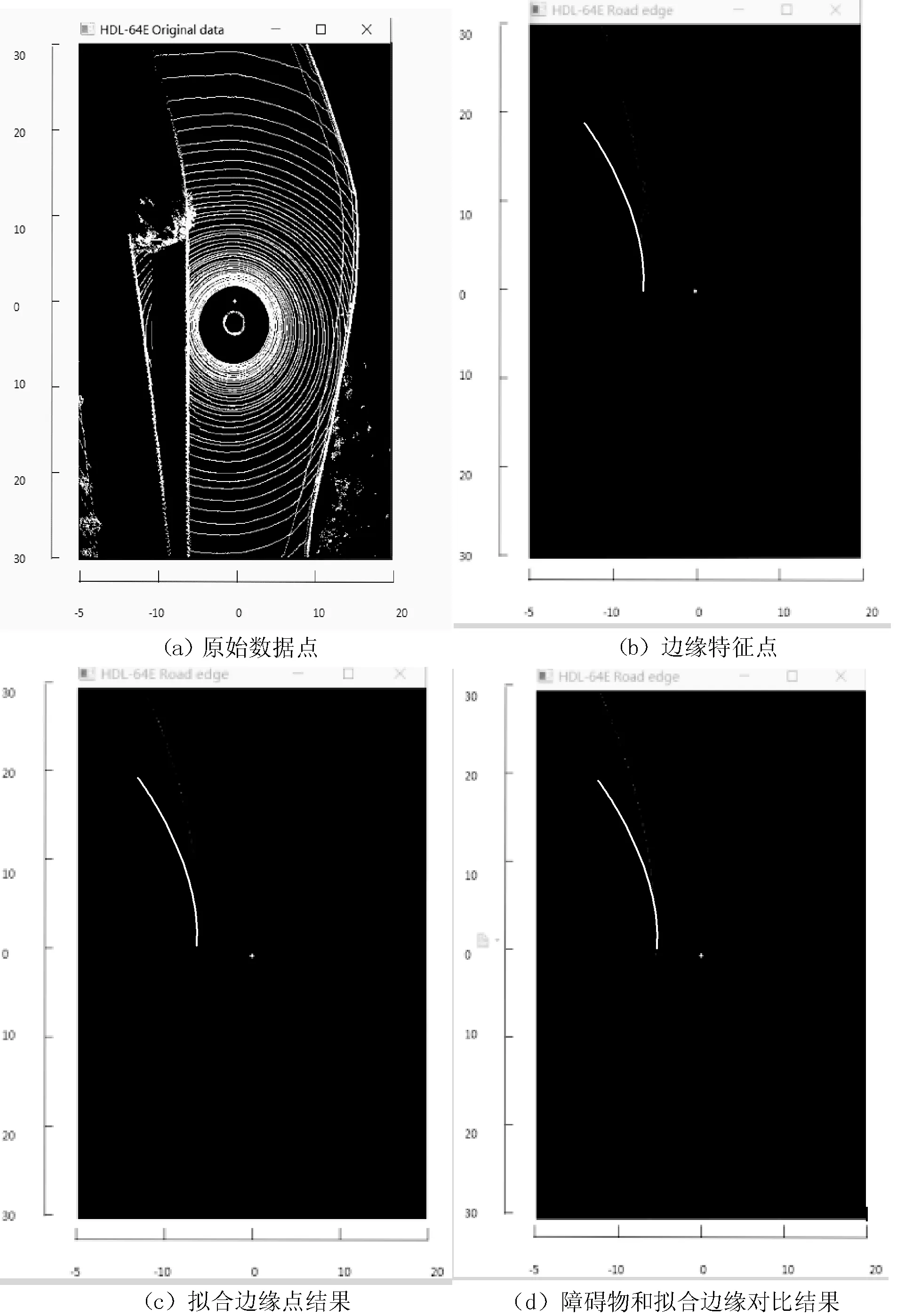
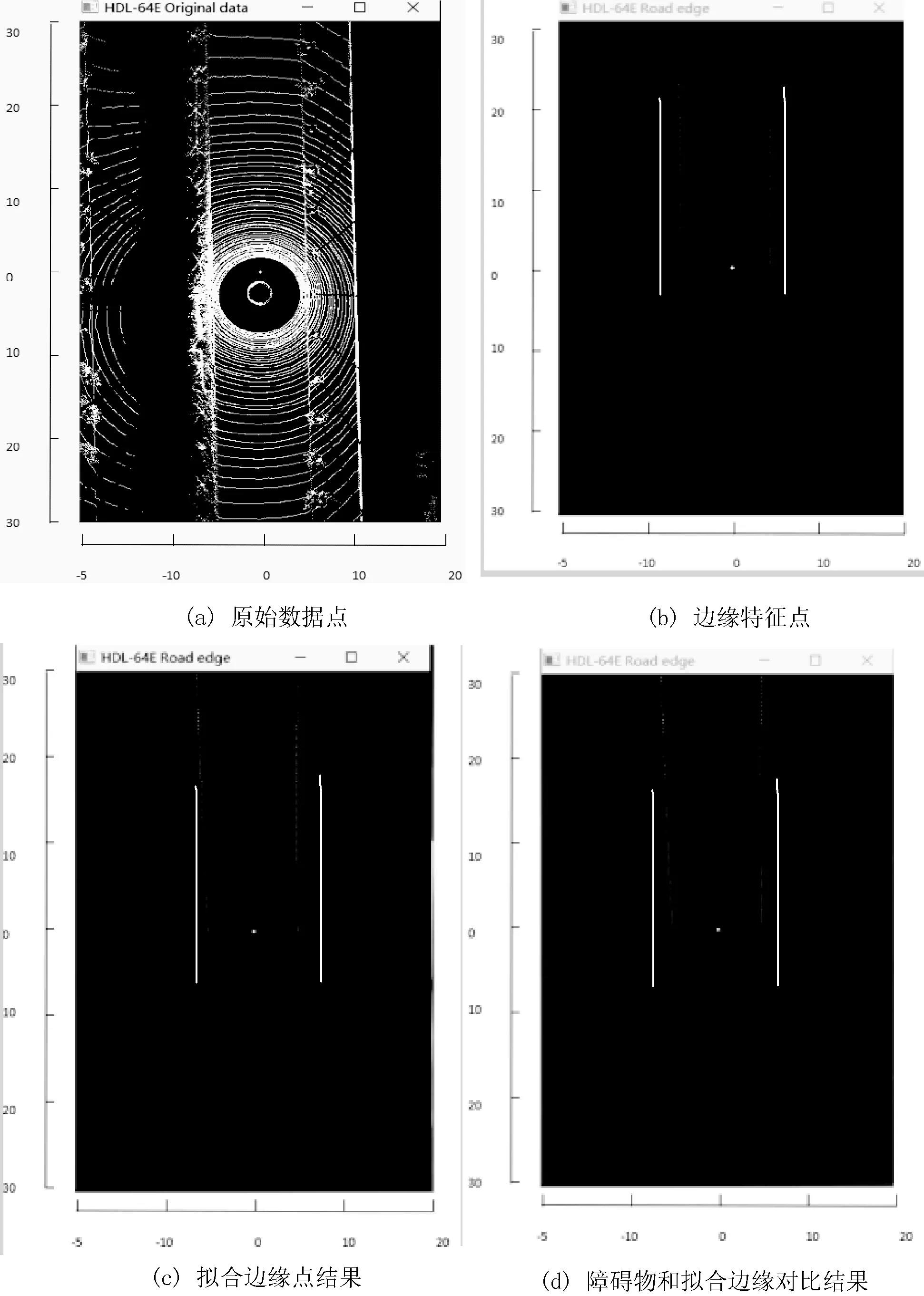
为了提高算法的效率,对原始数据进行感兴趣区域提取。本文限定感兴趣区域为车前50米,左右限定各10米,即0 m 障碍物都有一定的高度差,表现在原始数据中即为在xoy平面的一定区域内,z的数据会有较大的变化。根据这个特点对原始数据进行平面化处理,即将数据垂直投影到xoy平面,对该平面的原始数据进行20 cm×20 cm的网格化处理。以落在同一个网格的数据点作为一个处理单位,比较同一个网格内的所有数据点,找出其中最大Zmax和最小Zmin的数据点。这样每个网格都有一个高度属性Z=Zmax-Zmin。一般可行驶区域和非行驶区域都有一定的高度差,所以道路边缘的网格高度属性都会大于一定的值。设定道路边缘大于20 cm,这样可以对获取的数据进行Z方向的阈值滤波,减小了道路旁边低矮石子、小杂草等影响。 激光雷达每一帧数据都会返回周边环境的障碍物分布情况,所以只需要对每一帧数据进行数据提取即可,即激光雷达实时的扫描障碍物,算法则实时对道路边缘进行提取。假设无人驾驶车辆在道路中间,如果简单对x轴做一个正负方向的取值,然后判定它是左边道路边缘还是右边道路边缘,会误将左边道路边缘数据划分到右边道路边缘,也可能会将右边道路边缘数据划分到左侧道路边缘。因为在曲线道路情况下,两侧道路边缘都有可能同时出现x轴方向的数据为正和负的情况。所以需要针对曲线道路边缘进行合理的边缘点提取。 现在以提取左侧道路边缘为例进行说明,如图2所示。首先以车头(x0,y0)为起点,搜索起点前方一个网格(x0,y0+1)在x轴上左侧的最近点(x1,y1)。如果没有找到最近点,则继续在下一个网格(x0,y0+2)上面寻找左侧最近点,如果还没有找到,继续上一步操作。因为道路边缘一定存在,所以必然会找到最近点(x1,y1),将该点在x轴上平移k,其中k>0,得到点(x1-k,y1)。然后将起点改为(x1-k,y1),继续重复上一步骤,以此类推,将获取一系列点:(x1-k,y1),(x2-k,y2),(x3-k,y3),…,(xn-k,yn)。对这些点x轴上进行加k操作,即获得道路边缘特征点的数据点: (x1,y1),(x2,y2),(x3,y3),…,(xn,yn) (4) 图2 提取边缘特征点图 最小二乘法通过最小化误差的平方和寻找数据的最佳函数匹配,是一种常用的曲线拟合方法。假定待拟合数据点为(xi,yi),在确定的函数类Φ中,求p(x)Φ,使ri=p(xi)-yi(i=0,1,…,m)的平方和最小,即: (5) 在曲线拟合的过程中Φ可有不同的选取方法,根据给定的道路边缘模型,选取二次函数作为最佳拟合曲线。如果道路比较曲折,可以选取三次函数或更高次函数作为最佳拟合曲线,在这里以一般性道路边缘模型来阐述方法。假设二次最佳拟合曲线为: (6) 用矩阵表示最小二乘法的关系为: (7) 其中(xi,yi)为上述求得的曲线道路边缘特征点,m为特征点数据个数,a、b、c为曲线函数待解系数。可以证明,式(7)中的三阶矩阵为对称正定矩阵,故存在唯一解,即可以解出a、b、c。当a=0时,即为直线道路边缘的情况。 实验无人车平台如图3所示,本测试无人车型号为北汽C70。两次代表北京联合大学参加“智能车未来挑战赛”,在2014年参赛时获得综合成绩排名第三。HDL-64E在无人驾驶车辆上的安装如图3所示,激光雷达安装距离车头2.67 m处,并且雷达要求处于水平状态。本文选取直角坐标系对数据进行处理,其中原点o为激光雷达的位置,y轴为车向前行驶方向,x轴为平行于地面,方向为从驾驶位到副驾驶位。z为垂直于地面向上的方向。 图3 实验平台 实验场景一如图4所示。该场景为一段曲率较大、边缘平滑的道路,部分道路边缘被遮挡。由于之前对数据进行了感兴趣区域提取,该场景下的右侧道路边缘距离自身车道较远,所以不予考虑。 图4 实验场景一 实验场景一的激光雷达点云数据如图5(a)所示,图中白点为实验车车头位置。对点云数据提取边缘特征点,如(b)所示。用最小二乘法对点云数据进行拟合如(c)所示。拟合效果和障碍物分布图如(d)所示。该场景下的右侧道路边缘在本文提取的感兴趣区域之外,所以不予考虑。可以看出提取的马路边缘和实际马路边缘是相符合的。 图5 实验情况一(单位:米) 实验二选取的场景如图6所示,该场景为一段近似直线路段,该路段马路边缘旁有树木和花草。 图6 实验场景二 实验场景二的激光雷达点云数据如图7(a)所示,图中白点为试验车车头位置。对点云数据提取边缘特征点,如(b)所示。用最小二乘法对点云数据进行拟合如(c)所示。拟合效果图和障碍物分布图如(d)所示。左右边缘都在感兴趣区域内,所以左右边缘都在无人车的感知范围内,提取到的马路边缘也与实际情况相符。 图7 实验情况二 文中通过马路边缘的特征,提出了一种基于激光雷达的马路边缘提取拟合的方法。首先对激光雷达扫描区域进行感兴趣区域提取,然后利用障碍物和地面有一定高度差的特点,提取感兴趣区域内的障碍物。针对提取到的障碍物分布情况,利用本文方法提取马路边缘特征点,最后对特征点进行拟合处理。通过上述两个实验结果显示,在马路边缘为有规律的曲线,并且没有被大面积遮挡的情况下,本文方法可以很好地对马路边缘进行检测。 [1] 黄武陵.无人驾驶汽车带来的交通便利[J].单片机与嵌入式系统应用,2016,16(6):6-8. [2] 冯学强,张良旭,刘志宗.无人驾驶汽车的发展综述[J].山东工业技术,2015(5):51-51. [3] 王俊.无人驾驶车辆环境感知系统关键技术研究[D].中国科学技术大学,2016. [4] Bar-Shalom Y,Li X R,Kirubarajan T.Estimation with Applications to Tacking and Navigation[M]//Theory,Algorithms,and Software.Wiley,New York,2001. [5] Nationnal Semiconductor Corporation.RSDS “Intra-Panel” Interface Specification[Z].2003. [6] Zhang W,Sadekar V.Road-edge detection:US,US 8099213 B2[P].2012. [7] Wang H,Gong Y,Hou Y,et al.Road Detection Based on Image Boundary Prior[M]//Image and Graphics.Springer International Publishing,2015:212-222. [8] Chow J.Versatile RSDS-LVDS-miniLVDS-BLVDS differential signal interface circuit:US,US6836149[P].2004. [9] Yu C H.Road Curbs Detection Based on Laser Radar[J].Chinese Jorunal of Electon Devices,2008,31(3):757-762. [10] Han J Y,Kim D C,Minchae L,et al.Enhanced road boundary and obstale detection using a downward-looking lidar sensor[J].IEEE Transactions on Vehicular Technology,2012,61(3):971-985. [11] Duan J,Valentyna A.Road edge detection based on LIDAR laser[C]//International Conference on Control,Automation and Information Sciences.IEEE,2015. [12] Wang X,Cai Y,Shi T.Road edge detection based on improved RANSAC and 2D LIDAR Data[C]//International Conference on Control,Automation and Information Sciences.IEEE,2015. [13] Drage T,Churack T,Braunl T.LIDAR Road Edge Detection by Heuristic Evaluation of Many Linear Regressions[C]//IEEE,International Conference on Intelligent Transportation Systems.IEEE,2015. [14] Jaafari I E,Ansari M E,Koutti L.Fast edge-based stereo matching approach for road applications[J].Signal Image & Video Processing,2017,11(2):267-274. RESEARCHANDIMPLEMENTATIONOFREAL-TIMEROADEDGEDETECTIONALGORITHMBASEDON3DLIDAR Li Qiang Du Yu* (InstituteofInformation,BeijingUnionUniversity,Beijing100101,China) Aiming at the road edge detection problem of unmanned vehicle in natural environment, this paper proposes a real-time road edge detection algorithm based on 3D lidar. The point cloud data of lidar are meshed to get the height difference of each grid, and the threshold is processed according to the height characteristic of the road edge. Then one by one from the near to the far to extract the left and right road edge, and we use the least square method to curve fitting the left and right road edge mesh, and get the right and left edge of the road. The experimental results show that the algorithm has high reliability and stability, and can finish the road edge detection accurately. It can meet the requirements of real-time system. Unmanned driving Lidar Road edge Least square method TP3 A 10.3969/j.issn.1000-386x.2017.10.038 2016-12-06。国家自然科学基金重大研究计划项目(91420202)。李强,硕士,主研领域:基于激光雷达的路径规划算法,基于激光雷达的slam研究。杜煜,教授。1.4 网格化原始数据
1.5 提取障碍物边缘点
1.6 曲线拟合道路边缘
2 实验平台
3 实验结果与分析
3.1 实验一

3.2 实验二

4 结 语
猜你喜欢
北京测绘(2022年5期)2022-11-22
作文小学中年级(2022年9期)2022-09-08
汽车观察(2021年8期)2021-09-01
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
