
玉米花生间作播种施肥一体机研制与试验
2017-11-01 23:03耿端阳李玉环解春季徐海刚
农业工程学报 2017年17期
耿端阳,何 珂,印 祥,李玉环,姜 萌,解春季,徐海刚
玉米花生间作播种施肥一体机研制与试验
耿端阳1,何 珂1,印 祥1,李玉环1,姜 萌1,解春季1,徐海刚2
(1. 山东理工大学农业工程与食品科学学院,淄博255000;2. 时风集团农业部农机动力和收获机械重点实验室,聊城252000)
针对玉米花生间作播种经济效益高但缺少一体化作业机械装备的现实问题,采用农机农艺融合的研究方法,开发了1种1次作业可以实现旋耕筑垄、混土施肥、玉米花生间作播种和对行覆土镇压等功能的玉米花生间作播种施肥一体机,并对影响垄台筑建、沟床平整的旋耕装置和最小结构尺寸的平行四杆机构进行了设计;采用正交试验方法探究了旋耕刀轴转速、耕深和仿形机构拉杆长度对花生垄台高度和播深一致的影响规律,结果表明:在旋耕刀轴转速为260 r/min,耕深15 cm及仿形机构拉杆长度为24 cm时,即可为玉米花生间作创造良好的播种环境,且花生播深合格率达91.1%,玉米播深合格率达90.1%,其他参数完全符合相关农艺标准,为该农艺技术的推广应用提供可供选择的机械化装备。
播种;农业机械;试验;玉米-花生间作;正交试验
0 引 言
玉米花生间作种植作为可以发挥高秆与矮秆、直根系与须根系、需氮多和需磷钾多互补效应的增产增效农艺,受到了农学专家的长期关注[1-3],特别是不同地区采用不同的间作模式后,可以有效控制和缓解玉米花生种植争地抢时矛盾,实现两种作物高效生产,提高农作物生产的综合效益[4-7]。据山东省农科院连续7年的生产试验,玉米花生间作种植可实现“玉米基本不减产,花生多收三四百”的功效[8-9],对保障中国粮食安全,增加农民收益,实现农民增收具有重要的意义[10]。
青岛农业大学尚书旗教授等人按照中国北方花生播种的特点,研制的2BF4-4型花生覆膜播种机可一次性完成花生筑垄、播种和覆膜[11];中国农业大学李洪文教授研制的凹形圆盘式玉米播种机、水平拨草轮式玉米播种机等机型均已实现免耕条件下玉米播种,且其试验指标均达到国家标准[12-13]。就玉米花生间作播种而言,目前国内尚未见相关机型研究。故长期以来玉米花生间作技术一直处于手工作业或者分时独立种植模式[14-17]。本文以目前山东地区玉米花生种植农艺为基础开发了玉米花生间作播种机,可一次作业完成旋耕筑垄、混土施肥、玉米花生间作播种和对行镇压的功能。
1 玉米花生间作播种农艺的确定
通过长期的研究发现,玉米花生间作种植虽然可以增加农民收益,提高土地利用效率,均衡土壤肥力的综合利用[18-19],但是由于各地的种植习惯、土壤状况、作物品种等差异,导致该农艺在实施过程中复杂多样[20],后经山东省农科院万书波院长的长期研究,结果表明以玉米花生3:4(即玉米3行、花生4垄)的播种模式优势最为明显[21],如图1所示。

图1 玉米花生间作种植模式
该模式可有效改善玉米花生生长过程的通风、采光、防烂种、便排水等生长条件与问题,实现玉米花生的高效稳产。
2 玉米花生间作播种施肥一体机的结构和工作原理
2.1 整机结构
针对上述播种农艺要求,可将整机设计为非对称分布的4-3(一侧播种2垄4行花生,另一侧播种3行玉米)结构和对称分布2-3-2(中间播种3行玉米,两边各播种1垄2行花生)结构。对于第1种结构,为了满足花生起垄播种的要求,需要将玉米种床耕层土壤进行远距离输送,完成花生播种垄台的筑建,难度较大;采用第2种结构,将耕层土壤进行双边反向输送,当土壤输送至花生播种带后,分别起垄筑台,不仅缩短了土壤输送距离,而且起垄规整,玉米播种行地表平整,所以本机采用了第2种结构。整机具体结构如图2所示。

1.仿形架 2.施肥装置 3.划行器 4.连接板 5.机架 6.限深轮 7.翻土犁 8.旋耕起垄装置 9.玉米播种装置 10.花生播种装置
玉米花生间作播种施肥一体机主要由机架、限深轮、旋耕起垄装置、施肥装置、仿形架、花生播种装置、玉米播种装置及传动部分等组成。其中限深轮安装在机架横梁上;旋耕起垄装置安装在机架两侧板上,采用中间变速箱传动;施肥装置安装在旋耕装置上方,采用侧面链传动,外槽轮式排肥器排肥;仿形架安装在机架后方,采用四连杆仿形方式进行仿形;花生播种装置与玉米播种装置位于仿形架后方,播种装置由开沟器、种箱、排种器、镇压轮组成,如图3所示。该机能一次完成旋耕、混土施肥、玉米花生间作播种和覆土镇压,其技术参数如表1所示。

1.玉米行开沟器 2.玉米排种器 3.玉米行镇压轮 4.玉米种箱 5.花生种箱 6.花生排种器 7.花生行开沟器 8.花生行镇压轮
2.2 工作原理
玉米花生间作播种施肥一体机工作原理如下:工作时,由拖拉机动力输出轴驱动旋耕装置,对播前农田的秸秆、杂草等物进行粉碎混土,同时完成土壤的双边反向输送,构建适合花生播种的垄台、形成玉米播种种床。在此过程,肥料通过施肥装置施于旋耕装置前方,以便旋耕过程肥料与土壤的均匀混合,为播种创造良好的条件;仿形架后的玉米播种装置与花生播种装置完成玉米和花生的开沟播种;最后,覆土镇压装置对播种在垄沟内的玉米以及播种在垄台上的花生进行覆土镇压。

表1 玉米花生间作播种施肥一体机技术参数
3 玉米花生间作机的关键部件设计
3.1 旋耕起垄装置设计
3.1.1 旋耕深度确定
根据玉米花生的播种行宽,确定旋耕起垄装置的旋耕深度,实现玉米播种行的土壤向花生播种行的输送,形成花生播种所需要的垄台和玉米播种所需的平整床面,如图4所示。

注:h1为花生垄台高度,cm;h2为旋耕深度,cm;a为花生垄台上边长,cm;b为花生垄台下边长,cm;L表示2垄4行花生与3行玉米总幅宽,cm;α表示理论花生垄台斜面与地面间夹角,(°)。
由图4所示几何关系可得方程组

式中1为花生播种行断面面积,cm2;2为玉米播种行断面面积。
为了实现花生垄台规整筑建,使1=2,则有

简化计算可得式(3)

以山东地区玉米花生种植农艺为例,分别为50,85,330 cm,1一般为5~8 cm,代入式(3)得:12 cm<2<18 cm。
由于旋耕深度超过10 cm,选择旱地作业深耕的I型刀,其回转半径为245 mm。
3.1.2 旋耕刀轴转速确定
考虑旋耕作业主要是随着机组的前行,由旋耕刀对作业行土壤进行反复切削,所以耕层底部会形成一个接一个的凸起;而为了避免漏耕,必须严格控制该凸起的高度,设旋耕刀在0时刻的位置为1,在时刻旋耕刀的位置为2,则相邻两把刀走过的轨迹相交于点,从而3为耕层底部凸起的最大高度,如图5所示。旋耕装置的耕作深度为2,参照文献[22-24]可知,避免漏耕的条件为3≤0.22。
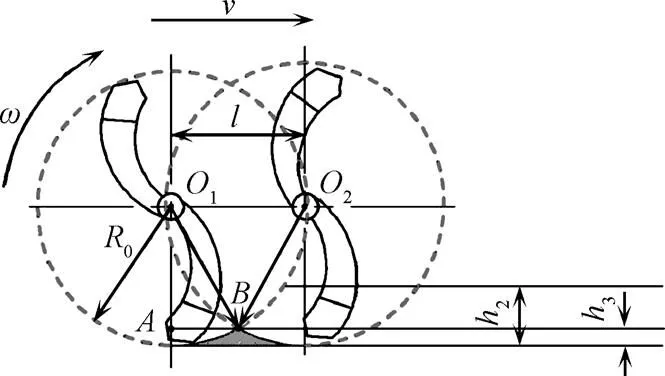
注:R0为I型旋耕刀半径,mm;ω为旋耕刀旋转角速度,r·min-1;l为0-t时刻机具前进距离,mm;B为相邻两刀切削土壤时交点;h3为旋耕刀形成凸起高度,cm;v为机器前进速度,m·s-1, A为辅助点。

式中0为I型旋耕刀半径,mm。
设旋耕起垄装置刀轴转速为,每个圆周方向安装2把刀,则旋耕刀每转一周完成2次土壤切削,形成一个耕层底部的凸起,所用的时间为

所以机器前进速度为

进而旋耕刀的转速为

考虑到旋耕刀转速过低很难满足作业要求,旋耕刀转速过高,导致功率消耗大幅增加,因此旋耕刀转速在满足旋耕要求时,取较小值。
3.1.3 旋耕刀排列设计
用于普通整地的旋耕机为了满足工作后耕面平整,旋耕刀均为螺旋线方向布置,且同一螺旋线上刀的旋向一致。由于本机旋耕装置需要满足“调土”功能,因此旋耕刀排列在遵循螺旋线规则时,需要改变旋耕刀旋向,以此对切碎的土壤产生侧向力,将切下的土壤向一边抛送,最终实现旋耕筑垄的功能。
为更好地实现旋耕和起垄,旋耕起垄装置采用全幅旋耕,旋耕刀共计96把,左右半轴各48把。旋耕刀旋向安排如下:在玉米播种行安装2对对称的旋刀,实现该区土壤的疏松、平整;在花生播种行,两边各设置一组7对对称的旋刀,实现花生播种区域土质的疏松和聚中;为了防止土壤外甩,最左侧布置2对左旋刀,最右侧布置2对右旋刀,实现土壤的向内输送;其他区域内布置能够实现土壤向花生种植区域输送的左旋刀或右旋刀(左侧左旋,右侧右旋),旋耕刀详细排列布置如图6所示。

注:横坐标2、4、6……代表第几对刀。
3.2 仿形机构结构的确定
3.2.1 仿形机构正常工作的条件
依据东北农业大学蒋恩臣教授的研究结果可知,耕层土壤对仿形轮的支反力(Q与Q)与整机重力、耕层对开沟器的阻力(R与R)、镇压轮工作阻力(F与F)以及仿形机构的牵引角有关[25],如图7所示。如果整机重力不变,则耕层对开沟器的阻力、镇压轮的工作阻力和牵引角越大,仿形轮受到的阻力越小;反之越大。显然,要保证开沟器的工作稳定,则要求仿形轮与耕层土壤有适当的接触压力,且工作过程仿形轮所受的阻力和牵引角变化越小,则该系统的工作越稳定。
3.2.2 仿形机构牵引角的确定
播种施肥一体机开始工作时,必须保证其开沟器具有较好的入土性能,所以其仿形机构的起始牵引角0应该处于水平线以上,一般取0=0~10°。本研究的玉米花生间作播种施肥一体机由于前部设有全幅旋耕装置以及具有整机重力大的特点,所以该机仿形机构起始牵引角0设为0。
为了保证播种施肥一体机稳定工作,则要尽量减少播种施肥一体机作业过程仿形机构牵引角的变化范围,即要么加长仿形机构的上下拉杆,要么选取合适的仿形机构牵引角。对于加长仿形机构的拉杆长度来说,必然出现机具纵向尺寸加大和整机重心的后移,虽然有利于保证播种施肥一体机工作的稳定性,但不利于本播种施肥一体机的纵向悬挂稳定性;对于仿形机构牵引角的选取,首先必须保证在起伏地表开沟深度的一致性,所以仿形机构牵引角变化范围最好处于对开沟深度变化较为敏感范围之内,一般≤45°[26-27],如图7所示。

注:Px,Py为牵引力;M为牵引力对机具上平行四杆机构在xy面上力矩;mg为机具的重力;Qx,Qy为耕层土壤对仿形轮的支反力;Rx,Ry为耕层对开沟器的阻力;Fx,Fy为镇压轮工作阻力;β为仿形机构的牵引角;β0为仿形机构起始牵引角;γ为仿形机构理论上摆动的最佳角度范围;O1,O2为仿形机构与机具连接点;B1,B2为仿形机构在初始位置时两点;A1,A2为仿形机构向上浮动最大时B1,B2所处的位置;C1,C2为仿形机构向下浮动最大时B1,B2所处的位置。
考虑播种施肥一体机工作过程的稳定性,最好将播种施肥一体机工作时的上下拉杆位置控制在水平位置附近。又考虑地表部平整度是双向的,有可能上凸、下凹,即仿形机构可能出现上、下仿形。参照国内外播种施肥一体机机型,依据本论文播种施肥一体机特点,设计上下仿形角各为22.5°,又因为起始仿形角0设计为0°,故本机仿形机构牵引角为−22.5°~22.5°。
3.2.3 拉杆长度的确定
如前文所述确定仿形机构的起始牵引角和牵引角,由于0=0°,上下仿形量又相等,故通过一侧仿形量即可计算拉杆长度′,如图8所示。

式中4是单向仿形时仿形深度,mm;′是单向仿形时牵引角,即22.5°。
一般播种施肥一体机的单向仿形量为80~100 mm,而本机单向牵引角为22.5°,故拉杆的长度为209~261 mm。

注:h4是单向仿形时仿形深度,cm;β′是单向仿形时牵引角,22.5°;DF为辅助水平线,E为仿形机构向下浮动最大时,拉杆与水平线交点,此时O1E即为所求拉杆长度。
4 试验设计与数据分析
4.1 正交试验
为了验证前文理论分析的正确性,进行了其主要结构参数对该型播种施肥一体机作业性能的影响试验。选择旋耕刀转速、耕深2和拉杆长度为试验因素,选择播种深度和花生垄高的合格率为试验指标,进行了三因素四水平的正交试验,寻求试验因素影响播种深度和花生垄高因素的主次关系,确定较优组合。
试验时,旋耕刀转速通过改变变速箱推杆位置来实现传动比的调控,旋耕深度通过调节限深轮位置改变,拉杆长度通过改变拉杆上销位置调节。
4.1.1 试验条件和试验装置
试验时间:2016年5月
试验地点:德州市庆云县庆云颐园农机制造有限公司试验田
试验对象:鲁单818与花育22号
试验指标:选取播种深度合格率和花生垄台高度合格率为试验考察指标。
试验装置:玉米-花生间作播种施肥一体机

图9 玉米-花生间作播种施肥一体机
试验方法:在玉米-花生间作播种施肥一体机速度为3 km/h的作业条件下进行试验,随机选取3段作业长度作为测试小区,小区长度为30 m,以小区播种行内花生、玉米播种处作为测点,测量花生测点处垄台高度,垄台高度介于5~8 cm内,标记为合格点。然后按式(9)计算花生垄台高度合格率;在花生、玉米测点上,垂直切开土层,测定种子的覆土层厚度,花生覆土层厚度介于2.5~3.5 cm内,标记为花生播深合格点,玉米覆土层厚度介于2~4 cm内,标记为玉米播深合格点,随后按式(10)分别计算播种深度合格率。
1)垄台高度合格率

式中1为垄台高度合格率,%;d为测点高度合格点数;0为测点总点数,取值为20。
2)播种深度合格率

4.1.2 试验方案与结果
为了验证上述理论分析,寻求较优的参数组合,对所选3个参数进行了三因素四水平的正交试验,参数水平如下表2所示,其结果如表3所示。

表2 试验因素与水平
4.2 试验结果与分析
4.2.1 极差分析
由表3可知,各考察因子的极差越大,说明该因子对试验指标的影响越大。这样确定了垄台高度合格率、花生播深合格率和玉米播深合格率影响因素的主次关系如表4所示。

表3 试验方案与结果

表4 试验指标分析
4.2.2 方差分析
根据表3可以得出试验指标的方差分析、值及其显著性,结果如表5所示。

表5 试验指标方差分析
注:F为检验统计量,**代表试验因素在0.01显著性水平下显著。
Note: F is test statistics, ** represents test factor is outstanding under the 0.01 significance level.
综合极差和方差分析可知,旋耕刀轴转速、耕深、拉杆长度对垄台高度合格率、花生播深合格率、玉米播深合格率的影响显著性不同,如表5所示。由方差分析结果可知,旋耕刀轴转速对垄台高度合格率有极显著影响,拉杆长度对花生播深合格率与玉米播深合格率有极显著影响。
旋耕刀轴转速对垄台高度合格率有极显著影响。旋耕刀转速越快,旋耕刀的土壤转移量会增加,但是当转速过快时,旋耕刀对土壤的甩动作用过强,土壤不能有效集中在花生起垄区,从而导致垄台高度合格率降低;而当旋耕刀转速过低时,由于没有足够的土壤构建垄台,所以垄台高度合格率也会偏低;试验结果可知,在旋耕刀转速为260 r/min时,垄台高度最为稳定,垄台高度合格率最佳,满足花生垄播的农艺要求。
耕深对垄台高度合格率有一定影响,当耕深过浅时,土壤转移量不能有效筑建垄台;当耕深过深时,土壤转移量增加,垄台平均高度增高,垄台高度合格率降低。
拉杆长度对花生播深和玉米播深有极显著影响。在仿形量一致的前提下,拉杆越长仿形机构牵引角越小,纵向稳定性越差,此时土地对机器的支反力越大,仿形机构下陷导致开沟过深;拉杆越短,土地对机器的支反力越小,此时开沟器开沟入土性能不佳,工作不稳定。试验发现拉杆过长或者过短都将影响花生和玉米播种合格率。
通过极差与方差试验数据分析,综合各试验因素对试验指标的影响主次关系及其优化组合,按照垄台高度合格率、花生播深合格率和玉米播深合格率较高的原则选取较优试验因素,最终确定较优组合为233,此时旋耕刀轴转速260 r/min,耕深15 cm,拉杆长度24 cm,在该条件下垄台高度合格率为92.0%,花生播深合格率为91.1%,玉米播深合格率为90.1%。
5 结 论
1)依据玉米花生间作播种农艺,开发了与其适应的玉米花生间作播种施肥一体机,实现了农机农艺的有效融合,为玉米花生间作播种施肥一体机械化水平的提高奠定了基础。
2)该机一次作业可以实现旋耕、花生垄台筑建、玉米播种沟床平整、施肥、开沟、播种、覆土和镇压的复合性功能,有效提高了作业效率。
3)通过正交试验验证了研究结果的正确性,确定了主要参数的较优组合,且在旋耕刀轴转速260 r/min,耕深15 cm及仿形机构上拉杆长度为24 cm时,即可为玉米花生间作创造良好的播种环境,且花生播深合格率达91.1%,玉米播深合格率达90.1%,完全满足玉米花生间作播种的农艺要求。
[1] 万书波. 我国花生产业面临的机遇与科技发展战略[J]. 中国农业科技导报,2009(1):7-12.
Wan Shubo. Opportunities facing peanut industry in China and strategies for its science and technology development[J]. Journal of Agricultural Science and Technology, 2009(1): 7-12. (in Chinese with English abstract)
[2] 焦念元. 玉米花生间作复合群体中氮磷吸收利用特征与种间效应的研究[D]. 泰安:山东农业大学,2006.
Jiao Nianyuan. Studies on the Characters of N&P Utilization and Interspecific Interaction in the Maize//Peanut Inthercropping[D]. Taian: Shandong University of Science and Technology, 2006. (in Chinese with English abstract)
[3] Tran-Dinh N, Kennedy I, Bui T, et al. Survey of vietnamese peanuts, corn and soil for the presence of aspergillus flavus and aspergillus parasiticus[J]. Mycopathologia, 2009, 1685(5): 257-268.
[4] 郭笑彤. 玉米/花生间作改善花生铁营养的分子生态调控机制[D]. 北京:中国农业大学,2014.
Guo Xiaotong. The Molecular and Ecological Regulation Mechanism in Improving Peanut Iron Nutrition by Maize/Peanut Inthercropping System[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[5] Karayel D. Performance of a modified precision vacuum seeder for no-till sowing of maize and soybean[J]. Soil and Tillage Research, 2009, 104(1): 121-125.
[6] Anan Polthanee, Vidhaya Trelo-ges. Growth, yield and land use efficiency of corn and legumes grown under intercropping systems[J]. Plant Production Science, 2004, 6(2): 139-146.
[7] Fonseca Homero. Sampling plan for the analysis of aflatoxin in peanuts and corn: an update[J]. Brazilian Journal of Microbiology, 2002, 33(2): 97-105.
[8] 李美,孙智明,李朦朦,等. 不同比例玉米花生间作对花生生长及产量品质的影响[J]. 核农学报,2013(3):391-397.
Li Mei, Sun Zhiming, Li Mengmeng, et al. Effect of maize-peanut intercropping on peanut growth, yield and quality[J]. Journal of Nuclear Agriculyural Sciences, 2013(3): 391-397. (in Chinese with English abstract)
[9] 夏海勇,孟维伟,于丽敏,等. 玉米花生间作在山东地区推广的现状与对策[J]. 山东农业科学,2015(3):121-124.
Xia Haiyong, Meng Weiwei, Yu Minli, et al. Present status and countermeasures for popularization of peanut-maize intercropping in shandong province[J]. Shandong Agricultural Sciences, 2015(3): 121-124. (in Chinese with English abstract)
[10] 原小燕,李根泽,林安松,等. 间作模式及氮、磷肥对玉米:花生间作体系产量和经济效益的影响[J]. 花生学报,2015(4):13-20.
Yuan Xiaoyan, Li Genze, Lin Ansong, et al. Effect of intercropping pattern, nitrogen and phosphorous on population yield and economic output under maize-peanut intercropping system[J]. Journal of Peanut Science, 2015(4): 13-20. (in Chinese with English abstract)
[11] 徐祝欣,田立忠,尚书旗,等. 2BFD-4型花生覆膜播种机的设计与试验[J]. 农业工程学报,2012,28(增刊2):13-17.
Xu Zhuxin, Tian Lizhong, Shang Shuqi, et al. Design and experiment of 2BFD-4 type peanut membrane planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.2): 13-17. (in English with Chinese abstract)
[12] 王庆杰,李洪文,何进,等. 凹形圆盘式玉米垄作免耕播种机的设计与试验[J]. 农业工程学报,2011,27(7):117-122.
Wang Qingjie, Li Hongwen, He Jin, et al. Design and experiment on concave disc type maize ridge-till and no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 117-122. (in English with Chinese abstract)
[13] 张喜瑞,何进,李洪文,等. 水平拨草轮式玉米免耕播种机设计和试验[J]. 农业机械学报,2010,41(12):39-43.
Zhang Xirui, He Jin, Li Hongwen, et al. Design and experiment on no-till planter in horizontal residue-throw finger-wheel type for maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 39-43. (in English with Chinese abstract)
[14] 尚书旗,刘曙光,王方艳,等. 花生生产机械的研究现状与进展分析[J]. 农业机械学报,2005,36(3):143-147.
Shang Shuqi, Liu Shuguang, Wang Fangyan, et al. Current situation and development of peanut production machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(3): 143-147. (in English with Chinese abstract)
[15] 胡志超,陈有庆,王海鸥,等. 我国花生田间机械化生产技术路线[J]. 中国农机化,2011(4):32-37.
Hu Zhichao, Chen Youqing, Wang Haiou, et al. Mechanization technical route for peanut production of China[J]. Chinese Agricultural Mechanization, 2011(4): 32-37. (in English with Chinese abstract)
[16] 胡志超,王海鸥,彭宝良,等. 国内外花生收获机械化现状与发展[J]. 中国农机化,2006(5):40-43.
Hu Zhichao, Wang Haiou, Peng Baoliang, et al. Status and development of peanut harvesting mechanization at home and abbroad[J]. Chinese Agriculyural Mechanization, 2006(5): 40-43. (in English with Chinese abstract)
[17] 胡志超,王海鸥,胡良龙. 我国花生生产机械化技术[J]. 农机化研究,2010(4):240-243.
Hu Zhichao, Wang Haiou, Hu Lianglong. Technologies of peanut production mechanization in China[J]. Journal of Agricultural Mechanization Research, 2010(4): 240-243. (in English with Chinese abstract)
[18] 何志刚,汪仁,王秀娟,等. 不同玉米/花生间作模式对土壤微生物量及产量的影响[J]. 中国农学通报,2013(33):233-236.
He Zhigang, Wang Ren, Wang Xiujuan, et al. The impact of intercropping on the yield and soil microorganism of different peanut and corn[J]. Chinese Agricultural Science Bulletin, 2013(33): 233-236. (in English with Chinese abstract)
[19] 夏海勇,丁照华,董希文,等. 都市近郊中低产田鲜食玉米/花生间作模式研究[J]. 山东农业科学,2016(6):54-57.
Xia Haiyong, Ding Zhaohua, Dong Xiwen, et al. Study on intercropping patterns of fresh corn with peanut in middle-and low-yielding fields of suburban areas[J]. Shandong Agricultural Scinences, 2016(6): 54-57. (in English with Chinese abstract)
[20] 王彦飞,曹国璠. 不同间作模式对玉米及花生氮磷钾分配的影响[J]. 贵州农业科学,2011,39(1):79-82.
Wang Yanfei, Cao Guofan. Effect of different intercropping pattern on N, P and K distribution in maize and peanut[J]. Guizhou Agricultural Sciences, 2011, 39(1): 79-82. (in English with Chinese abstract)
[21] 佚名. 山东省农科院玉米/花生宽幅间作实现粮油均衡增产[J]. 食品工业,2016(10):117-117.
[22] 方会敏,姬长英,Farman Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28.
Fang Huimin, Ji Changying, Farman Ali Chandio, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in English with Chinese abstract)
[23] 中国农业机械化科学研究院.农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007.
[24] 车刚,张伟,万霖,等. 基于灭茬圆盘驱动旋耕刀多功能耕整机设计与试验[J]. 农业工程学报,2012,28(20):34-40.Che Gang, Zhang Wei, Wan Lin, et al. Design and experiment of muctifunctional tillage machine with driven bent blade by stubble ploughing disk[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 34-40. (in English with Chinese abstract)
[25] 赵淑红,蒋恩臣,闫以勋,等. 小麦播种机开沟器双向平行四杆仿形机构的设计及运动仿真[J]. 农业工程学报,2013,29(14):26-32.
Zhao Shuhong, Jiang Enchen, Yan Yixun, et al. Design and motion simulation of opener with bidirectional parallelogram linkage profiling mechanism on wheat seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(14): 26-32. (in English with Chinese abstract)
[26] 蒋金琳,龚丽农,王明福. 免耕播种机单体工作性能试验研究[J]. 农业工程学报,2000,16(5):64-66.
Jiang Jinlin, Gong Linong, Wang Mingfu. Study on the working performance of the no-tillage planter unit[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(5): 64-66. (in Chinese with English abstract)
[27] 胡鸿烈,孙福辉. 单体仿形压轮式播种单组的设计与试验研究[J]. 农业机械学报,1996,27(增刊1):53-57. Hu Honglie, Sun Fuhui. Study on designing and testing of the drill unit with individual profiling press wheel[J]. Transactions of the Chinese Society for Agricultural Machinery, 1996, 27(Supp.1): 53-57. (in Chinese with English abstract)
Design and test of corn-peanut intercropping seeding-fertilizing machine
Geng Duanyang1, He Ke1,Yin Xiang1, Li Yuhuan1, Jiang Meng1, Xie Chunji1, Xu Haigang2
(1.,,255000,; 2.,,252000,)
In China, corn is one of the most important grain crop and fodder crop, in the meantime peanut is one of the most crucial cash crop. Both crops are widely planted in areas such as North China Plain. After a series of statistical analysis research, many agricultural experts and university scholars founded that the corn which is a typical fibrous root system crop needs large amounts of nitrogen rather than phosphorus and potassium and peanut which is a typical straight root system crop needs large amounts of phosphorus and potassium rather than nitrogen. When the two crops are planted in the same field, corn and peanut can produce complementary effect of microelement. Because of the complementary effect, both the yield and quality of corn and peanut will be also obviously improved. According to agronomy experts’ research report, when corn is planted in three rows and peanuts are planted in four rows, the corn and peanut will achieve the best growth status. Under this circumstances, corn-peanut intercropping system is proposed. Corn-peanut intercropping system which will effectively control and relieve the competition of corn and peanut can realize the high production of both crops. But due to the disconnection of agricultural machinery and agronomy technology, the corn-peanut intercropping technology is always at manual work stage or independent seeding stage and meanwhile there is no machine that can simultaneously sow two seeds. At the present stage, corn seeder and peanut seeder are relatively perfect, however, the corn-peanut intercropping seeder is still in blank. So the corn-peanut intercropping seeder which can relieve manual work attracts some experts and scholars to study. According to above practical problems, a simple and efficient corn-peanut intercropping seeder was designed which could simultaneously sow both corn and peanut seed. It might realize rotary tillage, ridge construction, fertilizer mixing with soil, soil covering and compacting when the machine was working. The laws between the main structural parameters and working parameters were studied, and the main parameters influenced the seeding performance were determined by the orthogonal test, including the spindle rotary speed, the depth of the rotary and the upper parallelogram linkage length. The rotary tillage device and the minimum structure of parallelogram linkage were studied, and the relevant theory was established. Experimental results showed the optimal condition was that: the spindle rotary speed 260 r/min、the depth of the rotary 15 cm、the length of parallelogram linkage is 24 cm. The corresponding performance indexes are as following: the qualified rate of sowing depth is 91.1% for peanut and 90.1% for maize ,which could completely meet the requirement of the designation. The research provides a reference for further improving quality and optimizing the parameter for corn-peanut intercropping seeder device and the machine provides a choice for those farmers who use corn-peanut intercropping system.
seeding; agricultural machinery; experiments; corn-peanut intercropping; orthogonal test
10.11975/j.issn.1002-6819.2017.17.005
S222.3
A
1002-6819(2017)-17-0034-08
2016-11-22
2017-08-17
山东省科技计划项目支持(2014GNC112004);省现代农业产业技术体系创新团队项目(NGJJ201502)
耿端阳,陕西澄城人,教授,博士生导师,主要从事新型农业机械装备开发研究。淄博 山东理工大学农业工程与食品科学学院,255000。Email:dygxt@sdut.edu.cn
猜你喜欢
经济林研究(2022年4期)2023-01-12
北方果树(2022年1期)2022-01-21
河北果树(2020年4期)2020-11-26
潍坊学院学报(2020年6期)2020-11-22
农机化研究(2019年1期)2019-12-21
中国测试(2018年10期)2018-11-17
农机化研究(2018年8期)2018-07-10
浙江大学学报(农业与生命科学版)(2017年1期)2017-04-17
中国农业文摘-农业工程(2016年5期)2016-04-12
振动、测试与诊断(2014年4期)2014-03-01
- 农业工程学报的其它文章
- 无线遥控步行插秧机的设计与试验
- 网链式花生地残膜回收机设计与试验
- 差速水稻钵苗Z字形宽窄行移栽机构设计
- Design and evaluation of PID electronic control system for seed meters for maize precision planting
- Design and test of semi-feeding test-bed for peanut pod picking
- Relationship between frequency spectrum characteristics and vibration responses of Ginkgo biloba trees during mechanical harvesting operation