无人机航摄与实景建模技术在工程中的应用研究
2017-11-02 15:27樊军片笑
城市地理 2017年9期
关键词:方案设计
樊军 片笑


摘要:行业的发展促进技术的进步,技术的进步又不断革新行业的生产方式。无人机技术的发展及民业应用化,使得工程建设中,地理数据的采集越来越快速、高效,多维度、全方位的信息采集模式也促进了在高精度的基础上多样化的数据成果形式。本文针对当前民用小型无人机所开展的摄影测量及其数据成果的工程应用,从航线设计、镜头选择、质量控制、像控测量及影像摄影测量处理等方面结合常见的几类工程外业实际进行了方案阐述,分析了各类型项目特点,综合数据质量和作业效率等关键因素提出了建议。
关键词:元人机;实景建模;方案设计
引言:现代社会中,遥感技术已成为人类获取地理环境及其变化信息的必备高科技手段,而随着无人机技术的发展,其成为了遥感技术的有效补充,小型无人机不仅在飞控软件、续航时间、飞行品质上有了明显的突破,其还具备体型小携带便捷、作业机动、高分辨率影像、高密度测量数据等优势,具备数据质量和作业效率两重重要因素,也由此成为近几年新兴的工程建设外业数据采集的优选手段。
无人机技术优化所带动的数据采集质量的提高,另一方面也为数据成果的多样化提供了可能,现代计算机技术的发展也使得计算机得以提供强大的运算能力等的支持,在这样的条件下,基于计算机视觉算法和计算机几何算法的实景建模技术实现了无人机数据的三维信息化,这是工程领域基础数据从形式到内容的革新,也为更优质的工程建设提供了扎实的基础。
随着无人机及实景建模技术的成熟和工业化应用,在测绘地理信息、BIM应用、水利电力工程建设、铁路、公路带状选线工程等诸多领域发挥了积极作用。技术的进步往往等价于解放生产力,本文根据对几种主流小型无人机的作业特点、主要参数、技术规格等的实践总结,结合具体工程实际的侧重点,做出了针对性的方案建议,在很大程度上实现了作业质量与作业效率的最优结合,使得技术更好的落脚于工程实践。
1无人机、实景建模技术介绍
1.1无人机技术
无人机(unmarmedaerialvehicle,UAV)是一种机上无人驾驶的航空器,其具有动力装置和导航模块,在一定范围内靠无线电遥控设备或计算机预编程序自主控制飞行。无人机的技术组成包括无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技術、Dos定位定姿技术、GPS差分定位技术和遥感应用技术等。
本文所提到几种无人机,主要针对常见的工程建设,综合安全与作业需求考虑,包括电动单镜头固定翼、电动双镜头固定翼、电动五镜头旋翼,基本上涵盖了大部分的工程应用。
1.2实景建模技术
实景建模技术广义来讲指以照片数据作为基础数据,通过影像预处理、区域网联合平差、空中三角测量、像点匹配、DSM点云生成、TIN构建、纹理映射等技术处理,生成逼近真实场景的高分辨率三维模型。综合性能各方面指标本文选择在实景建模软件领域处于领先地位的ContextCapture软件进行实景建模。
2工程作业条件分析及方案设计
实景模型由无人机数据解算而来,在不同的工程建设中,对实景模型质量要求的侧重各有不同,这也就对无人机的不同技术参数提出了着重要求。为满足工程质量要求,为高效作业,本文针对项目侧重点的不同设计了技术参数侧重不同的无人机及相关作业方案。
2.1工程作业条件分析
无人机数据质量决定着实景模型质量是否满足工程建设需求。追根溯源,控制无人机数据质量显得尤为重要。无人机数据质量主要由两方面的因素决定,一是内因,包括无人机飞控、pos、差分等硬性参数,取决于我们所选择无人机类型;二是外因,包括地形条件、大气状况、障碍物,以及无人机航高、旁向、航向重叠度等的设置。
在影响无人机数据质量的主要因素中,工程建设地点的地形条件、障碍物状况等是无法选择的,因此方案设计以此为分类依据:
1.地形等级低、离市区等空域干扰单位远、作业面积较大。
2.地形等级中等、离市区等空域干扰单位近、作业面积较大。
3.在市区,机场等空域干扰因素较近、作业面积较小。
2.2方案设计
首先针对地形等级低、离市区等空域干扰单位远、作业面积较大此类的航测项目。
其特点主要在于地形起伏较缓,无高大建筑且低矮建筑较为稀疏,作业面积较大。根据空中三角测量的解算特点,其连接点较少,需要较多的控制点提高坐标高程精度。旋翼五镜头虽侧面纹理丰富但无差分配置在该环境下难以发挥其优势,固定翼无人机配置两镜头及PPK差分技术,在满足纹理要求的同时,利用PPK差分技术保证大面积作业的数据精度,在确保数据质量的同时也提升了作业效率。
其次针对地形等级中等、离市区等空域干扰单位近、作业面积较大此类的航测项目。
其特点主要在于地形起伏较大或村庄较密集,作业面积较大。对于建筑密集区域,采用旋翼五镜头结合像控点布置的方案,在控制作业困难的地区可敷设构架航线:针对地形起伏较大的山区等区域,首先模型坐标高程精度差于平原地区,此外像控点也布置困难,需采用RTK或PPK差分技术才能保证较好的高程精度,而现有旋翼无人机基本上无差分配置,因此为保证数据精度及照片重叠度,采用带差分固定翼井字飞行,布置部分像控点,在保证数据精度的同时保证模型结构。
最后针对在市区,机场等空域干扰因素较近、作业面积较小此类的航测项目。
其特点主要在于建筑密集,高大建筑、信号塔、飞行管制等障碍较多。要求无人机机动性强,飞行高度低,且侧面纹理丰富,旋翼五镜头无人机既能保证其纹理要求又能保证作业机动性。
3航摄及实景建模作业流程
依据航空摄影规范和飞行有关规定,根据项目要求和作业区实际情况,从摄区的自然地理情况、技术设备情况、资金情况、飞行空域概况等方面,结合本文提出的作业类型,进行系统的分析,选择作业方案。
3.1航摄环境条件
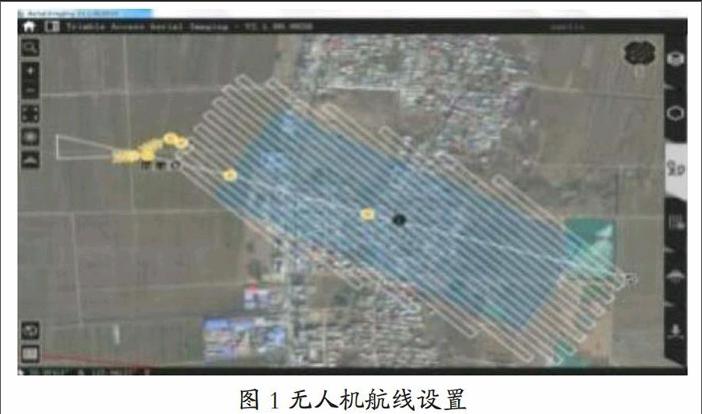
测区航线敷设时,荒漠、高山区隐蔽地区等和测图控制作业比较困难的地区,可以选择敷设构架航线,构架航线根据测图控制布点设计的要求设置:航线敷设要保证架次之间相邻航线重叠度;水域、海区航摄时,航线敷设要考虑到像主点落水对重叠度的影响,保证地物完整覆盖。
航摄时间的确定主要考虑:其一既要保证充足的光照度,又要避免过大的阴影:其二避开雾或雾霾天,保证一个好的大气透明度;其三水面、砂砾等反光强烈的地物面积较大时,应避开光照强烈的正午前后;此外,风较大的时候适当降低航高或取消航飞计划。
3.2实景建模条件
数据准备,首先内外业数据交接,包括架次、航线布设,航高、重叠度设置,风力、阴晴等天气状况,建筑物、植被、水面等地物状况,实测控制点等相关文件;此外,控制点TGO平差,静态数据TBC平差。
数据检查,对控制点数据,照片质量等进行检查。一方面避免控制点偶然误差:另一方面将类似水面上反光严重的照片等影响成像质量的照片摘选出来,保证实景模型质量。
3.3内外业流程
无人机航摄及实景建模内外业整体作业流程如图3所示。
结束语:无人机技术的迅速发展给后数据处理带来了更多的可能。本文仅以无人机技术与实景建模技术在工程应用中的实践进行了分析与方案建议,结合了自身数年来对航测三维项目的实践经验,针对项目特点综合考虑了现有无人机的技术参数及性能特点,结合差分、像控保证工程精度的同时最大限度的提高作业效率。此外,部分工程项目受限于现有无人机性能,实施困难,相信随着民用无人机市场的蓬勃发展,未来无人机性能将会解决或简化大部分现有技术问题。endprint
猜你喜欢
中学生报·教育教学研究(2022年24期)2022-07-15
科学家(2022年4期)2022-05-10
学校教育研究(2022年9期)2022-04-18
中国房地产业·上旬(2017年2期)2017-10-21
初中生世界·九年级(2017年8期)2017-09-06
商情(2016年40期)2016-11-28
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
科技视界(2016年15期)2016-06-30
中学生数理化·高一版(2016年6期)2016-05-14
商场现代化(2016年7期)2016-04-27