考虑不同边界条件悬臂梁的模态研究
2017-11-06 02:29刘建英王效岳宫金良
振动与冲击 2017年19期
刘建英,王效岳,宫金良
(山东理工大学 机械工程学院,山东 淄博 255049)
考虑不同边界条件悬臂梁的模态研究
刘建英,王效岳,宫金良
(山东理工大学 机械工程学院,山东 淄博 255049)
为了提高假设模态法建立动力学模型的精确性,研究了将柔性机械臂简化为更精确的悬臂梁模型的问题。通过分析不同边界条件对Euler-Bernoulli悬臂梁横向振动的影响规律,将悬臂梁自由端的剪力边界条件具体化为集中质量和拉伸弹簧,弯矩边界条件具体化为扭转弹簧和转动惯性元件,得到了各种边界条件下悬臂梁的模态频率和模态振型的变化规律。结果表明添加边界条件的悬臂梁模型可以更好地表示柔性机械臂的模态振动,因此可以提高假设模态法建立的动力学模型的精确性。针对柔性机械臂之间模态振动耦合较强,添加边界条件无法表示柔性机械臂模态频率的变化规律,提出了修正当量密度的方法。最后给出了边界条件和修正当量密度的迭代计算方法,并用ANSYS和ADAMS联合仿真分析了由驱动关节和自由关节连接的二连杆柔性机械臂模型对应的模态振动,验证了计算方法的正确性。
柔性机械臂;悬臂梁模型;边界条件;模态振动
因柔性机械臂有负载大,质量轻,耗能低等特点,以及柔性欠驱动机械臂具有丰富的动力学行为[1-2],近几年受到越来越多关注。在建立柔性机械臂动力学模型时需要对其进行离散化。由于机械臂的离散方法直接决定了动力学方程精度,因此如何对柔性机械臂离散是多柔体动力学领域的重点和难点之一,目前较有效的方法有假设模态法[3-4]、有限元法[5]和Bezier插值法[6-7]。假设模态法是从振动的固有特性出发,运用模态振动的线性组合描述物体的弹性振动[8-9]。有限元法虽然通用性强,但建立的动力学方程含有较多的广义变量,会导致巨大的计算量[10]。Bezier插值法作为变形体新的离散方法,对于其处理多体系统动力学及其控制问题尚未找到相关文献。假设模态法以较少的自由度和方程数目来实现系统的离散,为了便于控制,柔性机械臂多采用此方法建立动力学方程[11]。但在将柔性机械臂简化时,多数文献直接将柔性机械臂简化为简支梁或者悬臂梁,而未进一步分析简化原因以及简化后模型的精确性[12]。
在欠驱动柔性机人中既包含驱动关节也包含自由关节,柔性机械臂的受力情况较复杂,因此其离散模型不能直接使用简支梁或悬臂梁。文献[13]根据柔性机械臂末端受弯矩和剪力情况,将柔性机械臂简化为固定梁、简支梁或者悬臂梁。然而将梁边界条件视为两端简支或固定,则此模型不能体现由于机械臂的柔性变形导致的末端位置的变化。也就是说这种简化的假设前提是,柔性机械臂变形前后两端关节的相对位置不变,所以简化后的模型不够精确。文献[14-15]数据表明,柔性机械臂简化成悬臂梁更为准确。在使用假设模态法建模时,应具体分析柔性机械臂的模态特性。本文研究了不同边界条件对悬臂梁模态振动和模态振型变化规律的影响。应用ANSYS和ADAMS联合仿真对柔性机械臂进行模态分析。根据所得规律,选用合适的边界条件表示柔性机械臂的模态振动受驱动关节或自由关节的影响。
1 不同边界条件对悬臂梁模态振动的影响规律
1.1悬臂梁横向自由振动微分方程
悬臂梁模型见图1。
根据等截面Euler-Bernoulli梁弯曲理论,梁的无阻尼振动微分方程[16]为
(1)
采用分离变量法求解式(1),即令
w(x,t)=φ(x)δ(t)
(2)
(3)
式中:δ(t)为时间相关函数,其中常数A,B由梁的初始条件决定;φ(x)为振型函数,其中常数C1,C2,C3,C4,β由梁的边界条件决定。
将悬臂梁自由端的边界条件分为两类:剪力和弯矩。
(1) 剪力边界条件:末端包含拉伸弹簧和集中质量的边界条件为

(4)
(2) 弯矩边界条件:末端包含扭转弹簧和转动惯性元件的边界条件为
(5)
式中:E为弹性模量;I为截面惯性矩;kt为扭转弹簧刚度;k为拉伸弹簧刚度;I0为转动惯性元件的转动惯量;m为梁末端集中质量。
下面将使用具体的梁,研究不同边界条件对悬臂梁模态振动的影响,梁的相关参数为:梁的长度l=0.25 m;宽度b=0.03 m;厚度h=0.004 m;抗弯截面系数I=1.6×10-10m4;弹性模量E=6.9 GPa;密度ρ=2 800 kg/m3;梁的质量m0=0.084 kg;梁的末端质量m=1.326 5 kg。
1.2剪力边界条件对梁横向振动的影响分析
末端集中质量与拉伸弹簧边界条件分别为
(6)
(7)
编写求解振动微分方程的MATLAB程序。
图2是悬臂梁末端添加集中质量后梁的模态频率的变化曲线。图3是末端含有不同集中质量的悬臂梁的前三阶模态振型。

图2 末端集中质量对悬臂梁的模态频率的影响曲线Fig.2 The influence of the concentration mass on the modal frequency of the cantilever beam
由图2与图3对照可知,末端集中质量主要影响悬臂梁自由端的振幅。集中质量越大,梁的自由端的振幅越小,梁的振动频率越低。当集中质量大于梁的质量时,二阶及其高阶模态振型末端很快接近零,而一阶振型的末端则缓慢接近零,所以当集中质量继续增大时,集中质量只对其一阶模态频率有明显影响。并且当集中质量无穷大时,一阶振型趋近x轴,一阶模态频率趋近于零。

(a)(b)(c)
concentrated mass at the end
图4是悬臂梁末端添加拉伸弹簧后梁的模态频率的变化曲线。图5是含有不同刚度拉伸弹簧的悬臂梁的前三阶模态振型。

图4 拉伸弹簧刚度对悬臂梁的模态频率影响曲线Fig.4 Modal frequency curve of the cantilever beam with the tensile spring stiffness
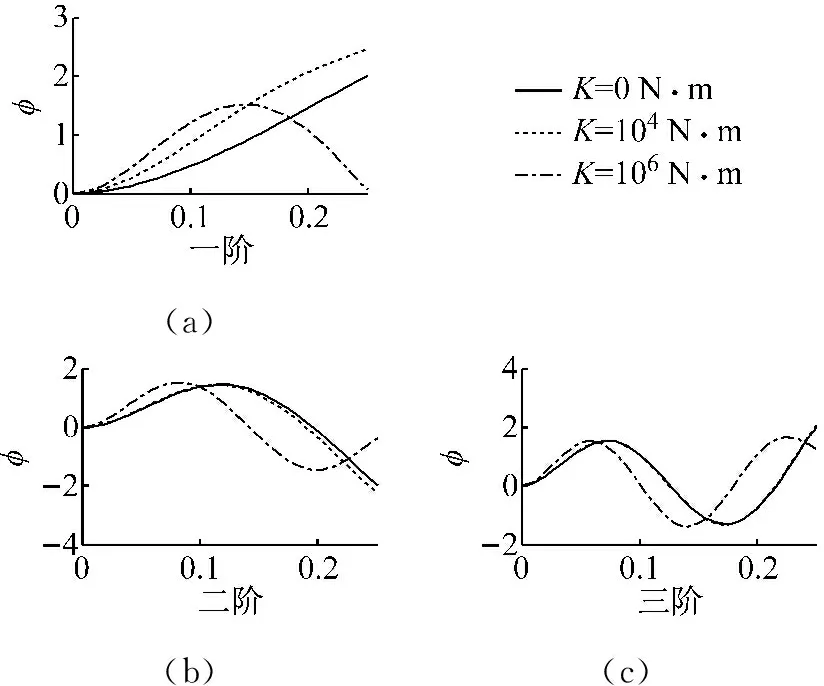
(a)(b)(c)
由图4与图5对照可知,随着拉伸弹簧的刚度增大,悬臂梁的模态振型和模态频率越来越接近边界条件是固定—简支梁。理论上,当拉伸弹簧的刚度无穷大时,悬臂梁自由端挠度值为零,不受弯矩,因此悬臂梁的模态振型和模态频率等同于固定—简支梁。
1.3弯矩边界条件对梁横向振动的影响分析
扭转弹簧和转动惯性元件边界条件分别为
(8)
(9)
图6是悬臂梁末端添加扭转弹簧后悬臂梁的模态频率的变化曲线。图7是含有不同刚度扭转弹簧的悬臂梁的前三阶模态振型。
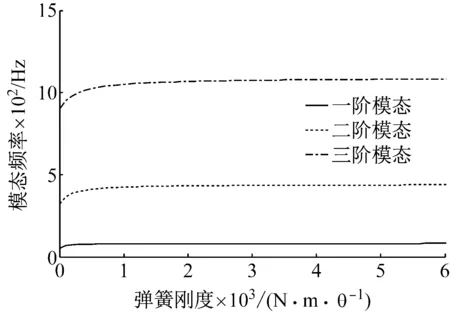
图6 扭转弹簧刚度对悬臂梁的模态频率影响曲线Fig.6 Influence of torsional spring stiffness on the modal frequency of a cantilever beam
(a)(b)(c)
由图6与图7对照可知,扭转弹簧可在一定程度上增大悬臂梁自由端的振幅,其模态频率也随之增大。扭转弹簧刚度在一定范围内对悬臂梁的模态频率与模态振型影响较大。当扭转弹簧刚度增加到一定值后,弹簧刚度的增大对悬臂梁的模态振型和模态频率影响变得非常小。
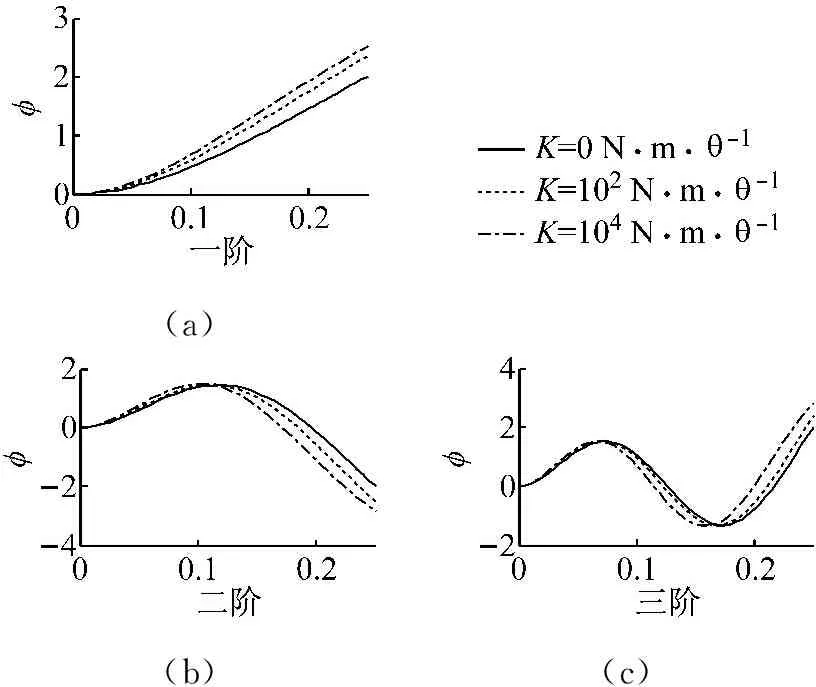
图8是悬臂梁末端添加转动惯性元件后悬臂梁的模态频率的变化曲线。图9是含有不同转动惯量元件的悬臂梁的前三阶模态振型。
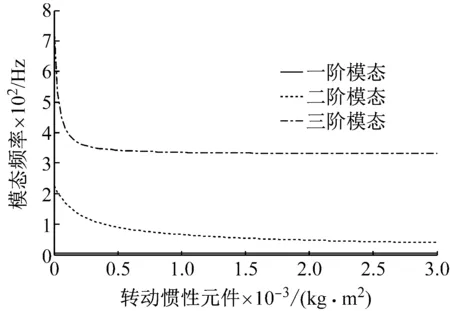
图8 转动惯性元件对悬臂梁的模态频率影响曲线Fig.8 Modal frequency influence curve of rotating inertial components on a cantilever beam

(a)(b)(c)
由图8和图9对照可知,受到转动惯性元件的影响,悬臂梁的高阶模态频率和模态振型越来越趋近于低阶的模态振型和模态频率。图9中,当I0为0.001 kg·m2与0相比时,梁的二阶振型与一阶振型相似,三阶振型与二阶振型相似。转动惯性元件对二阶及其高阶模态频率影响较大,当转动惯性元件的转动惯量增大到一定值后,各阶模态频率的变化趋于平缓。
由以上分析可知,不同边界条件对悬臂梁的模态振型和模态频率变化规律的影响相差很大。同样是剪力边界条件,集中质量和拉伸弹簧对悬臂梁的模态频率和模态振型影响完全不同。扭转弹簧刚度和转动惯性元件对悬臂梁的模态频率和模态振型影响也不同。因此,在将柔性机械臂简化为悬臂梁时,不能简单地根据机械臂末端受弯矩或剪力的情况把梁末端的边界条件视化为固定端或简支端。而是需要仔细分析柔性机械臂的模态频率和模态振型的变化规律,选择具有合适边界条件的悬臂梁模型。
2 柔性机械臂与刚性机械臂连接对应悬臂梁的边界条件
ADAMS是较常用的多体动力学分析软件。对于刚柔耦合系统动力的分析,ADAMS应用模态叠加法模拟柔性体的弹性变形[17],构件的模态数据由ANSYS生成,分析结果可靠性高。本文将应用ANSYS与ADAMS联合仿真,将柔性机械臂的柔性杆部分在ANSYS中划分单元,并生成包含模态信息的中间文件。将中间文件导入到ADAMS中,完成柔性机械臂建模后进行模态分析。
把柔性机械臂作为刚柔耦合构件分析。建立ADAMS模型时把连接电机和柔性杆的电机座视为刚体,用长方体表示。把柔性机械臂末端的电机与编码器视为集中质量添加在柔性杆的末端,用半径为4 mm的球体代替。则刚体、柔性杆和球体组合表示完整的柔性机械臂。建立好ADAMS模型后,进行无阻尼模态分析。
图10是柔性机械臂的ADAMS模型。表1是柔性机械臂模型的模态分析与Euler-Bernoulli悬臂梁的理论计算结果。

图10 单个柔性机械臂的ADAMS模型Fig.10 ADAMS model of a single flexible manipulator
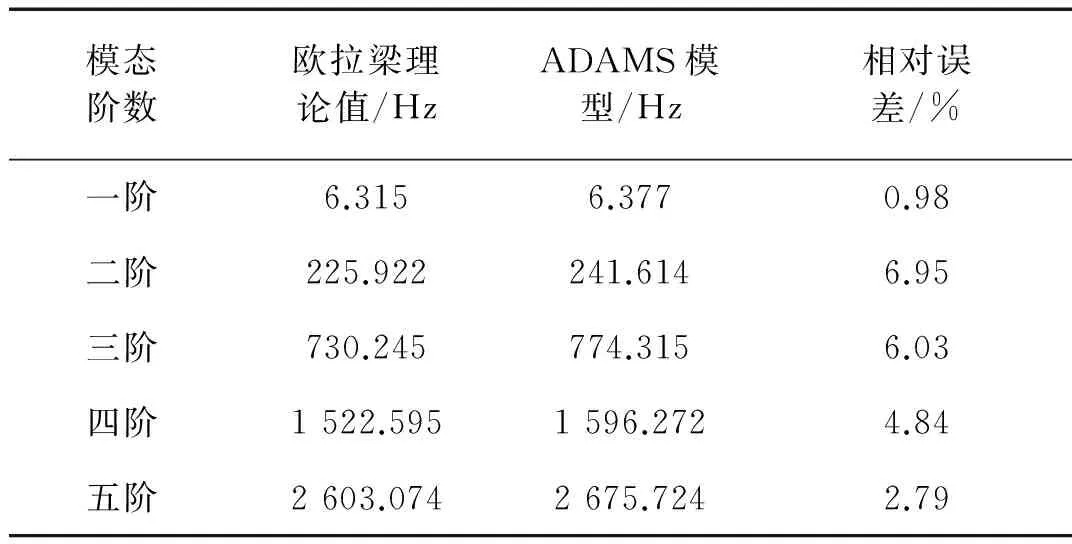
表1 末端包含集中质量柔性梁的模态频率结果比较Tab.1 Comparison of modal frequency results of concentrated mass flexible beams at the end of the end
由表1数据对比可知,将柔性机械臂简化为末端集中质量的悬臂梁模型,其计算结果可以保持在较小误差内,因此说明简化模型正确并可用。
在ADAMS中,柔性机械臂的末端添加一个刚性机械臂,关节处用转动副连接。若关节是驱动关节则在关节处添加转动电机,其关节自由度为零。若是自由关节则不加电机,其自由度为1。表2是驱动关节连接时柔性机械臂模型的模态分析结果。
表2柔性机械臂驱动关节连接刚性机械臂的模态频率
Tab.2Themodalfrequencyoftheflexiblemanipulatorisaddedtodrivethejointtoconnecttherigidarm

模态阶数欧拉梁理论值/Hz连接刚性机械臂模型/Hz相对误差/%一阶2.2832.2800.13二阶326.511354.7738.66三阶899.942969.5727.74四阶1764.1891895.4917.44五阶2916.2563121.5377.04
表2中,第三列数据是柔性机械臂末端添加了刚性机械臂的模态分析结果。第二列数据是添加了边界条件后,悬臂梁的前五阶模态频率的理论值。边界条件的选择方法是,将表2的第三列和表1的第三列数据比较,分析其变化规律变化,再结合上文中不同边界条件对悬臂梁模态频率的影响规律。最终选定柔性机械臂对应悬臂梁的边界条件为:集中质量和扭转弹簧。ADAMS模型分析值与理论值的相对误差说明:此边界条件在误差允许范围内正确,可以表示驱动关节连接时刚性机械臂对柔性机械臂模态频率的影响。
集中质量和扭转弹簧刚度的迭代求法为:将连接刚性机械臂模型的前两阶模态频率值带入频率特征方程中,得到两个方程。方程组有两个变量,即:集中质量和扭转弹簧刚度。使用不动点迭代法求解,由于迭代方程不收敛,因此用for循环选合适的初值,最后用理论计算值和分析值的相对误差作为跳出循环的判断条件。经MATLAB编程求解,集中质量为41.15 kg,扭转弹簧刚度为2.3×105 N·m/θ。
若柔性机械臂与刚性机械臂经自由关节连接,其模态分析结果见表3。
表3柔性机械臂自由关节连接刚性机械臂的模态频率
Tab.3Themodalfrequencyoftheflexiblemanipulatorwithfreejointsconnectedwiththerigidmanipulator
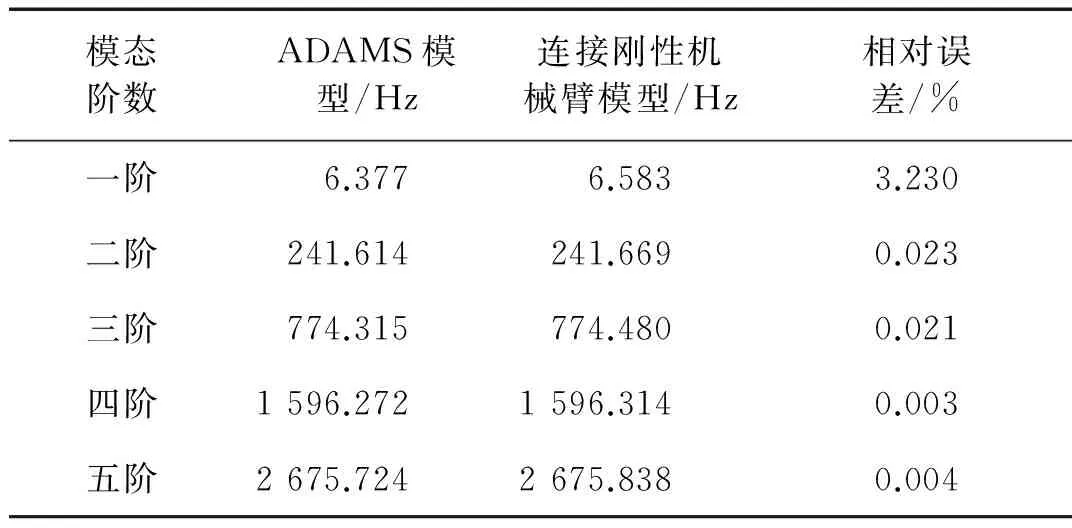
模态阶数ADAMS模型/Hz连接刚性机械臂模型/Hz相对误差/%一阶6.3776.5833.230二阶241.614241.6690.023三阶774.315774.4800.021四阶1596.2721596.3140.003五阶2675.7242675.8380.004
由表3中的相对误差可知,在自由关节连接条件下,刚性机械臂对柔性机械臂的模态频率影响很小,可以忽略。因此柔性机械臂可以直接简化为包含末端集中质量的悬臂梁模型。
3 柔性机械臂与柔性机械臂连接对应悬臂梁的边界条件
在ADAMS中,柔性机械臂末端添加一个柔性机械臂,关节处用转动副连接。关节处若添加电机则为驱动关节,若不添加电机则为自由关节。分析驱动关节连接对柔性机械臂的影响。表4是驱动关节连接时柔性机械臂模型的模态分析结果。
表4柔性机械臂驱动关节连接柔性机械臂的模态频率
Tab.4Themodalfrequencyoftheflexiblemanipulatorisaddedtodrivethejointtoconnecttheflexiblearm
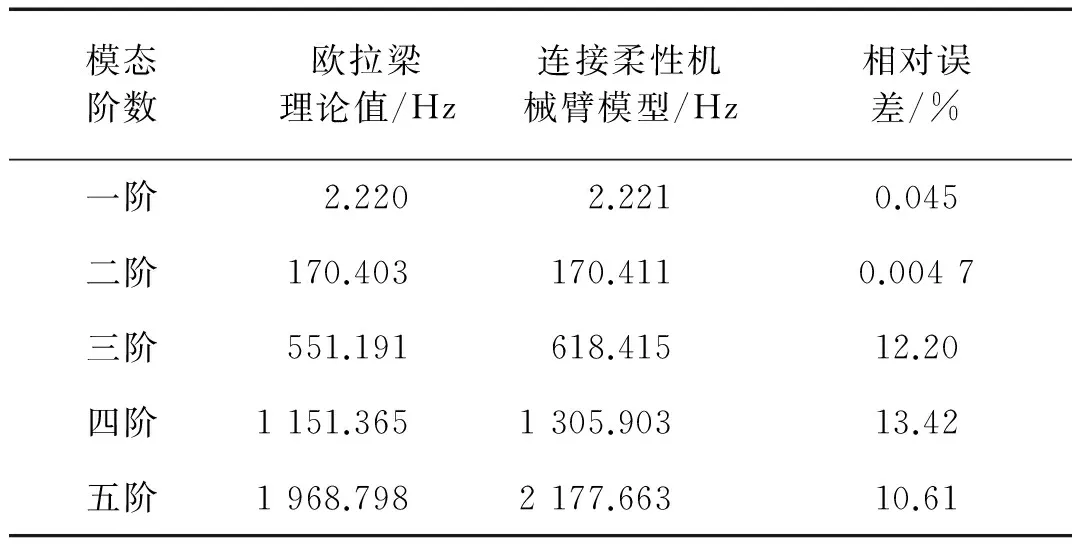
模态阶数欧拉梁理论值/Hz连接柔性机械臂模型/Hz相对误差/%一阶2.2202.2210.045二阶170.403170.4110.0047三阶551.191618.41512.20四阶1151.3651305.90313.42五阶1968.7982177.66310.61
表4中,第三列数据是柔性机械臂末端添加了柔性机械臂的模态分析结果。比较表4的第三列和表1的第三列数据,经分析和计算,没有适合的边界条件能表达这种规律。因此也体现出,驱动关节连接时柔性机械臂之间的振动耦合现象较明显。基于当量密度对梁的模态频率影响规律,见图11。本文提出添加末端集中质量和修正当量密度的表示方法。表4的第二列数据是修正了梁的当量密和添加末端集中质量后,悬臂梁的前五阶模态频率理论值。ADAMS模型分析值与理论值的相对误差说明:末端集中质量和修正当量密度的表示方法虽然存在一定误差,但可以有效的将误差保持在一定范围内,而且此方法对研究柔性机械臂之间的振动耦合有意义。
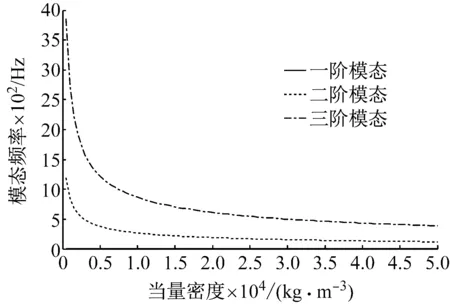
图11 当量密度对悬臂梁的模态频率影响曲线Fig.11 The influence of equivalent density on the modal frequency of the cantilever beam
集中质量和当量密度的迭代求法为:
将连接柔性机械臂模型的前两阶模态频率值带入频率特征方程中,得到两个方程。方程组有两个变量,即集中质量和当量密度。使用不动点迭代法求解,迭代方程收敛。编写MATLAB求解程序,经3次迭代后求得集中质量为11.043 kg,梁的当量密度为4 891.99 kg/m3。
若柔性机械臂与柔性机械臂为自由关节连接,模态分析结果见表5。
表5柔性机械臂自由关节连接柔性机械臂的模态频率
Tab.5Themodalfrequencyoftheflexiblemanipulatorwithfreejointsconnectedwiththeflexiblemanipulator

模态阶数ADAMS模型/Hz连接柔性机械臂模型/Hz相对误差/%一阶6.3776.3051.291二阶241.614241.6090.002三阶774.315774.3110.005四阶1596.2721596.2680.0003五阶2675.7242675.7190.0002
由表5中的相对误差可知,自由关节连接条件下,柔性机械臂对柔性机械臂的模态频率影响很小,可以忽略。因此柔性机械臂可以直接简化为包含末端集中质量的悬臂梁模型。
4 结 论
不同边界条件对悬臂梁的模态振型和模态频率变化规律的影响相差很大。因此,将柔性机械臂简化为悬臂梁时,不能简单地根据机械臂末端受弯矩或剪力把梁末端的边界条件简化为固定端或简支端。分析了两个实例:① 刚性机械臂对柔性机械臂的模态影响,若是驱动关节连接时,可用包含集中质量加扭转弹簧边界条件的悬臂梁表示,若是自由关节连接,则可忽略刚性机械臂对柔性机械臂的模态影响;② 柔性机械臂对柔性机械臂的模态影响,若是驱动关节连接,提出了用包含集中质量和修正当量密度的悬臂梁表示若是自由关节连接,柔性机械臂对柔性机械臂的模态影响同样可忽略。
仿真结果表明,添加了合适边界条件的悬臂梁模型,能很好的表示柔性机械臂运动过程中的柔性效应。通过研究边界条件对悬臂梁的模态影响,不仅能提高假设模态法建模的精度,而且进一步有利于提出对欠驱动柔性机械臂的有效的控制方法,以及对柔性机械臂的减震的主动控制方法。
[1] 何广平, 陆震, 王凤翔,等. 柔性欠驱动机械臂的内共振现象及应用[J]. 北京航空航天大学学报, 2005, 31(8):913-916.
HE Guangping, LU Zhen, WANG Fengxiang, et al. Internal resonance property of flexible under-actuated manipulators[J]. Journal of Beihang University, 2005, 31(8):913-916.
[2] 唐国潮, 金国光, 刘远. 柔性机械臂动力学建模及特性研究[J]. 机械科学与技术, 2009, 28(8):1031-1034.
TANG Guochao, JIN Guoguang, LIU Yuan. Dynamic modeling and performance analysis of a flexile arm[J]. Mechanical Science and Technology, 2009, 28(8):1031-1034.
[3] 方建士, 章定国. 旋转悬臂梁的刚柔耦合动力学建模与频率分析[J]. 计算力学学报, 2012, 29(3):333-339.
FANG Jianshi, ZHANG Dingguo. Rigid-flexible coupling dynamic modeling and frequency analysis of a rotating cantilever beam[J]. Chinese Journal of Computational Mechanics, 2012, 29(3):333-339.
[4] 王斌锐, 方水光, 金英连. 综合关节和杆件柔性的机械臂刚柔耦合建模与仿真[J]. 农业机械学报, 2012, 43(2): 211-215.
WANG Binrui, FANG Shuiguang, JIN Yinglian. Dynamics and simulation of rigid-flexible coupling robot arm with flexible joint and link[J]. Chinese Journal of Agricultural Machinery, 2012, 43(2): 211-215.
[5] 崔玲丽, 张建宇, 高立新, 等. 柔性机械臂系统动力学建模的研究[J]. 系统仿真学报, 2007, 19(6):1205-1208.
CUI Lingli, ZHANG Jianyu, GAO Lixin, et al, Research on Dynamic Modeling of Flexible Manipulator System[J]. Journal of System Simulation, 2007, 19(6):1205-1208.
[6] 范纪华, 章定国. 旋转柔性悬臂梁动力学的Bezier插值离散方法研究[J]. 物理学报, 2014, 63(15):154501.
FAN Jihua,ZHANG Dingguo. Bezier interpolation method for the dynamics of rotating flexible cantilever beam[J]. Journal of Physics, 2014, 63(15):154501.
[7] 范纪华, 章定国. 旋转悬臂梁动力学的B样条插值方法[J]. 机械工程学报, 2012, 48(23):59-64.
FAN Jihua, ZHANG Dingguo. B-spline interpolation method for the dynamics of rotating cantilever beam[J]. Chinese Journal of Mechanical Engineering, 2012, 48(23):59-64.
[8] 王磊, 陈柳, 何玉林,等. 基于假设模态法的风力机动力学分析[J]. 振动与冲击, 2012, 31(11):122-126.
WANG Lei, CHEN Liu, HE Yulin, et al. Dynamic analysis of a wind turbine base on assumed mode method[J]. Journal of Vibration and Shock, 2012, 31(11):122-126.
[9] 陈思佳. 刚-柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究[D]. 南京:南京理工大学理学院, 2012: 34-46.
[10] HE X S. Dynamic modeling of flexible beam with considering shear deformation in non-inertial reference frame[J]. Acta Physica Sinica, 2011, 60(4):271-277.
[11] 曹青松, 黎林, 张敏. 压电型柔性机械臂动力学建模研究[J]. 煤矿机械, 2010, 31(4):48-51.
CAO Qingsong, LI Lin, ZHANG Min. Research on dynamic modeling of piezoelectric flexible manipulator[J]. Coal Mine Machinery, 2010, 31(4):48-51.
[12] 田颖. 轮式悬架移动柔性机械手动力学建模分析与仿真[D]. 天津:河北工业大学机械工程学院, 2014: 13-22.
[13] 陈炜, 余跃庆, 张绪平,等. 欠驱动柔性机器人动力学建模及仿真[J]. 中国机械工程, 2006, 17(9):931-936.
CHEN Wei, YU Yueqing, ZHANG Xuping, et al. Dynamic modeling and simulation of underactuated flexible robot[J]. China Mechanical Engineering, 2006, 17(9):931-936.
[14] ZHU Y, QIU J, TANI J. Simultaneous optimization of a flexible robot arm[J]. Jsme International Journal, 2000, 43(1):32-37.
[15] SPECTOR V A, FLASHNER H. Modeling and design implications of noncollocated control in flexible systems[J]. Journal of Dynamic Systems Measurement & Control, 1990, 112(2):186-193.
[16] RAO S S. Mechanical Vibrations[M]. 李欣业,张明路,译. 4版. 北京: 清华大学出版社, 2009:439-449.
[17] 张永德, 汪洋涛, 王沫楠, 等. 基于ANSYS与ADAMS的柔性体联合仿真[J]. 系统仿真学报, 2008, 20(17):4501-4504.
ZHANG Yongde, WANG Yangtao, WANG Monan, et al. Co-simulation of flexible body based on ANSYS and ADAMS[J]. Journal of System Simulation, 2008, 20(17):4501-4504.
Modalanalysisofcantileverbeamswithdifferentboundaryconditions
LIU Jianying, WANG Xiaoyue, GONG Jinliang
(College of Mechanical Engineering, Shandong University of Technology, Zibo 255049, China)
In order to improve the accuracy of the dynamic model of a flexible manipulator, deduced by the assumed mode method, the manipulator was simplified as a cantilever beam. By analyzing the influences of different boundary conditions on the lateral vibration of the Euler-Bernoulli cantilever beam, the shear boundary condition at the cantilever free end was specified as a specific mass and a tensile spring, and the bending moment boundary conditions were specified as specific torsion springs and rotational inertia components. The modal frequencies and vibration modes of the cantilever beam under various boundary conditions were calculated. The results show that the cantilever beam model attached with the specified boundary conditions can better describe the vibration of the flexible manipulator, and improve the accuracy of the dynamic model deduced by the assumed modal method. Considering the strong coupling between the modes of the flexible manipulator the method of equivalent density correction was further put forward. Finally, the iterative calculation method for taking into account the specified boundary conditions and the modified equivalent density was proposed. The ANSYS and Adams were used combinedly to simulate and analyse the vibration modes of a flexible manipulater with two links connected by driving joints and free joints, and the correctness of the calculation method was thus verified by the results.
flexible manipulator; cantilever beam model; boundary condition; modal vibration
TH113.1
A
10.13465/j.cnki.jvs.2017.19.033
国家自然科学基金(61303006);山东省优秀中青年科学家科研奖励基金项目(BS2012ZZ009)
2016-04-01 修改稿收到日期:2016-08-10
刘建英 男,硕士生,1990年2月生
王效岳 男,博士,教授,1961年3月生
猜你喜欢
数学物理学报(2022年5期)2022-10-09
农业工程学报(2022年12期)2022-09-09
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
汽车实用技术(2021年1期)2021-01-25
水电站设计(2020年4期)2020-07-16
特种结构(2019年2期)2019-08-19
华东师范大学学报(自然科学版)(2019年3期)2019-06-24