
基于北斗导航的植保无人机定位设计
2017-11-08 22:23王高亮王强罗嘉伟孙晓红
智能计算机与应用 2017年5期
王高亮+王强+罗嘉伟+孙晓红

摘要:农用植保无人机是农业植保领域的重要设备,具有效率高、运行费用低的特点,已经逐渐取代了人工植物保护,成为农业植保领域的中流砥柱。研发和制作出高精度的基于北斗导航植保无人机定位系统是将来农业植保无人机推向市场的重要冲破点。长期以来则一直是各大高校研究的热点,且在实际使用过程中获得了长足的发展。GPS是应用在多旋翼无人机上完成独立飞行的普遍使用方式。而国内的BDS定位体系是在GPS、“格雷纳斯”、“伽利略”卫星导航系统之后,由本国自主研发、拥有全部知识产权,稳定覆盖亚太地区的一种全新定位方式。
关键词: 植保无人机; 北斗定位系统; GPS 定位; BDS定位
中图分类号: TP391
文献标志码:A
文章编号: 2095-2163(2017)05-0046-04
Abstract:Agricultural plant protection unmanned aerial vehicle (UAV) is an important equipment in the field of agricultural plant protection,which has the characteris of high efficiency and low operating cost. It has gradually replaced the artificial plant protection and become the mainstay of the field of agricultural plant protection. Development and production of highprecision plant protection unmanned aerial vehicle based on Beidou navigation would be an important breakthrough point for agricultural plant protection unmanned aerial vehicle coming into the market. And the topic has been a major focus of research for a long time,meanwhile obtained the considerable development in the process of actual use. GPS is a common way to achieve autonomous navigation in multi rotor UAV. Following GPS, "Geleinasi", "Galileo" satellite navigation system, the BDS positioning system is a new positioning method of stability in the AsiaPacific region, independently researched and developed with all the intellectual property rights in China.
Keywords: plant protection unmanned aerial vehicle; Beidou positioning system; GPS positioning; BDS positioning
0引言
多旋翼无人机是机器人学中的一个重要分支,重点强调了无人机的自主移动能力,比固定的机器人面临着更为复杂的不确定性环境,但同时也具有更大的灵活性、活动范围和应用领域。本项目使用河南嘉科智能控制科技有限公司的多旋翼植保无人机,用于研究无人机的定位技术,制作了基于北斗全球卫星导航系统(BDS)的多旋翼无人机定位系统与多旋翼无人机卫星监控软件,并且在户外做了区间定位性能检测。
本文结合BDS的构成,从抵触理论上演算了全球卫星定位的可行性,做了仔细的误差分析。设计了BDS定位程序,成功获得了植保无人机实時的经度、纬度、时间、高度。设计了R485通讯与建立地图的核心部位功能解算方法,初步实现了良好的人机交互。使用无线数据传达信息的方式实现植保无人机与操作者的监控软件通讯,这样可以极易控制无人机。另外比较了北斗导航与GPS的可见卫星的数量、空间分布、精度的因素,静态定位精度,提升了植保无人机的自动化水平,为后续的科研奠定了良好的实施基础。
1无人机研究背景及意义
多旋翼无人机在无人机家族中具有承上启下的作用,同时具有极强的垂直起降的功能,且制造成本低,操作简单等优点,在生产生活中发挥了极大的价值。无人机自主导航问题归结对“where am I?”,“What does the world looks like?”,“where do you want to go?”和“How do I get there?” 等4个基本问题的解答。因此,机器人定位、建模制图、运动控制、路径规划是无人机导航定位任务必须解决的四大技术,只有在此基础上才能进一步开展优化设计研究等[1]。
BDS是世界上目前为止能独立运行的全球四大卫星导航家族之一,而且全部都是由中国科学家们独立操刀设计和正在施工建造的全球导航系统。本课题研究多旋翼无人机的定位技术,基于北斗导航的多旋翼植保无人机定位模块和多旋翼无人机地面站。多旋翼植保无人机在农药喷洒、植保飞防等领域有很大的优势,在实际操作中还有很多不稳定的因素,最主要问题就是,如何获得准确的定位坐标[2]。
2无人机定位技术分析
2.2GPS定位endprint
美国的GPS[6-7]是全球使用范围最广、性能最稳定的系统。GPS 系统主要由空间段、地面段和用户段等3部分构成。各个轨道面上的每一个卫星都是分散发布的;每一条空间轨迹的倾斜角度计为 60°;6个升集合点等间隔配置,即每一个平面的升交点的赤经有60°的误差;这种空间卫星分布的另一个优点是确保至少有4颗卫星在世界任何地方和任何地点被观测到,特别是在高纬度地区。地面段主要由 1 个主控站、6 个监测站和 4 个注入站组成。地面段为个人 GPS接收机,接收机的根本作用是回收GPS回传调制信号、解析电报和运行导航数据,为地面端发送时间、位置坐标和测速服务。
中国在1994年建成了第一代北斗系统。GPS的操作方式十分简易,用户携带一台GPS接收机就可使用其提供的免费服务,但是授权服务是收费的[8]。美国的GPS一共提供2种信号,即C/A 码和仅验证后才能使用的P码。第一个C/A 码是完全免费的,操作简单,目前的定位准确度在以100 cm为半径的圆面积;第二种P码就是直接使用在国防等高准确度要求环境下。在2000年以前欧美科学家就在第一种信号中人为地夹杂了选择性误差算法,即SA 战略,这就是第一种信号的准确度极差的原因,其定位的坐标偏差有的会在上百米以上,之所以要加入误差算法的目地是拒绝其他国家对GPS信号进行恶意干扰;2000年之后,美国才撤除SA 战略,第一种信号才有了今天的GPS高精度数据。
3北斗导航定位理论基础
3.1BDS 空间卫星星座
BDS 采用的是混合空间的星座,与其他国家的卫星系统有着根本性的差别。其在太空内由5枚静止的轨道卫星和30枚非静止轨道卫星共35枚导航卫星构成;30枚的非静止轨道卫星包括3枚地球异步平直轨道卫星和27枚地球中间轨道导航卫星,27枚分布倾角为55°。这样,卫星星座可以由3个不同轨道高度的卫星集结表征,能弥补MEO卫星随着时间推移的功能欠缺,在中国,将可以有效地提升国内区域星座布局的整体运行态势。可为中国与周边国家的高准确的坐标提供全天候服务。如图2所示。
3.2BDS 地面端
BDS的地面控制系统一共是由3个模块组成,1 个主控站、2 个注入站、30 个监测站。
监测站实时跟踪掌控卫星监测站和临近空间的工作状态、地理环境变化,将监控信息发送到主站。
主站监控站接收和处理数据的发送,待卫星导航电文和星历数据发送到主站后,还负责监测站和注入站的管理,确保BDS的正常运行。
注入站在主控站的制约下,对导航数据进行控制管理,将卫星电报、卫星星历、差分数据等注入到卫星的数据保存系统中,并在分析监测注入的信息后判断是否正常。
4基于BDS的无人机定位系统总体设计
本研究所使用的植保无人机平台是河南嘉科智能控制科技有限公司自主研发的一款多旋翼植保无人机。具有农田喷洒农药、病虫害检测等功能。该多旋翼植保无人机的外观如图3所示。
4.1植保无人机体系构造
本课题所设计的多旋翼无人机定位系统按照功能可以劃分为两大部分:上位机系统、多旋翼无人机的硬件系统。而多旋翼无人机的硬件系统又可分为3层。具体阐释如下。
首先,最顶层为嵌入式 Linux系统层。多旋翼植保无人机上连接的地面端可以显示多旋翼植保无人机当前各个模块的运行状态和参数,用户可以按照需求设置相关飞行参数、多旋翼植保无人机的默认参数,该层也称为人机交互层。
其次,中间层使用了意大利ST公司的STM32F427VIT6处理器。该处理器是一个32位微型控制器,是ARM Cortex—M4的内核,超频工作可到159 MHz,并拥有内存直接访问DMA(direct memory access)选项和浮点运算单元,能在外界干预的环境下迅速进行浮点解算,为无人机提供了工业级的稳定性和安全性。主要负责飞行算法处理,例如多旋翼无人机飞行角度控制处理;多传感器的信息融合,将底层传感器采集的信息在操作处理后传输至最顶层或反馈到底层,使多旋翼无人机转换为对应的飞行状态。
第三,最底层,即STM32F405RGT6微处理器,主要负责传感器采集信息层,重点包括:BDS定位单元、电机控制单元、数据传输单元等。
4.2北斗导航定位模块
植保无人机上卫星导航定位模块采用的是和芯星通公司生产的UM 220 型芯片,图4是 UM220 测试板。和芯星通UM220是双系统高性能GNSS模块,多频率高性能S2C芯片,能够极易完成接收BD2 B1、GPS L1两个频点。UM220外形尺寸紧凑,采用SMT焊盘,适用于低成本、低功耗领域。
性能指标:尺寸16*12.2*2.4 mm,工作温度-40 ℃~85 ℃,拥有2个UART,首次定位冷启动需要30 s,热启动需
4.3微处理器模块
微处理器模块如图5所示。
微处理器模块性能参数:ARM-Cortex M4架构,32位处理器,工作频率169 MHz,196 KB的RAM,64引脚,采用LQFP封装,嵌入式接口类型丰富,共有CAN、I2C、SPI、USRT、USART、USB 6种类型。
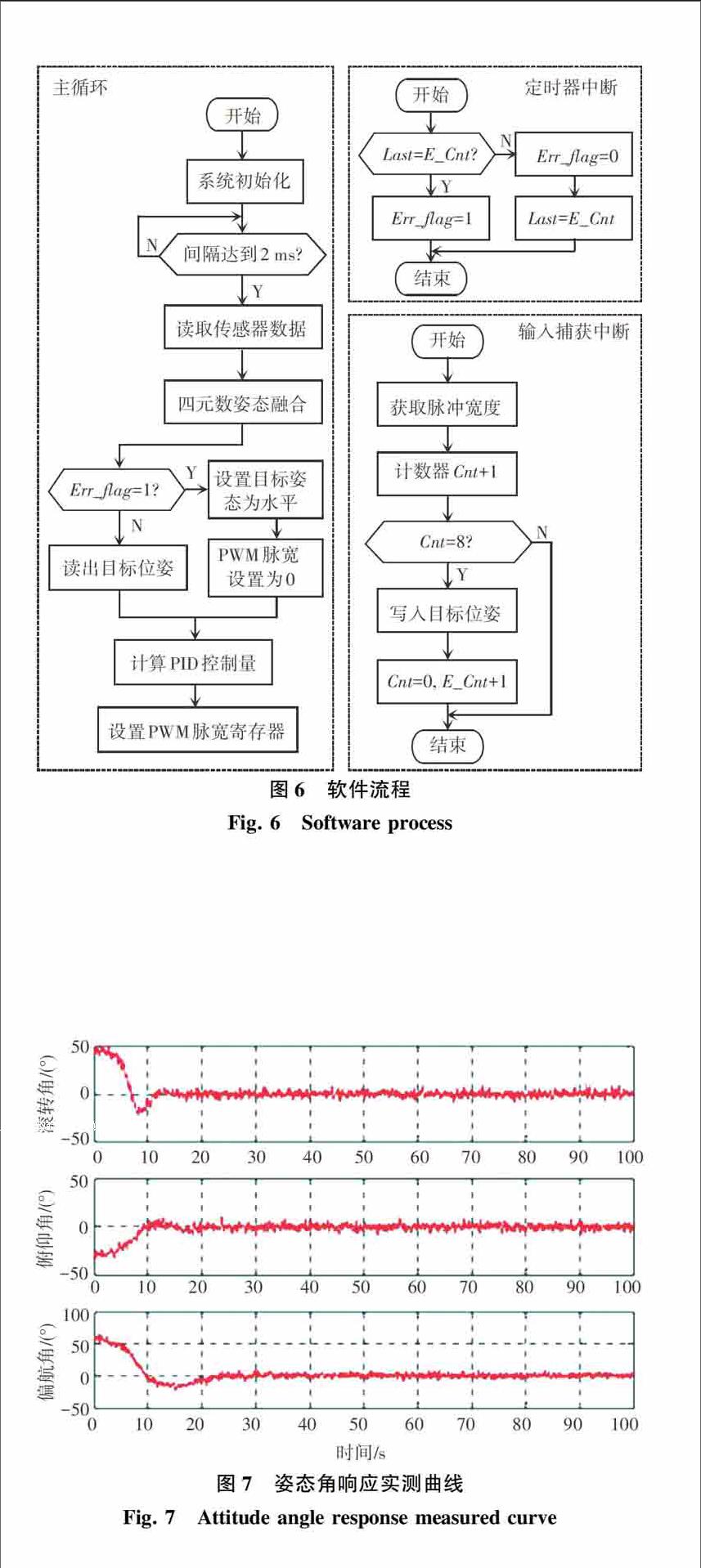
4.4控制系统软件设计
控制软件的核心任务是为无人机飞行角度的获取及把控、地面发射机数据解算、通信连接状态实时处理。与功能相对应,[JP4]将植保无人机的控制软件大致划分为3组。软件流程如图6所示。
第l组采用了微型处理器的高级IO捕获口,捕获中断程序中的遥控器S-BUS数据。采用180 Hz 作为无人机飞行角度控制频率,完成对传感器的数据的处理,再由IO口以PWM的形式传输给无人机的电子调速器,给多旋翼无人机的电机下指令,完成对无人机的操作动作。endprint
第2组是采用控制器的定时器断点函数,每隔8 ms运行一次,自检地面控制器数据的改变值。若断点函数中的捕获值与当前地面段的数据值不一致时,说明通信正常。如果一致的话,则清晰表明地面控制器已经对植保无人机失去了控制,这个时候应该马上标定连接错误符,采取相应措施给植保无人机下达返航命令,并返回主函数。
第3组为主函数部分。大多数功能都在此函数中实现。系统启动后首先初始化各个模块。然后将每一个传感器获得的数据进行姿态解算,若此时无人机返回故障信号,应该立刻把植保无人机的飞行角度设置为水平,使其能保持垂直飞行。如果没有接收失控信号,则应该继续获取输入断点代码标识的无人机飞行状态信号,解算相应的植保无人机控制算法得到控制量并调制成PWM数据,然后用DMA模块将得到的无人机数据传送至对应的子程序中,这样即可调节植保无人机的电机转速,达到最佳的调校结果。
4.5实验结果
[图7为融合了BDS数据的无人机的姿态角响应实测曲线。由于实际系统存在响应时间,实测结果比仿真结果的动态响应时间略长一些。从图7中可以看出,系统具有很好的动态响应和稳态响应,在存在外界干扰的情况下,仍能跟踪期望的姿态。
5结束语
目前,多旋翼植保无人机定位导航技术,是无人机家族的一个重要分支。本文是设计基于BDS多旋翼植保无人机导航系统。本文的核心及创新之处包括以下几个方面:
1)通过对BDS定位系统原理的研究,得出影响定位精度的因素。当用户测距误差一定时,测量精度主要取决于精度因子,并进行了定位误差来源分析。
2)NMEA0183 是目前应用广泛、成熟、可靠的卫星电文协议,其编程简单,可以根据需要从不同的导航电文中提取有用的信息。本课题设计了BDS定位子程序,成功获得了目标的经纬度、时间、海拔高度、多旋翼无人机速度以及卫星的空间分布等信息。
3)设计多旋翼植保无人机的定位系统,通过采用多传感器和BDS系统的融合,使得植保无人机在户外获得了良好的定位效果。为将来的研究提供了坚实的基础。
4)通过分析比较,并针对基于BDS 的多旋翼植保无人機定位系统进行了静态定位与动态定位。研究可得,BDS系统基本满足户外定位要求,BDS导航系统在单独定位时可以达到半径为450 cm的圆面积内的定位准确度。
参考文献:
李攀. 四旋翼直升机控制问题研究[D]. 哈尔滨:哈尔滨工业大学,2006.
[2] HOFFMANN C, HUANG Haomiao, WASLANDER S, et al. Quadrotor helicopter flight dynamics and control: Theory and experiment[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference. South Carolina: AIAA, 2007:1-20.
[3] 王卫华,熊有伦,孙容磊. 测程法系统误差的测量与校核[J]. 机器人ROBOT,2004,26(5): 454-460.
[4] 秦永元,张洪钺,汪叔华. 卡尔曼滤波与组合导航原理[M]. 2版. 西安:西北工业大学出版社,2012.
[5] 袁斌. 一种改进的基于TDOA的三维多点定位技术[J]. 信息与电脑(理论版),2012(2): 164-166.
[6] 徐兴,徐胜,刘永鑫,等. 小型无人机机载农药变量喷洒系统设计[J]. 广东农业科学,2014,41(9): 207-210.
[7] 张涛,杨殿阁,李克强,等. 车辆导航中带匹配度反馈的模糊地图匹配算法[J]. 清华大学学报(自然科学版),2009,49(2): 277-280.
[8] 赵琳,王小旭,丁继成,等. 组合导航系统非线性滤波算法综述[J]. 中国惯性技术学报,2009,17(1): 46-52,58.endprint
猜你喜欢
杂文选刊(2018年1期)2018-01-09
现代农业科技(2017年6期)2017-05-12
中学生数理化·高一版(2017年1期)2017-04-25
吉林农业·下半月(2017年3期)2017-04-14
农业工程技术·综合版(2017年1期)2017-04-05
农民致富之友(2017年3期)2017-03-16
雕塑(1996年3期)1996-07-12
